一种水下警示机器人的制作方法
1.本实用新型涉及机器人技术领域,特别涉及一种水下警示机器人。
背景技术:
2.目前,水库或者水产养殖基地,均不让下水游泳以及进行钓鱼等,然而,水库或者水产养殖基地无法人员长时间进行看管,难免出现违规者进行钓鱼以及游泳,因此设计一种水下警示机器人很有必要。
技术实现要素:
3.本实用新型要解决现有技术中的水库或者水产养殖基地无法人员长时间进行看管,难免出现违规者进行钓鱼以及游泳技术问题,提供一种水下警示机器人。
4.为了解决上述技术问题,本实用新型的技术方案具体如下:
5.一种水下警示机器人,包括船型下壳体、设置在船型下壳体上的警示机构以及辅助机构;
6.所述警示机构包括、扬声器、警示灯、转动感应部以及传动行走部;
7.所述转动感应部设置在船型下壳体的上表面,所述扬声器以及警示灯均安装在船型下壳体上,所述传动行走部设置在船型下壳体的内部;
8.所述辅助机构用于辅助机器人稳定工作。
9.优选的,所述转动感应部包括第一旋转电机、转动杆、圆形壳体以及一对红外人体传感器;
10.所述第一旋转电机嵌装在船型下壳体的上表面,所述转动杆设置在第一旋转电机驱动端的上表面,所述圆形壳体安装在转动杆的上端,一对所述红外人体传感器嵌装在圆形壳体的壁面上。
11.优选的,所述辅助机构包括动力传动部以及能源供给部;
12.所述动力传动部包括一对第二旋转电机、一对转动杆二号以及一对螺旋桨;
13.一对所述第二旋转电机设置在船型下壳体的内部,一对所述转动杆二号的近端设置在第二旋转电机驱动端的侧表面,一对所述转动杆二号贯穿船型下壳体的下端与一对所述螺旋桨相连。
14.优选的,所述能源供给部包括太阳能电池板以及蓄电池;
15.所述蓄电池安装在船型下壳体的内部,所述太阳能电池板设置在船型下壳体上表面的一端。
16.优选的,所述圆形壳体内设有无线模块,所述圆形壳体上且位于一对所述红外人体传感器的下端安装有红外摄像头。
17.优选的,所述船型下壳体内安装有定时器。
18.优选的,所述扬声器上套有防护罩。
19.本实用新型具有以下的有益效果:
20.本装置操作简单,造价低廉,结构新颖,功能多样化,定时工作,减少了看管人员的劳动强度,也避免了钓鱼以及游泳爱好者,减少了危险的发生,自动补充能源,托管效果好。
附图说明
21.下面结合附图和具体实施方式对本实用新型作进一步详细说明。
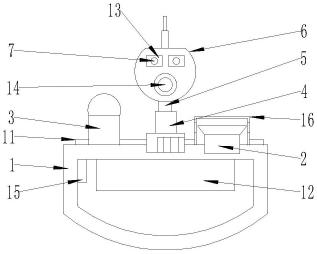
22.图1为本实用新型的一种水下警示机器人的结构示意图;
23.图2为本实用新型的一种水下警示机器人的侧视图;
24.图3为本实用新型的一种水下警示机器人的俯视图。
25.图中的附图标记表示为:
26.1、船型下壳体;2、扬声器;3、警示灯;4、第一旋转电机;5、转动杆;6、圆形壳体;7、红外人体传感器;8、第二旋转电机;9、转动杆二号;10、螺旋桨;11、太阳能电池板;12、蓄电池;13、无线模块;14、红外摄像头;15、定时器;16、防护罩。
具体实施方式
27.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
28.请参阅图1-3,一种水下警示机器人,包括船型下壳体1、设置在船型下壳体1上的警示机构以及辅助机构;
29.所述警示机构包括、扬声器2、警示灯3、转动感应部以及传动行走部;
30.所述转动感应部设置在船型下壳体1的上表面,所述扬声器2以及警示灯3均安装在船型下壳体1上,所述传动行走部设置在船型下壳体1的内部;
31.所述辅助机构用于辅助机器人稳定工作。
32.所述转动感应部包括第一旋转电机4、转动杆5、圆形壳体6以及一对红外人体传感器7;
33.所述第一旋转电机4嵌装在船型下壳体1的上表面,所述转动杆5设置在第一旋转电机4驱动端的上表面,所述圆形壳体6安装在转动杆5的上端,一对所述红外人体传感器7嵌装在圆形壳体6的壁面上。
34.所述辅助机构包括动力传动部以及能源供给部;
35.所述动力传动部包括一对第二旋转电机8、一对转动杆二号9以及一对螺旋桨10;
36.一对所述第二旋转电机8设置在船型下壳体1的内部,一对所述转动杆二号9的近端设置在第二旋转电机8驱动端的侧表面,一对所述转动杆二号9贯穿船型下壳体1的下端与一对所述螺旋桨10相连。
