一种周界安防机器人的制作方法
本技术属于智能安防设备,具体涉及一种周界安防机器人。
背景技术:
1、目前周界安防设施主要依靠安装红外、微波、雷达、激光等对射类报警装置、安装电子围栏、固定式监控报警设备(各类摄像头)、高压电网等设施设备,同时配以人工巡逻检查的方式开展确保安全防护。这种方式投入了大量的人力和物力资源却仍然存在许多漏洞,很难起到有效地安防效果。
2、在安防区域较大的场所,传动的固定式安防监测设备很容易出现探测角度不全面、视野有盲区等问题;而且当监测到入侵人员时,安防监测设备一般无法对入侵人员做出及时性地阻止行为,只能够进行被动地监视,从而很难对安防区域起到有效地保护。大范围的巡逻区域使得巡逻人员的工作强度大,加之巡逻人员巡逻时间无规律、巡逻频次低等问题,很容易造成不法分子有机可乘。
技术实现思路
1、针对上述的不足,本实用新型提供了一种周界安防机器人,通过设计与导轨匹配的移动机构,周界安防机器人沿导轨往复移动以使超声雷达、可见光摄像机、热成像摄像机以及打击装置能够对安防区域进行移动监控并分析识别入侵人员。其中,将可见光摄像机、热成像摄像机以及打击装置安装至可以转动的电动云台上,实现全方位监控及打击;打击装置与移动机构相互配合,实现对入侵人员的追击和打击;移动机构定时、定频次沿导轨进行巡逻,以使周界安防机器人取代人工巡逻,提高巡逻强度且降低成本,保障安防区域安防强度以防不法分子入侵。
2、本实用新型是通过以下技术方案实现的:
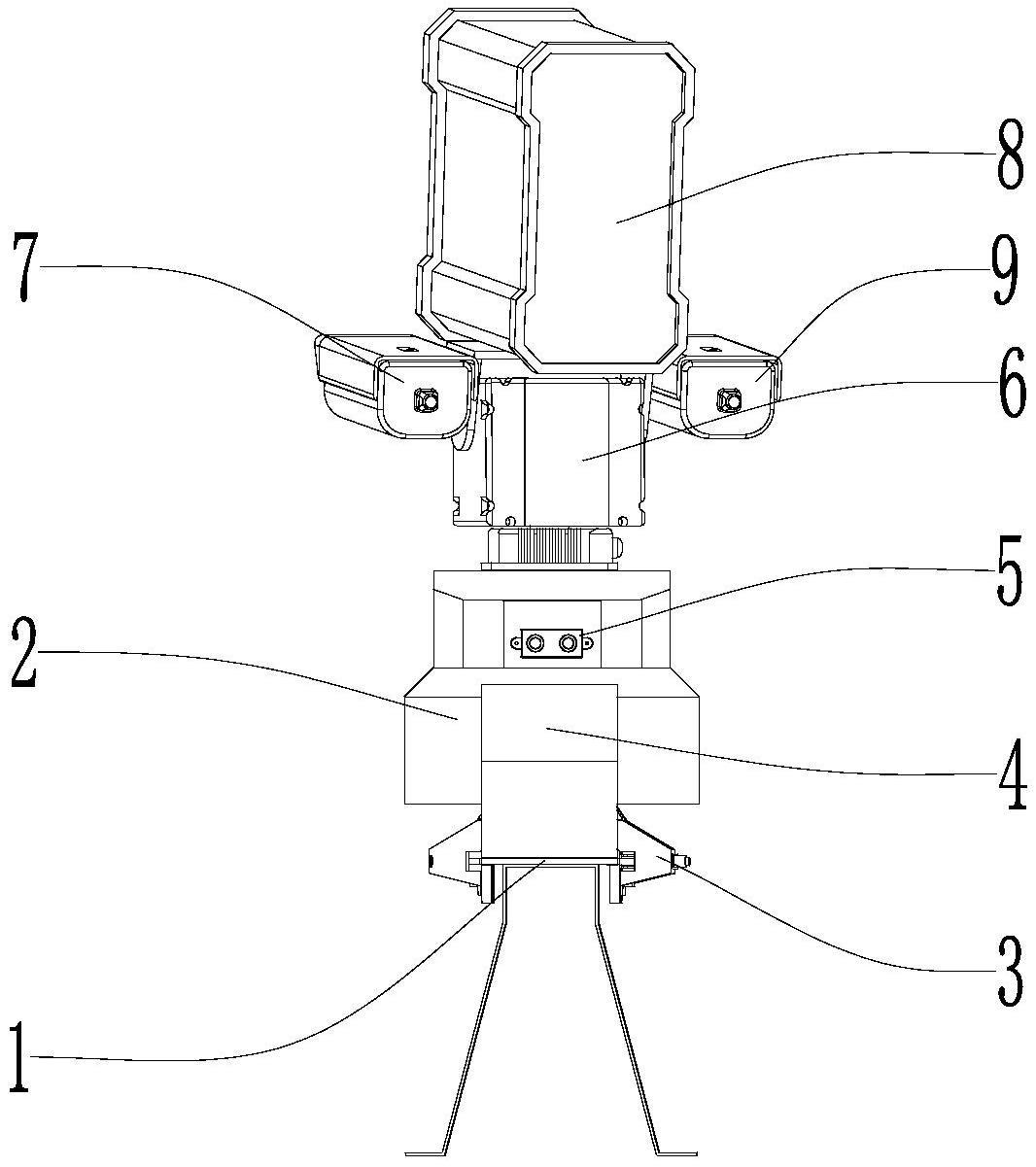
3、一种周界安防机器人,安装至位于安防区域的导轨,周界安防机器人包括核心组件仓、位于核心组件仓底部且安装至导轨的移动机构、嵌入核心组件仓内的移动电源、凸出于核心组件仓后方且与导轨端部的充电桩配合的充电插头、安装至核心组件仓前方和后方的超声雷达、固定至核心组件仓顶部的电动云台、安装至电动云台且呈枪机状的可见光摄像机和热成像摄像机以及位于电动云台上方的打击装置;电动云台包括固定至核心组件仓顶部的旋转底座、位于旋转底座上方的机体以及与机体铰接且顶部固定有打击装置的转向架,转向架上安装有可见光摄像机和热成像摄像机。电动云台内部具有控制周界安防机器人运行的控制装置。周界安防机器人沿安防区域定时、定频次、全方位且具有打击性地进行巡逻,提高安防区域的安防强度。
4、进一步地,导轨上安装有两个周界安防机器人且导轨两端均固定有充电桩,两个周界安防机器人交替运行,实现24小时巡逻作业。
5、进一步地,导轨远离周界安防机器人的一侧固定有导轨支架,导轨支架对导轨具有支撑连接作用。移动机构包括连接架以及抵接至导轨的驱动轮,连接架两侧均固定有夹持导轨的导向组件,各导向组件均包括位于导轨上方且抵接至导轨的上导向轮、位于导轨下方且抵接至导轨的下导向轮以及侧导向轮,以实现移动机构与导轨的稳固连接,保证移动机构沿导轨顺利运行,防止移动机构运行过程中脱离导轨。