37.所述能源供给部包括太阳能电池板11以及蓄电池12;
38.所述蓄电池12安装在船型下壳体1的内部,所述太阳能电池板11设置在船型下壳体1上表面的一端。
39.所述圆形壳体6内设有无线模块13,所述圆形壳体6上且位于一对所述红外人体传感器7的下端安装有红外摄像头14。
40.所述船型下壳体1内安装有定时器15。
41.所述扬声器2上套有防护罩16。
42.工作原理:
43.首先需要把船型下壳体1放入到水面上,之后可以通过太阳能电池板11可以对蓄电池12补充电源,从而为装置内的电器元件提供能源.之后第二旋转电机8会带动转动杆二号9上的螺旋桨10带动船型下壳体1进行前进或者后退,第一旋转电机4会通过定时器15进行定时进行旋转,可以让红外人体传感器7以及红外摄像头14进行感应人体以及录像,当感知到人体时,可以通过警示灯3发出闪烁的灯光,并且伴有扬声器2的警告声。
44.显然,上述实施例仅仅是为清楚地说明所作的举例,而并非对实施方式的限定。对于所属领域的普通技术人员来说,在上述说明的基础上还可以做出其它不同形式的变化或变动。这里无需也无法对所有的实施方式予以穷举。而由此所引伸出的显而易见的变化或变动仍处于本发明创造的保护范围之中。
技术特征:
1.一种水下警示机器人,其特征在于,包括船型下壳体(1)、设置在船型下壳体(1)上的警示机构以及辅助机构;所述警示机构包括、扬声器(2)、警示灯(3)、转动感应部以及传动行走部;所述转动感应部设置在船型下壳体(1)的上表面,所述扬声器(2)以及警示灯(3)均安装在船型下壳体(1)上,所述传动行走部设置在船型下壳体(1)的内部;所述辅助机构用于辅助机器人稳定工作。2.根据权利要求1所述的一种水下警示机器人,其特征在于,所述转动感应部包括第一旋转电机(4)、转动杆(5)、圆形壳体(6)以及一对红外人体传感器(7);所述第一旋转电机(4)嵌装在船型下壳体(1)的上表面,所述转动杆(5)设置在第一旋转电机(4)驱动端的上表面,所述圆形壳体(6)安装在转动杆(5)的上端,一对所述红外人体传感器(7)嵌装在圆形壳体(6)的壁面上。3.根据权利要求1所述的一种水下警示机器人,其特征在于,所述辅助机构包括动力传动部以及能源供给部;所述动力传动部包括一对第二旋转电机(8)、一对转动杆二号(9)以及一对螺旋桨(10);一对所述第二旋转电机(8)设置在船型下壳体(1)的内部,一对所述转动杆二号(9)的近端设置在第二旋转电机(8)驱动端的侧表面,一对所述转动杆二号(9)贯穿船型下壳体(1)的下端与一对所述螺旋桨(10)相连。4.根据权利要求3所述的一种水下警示机器人,其特征在于,所述能源供给部包括太阳能电池板(11)以及蓄电池(12);所述蓄电池(12)安装在船型下壳体(1)的内部,所述太阳能电池板(11)设置在船型下壳体(1)上表面的一端。5.根据权利要求2所述的一种水下警示机器人,其特征在于,所述圆形壳体(6)内设有无线模块(13),所述圆形壳体(6)上且位于一对所述红外人体传感器(7)的下端安装有红外摄像头(14)。6.根据权利要求1所述的一种水下警示机器人,其特征在于,所述船型下壳体(1)内安装有定时器(15)。7.根据权利要求1所述的一种水下警示机器人,其特征在于,所述扬声器(2)上套有防护罩(16)。
技术总结
本实用新型为一种水下警示机器人,涉及机器人领域,解决了现有技术中的水库或者水产养殖基地无法人员长时间进行看管,难免出现违规者进行钓鱼以及游泳的问题。技术特征包括船型下壳体、设置在船型下壳体上的警示机构以及辅助机构;所述警示机构包括、扬声器、警示灯、转动感应部以及传动行走部;所述转动感应部设置在船型下壳体的上表面,所述扬声器以及警示灯均安装在船型下壳体上,所述传动行走部设置在船型下壳体的内部;所述辅助机构用于辅助机器人稳定工作。人稳定工作。人稳定工作。
技术研发人员:李东杰 何欢
受保护的技术使用者:青岛策海自动化科技有限公司
技术研发日:2022.02.22
技术公布日:2022/10/13
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1