6、进一步地,移动机构的巡逻速度为1m/s,移动机构的最高速度为5m/s,当周界安防机器在巡逻中发现人员侵入时,控制装置控制移动机构进行提速并控制移动机构沿导轨向靠近入侵人员的方向移动。通过提高移动速度以实现对入侵人员的快速追击。
7、进一步地,超声雷达的探测距离为1.8m,超声雷达与移动机构信号连接,当超声雷达检测到障碍物时向移动机构发出停止信号,移动机构与障碍物之间的制动距离大于0.5m,以防止周界安防机器人与障碍物发生碰撞。
8、进一步地,可见光摄像机内具有识别模块,当周界安防机器人处于第一场景时,通过可见光摄像机获取信息,当周界安防机器人处于第二场景时,通过热成像摄像机和可见光摄像机获取信息,其中,第一场景为周界安防机器人所处环境的能见度大于预设阈值,第二场景为周界安防机器人所处环境的能见度等于或小于预设预设阈值。
9、进一步地,周界安防机器人还包括遥控装置,遥控装置与控制装置信号连接,实现人为对周界安防机器人进行操控。
10、进一步地,控制装置与安防报警装置信号连接,通过与传统的安防报警装置连接,增加周界安防机器人的适用性,提高安防区域的安防强度,降低安防设备的成本。
11、进一步地,周界安防机器人还包括识别模块,可见光摄像机和热成像摄像机均与识别模块信号连接,以使周界安防机器人能够对入侵人员进行识别。
技术特征:
1.一种周界安防机器人,其特征在于,安装至位于安防区域的导轨,所述周界安防机器人包括核心组件仓、位于所述核心组件仓底部且安装至所述导轨的移动机构、嵌入所述核心组件仓内的移动电源、凸出于所述核心组件仓后方且与所述导轨端部的充电桩配合的充电插头、安装至所述核心组件仓前方和后方的超声雷达、固定至所述核心组件仓顶部的电动云台、安装至所述电动云台且呈枪机状的可见光摄像机和热成像摄像机以及位于所述电动云台上方的打击装置;
2.根据权利要求1所述的一种周界安防机器人,其特征在于,所述导轨上安装有两个所述周界安防机器人且所述导轨两端均固定有所述充电桩,两个所述周界安防机器人交替运行。
3.根据权利要求1所述的一种周界安防机器人,其特征在于,所述导轨远离所述周界安防机器人的一侧固定有导轨支架,所述移动机构包括连接架以及抵接至所述导轨的驱动轮,所述连接架两侧均固定有夹持所述导轨的导向组件,各所述导向组件均包括位于所述导轨上方且抵接至所述导轨的上导向轮、位于所述导轨下方且抵接至所述导轨的下导向轮以及侧导向轮。
4.根据权利要求1所述的一种周界安防机器人,其特征在于,所述移动机构的巡逻速度为1m/s,所述移动机构的最高速度为5m/s。
5.根据权利要求1所述的一种周界安防机器人,其特征在于,所述超声雷达的探测距离为1.8m,所述超声雷达与所述移动机构信号连接,当所述超声雷达检测到障碍物时向所述移动机构发出停止信号,所述移动机构与障碍物之间的制动距离大于0.5m。
6.根据权利要求1所述的一种周界安防机器人,其特征在于,所述可见光摄像机内具有识别模块,当所述周界安防机器人处于第一场景时,通过所述可见光摄像机获取信息,当所述周界安防机器人处于第二场景时,通过所述热成像摄像机和所述可见光摄像机获取信息,其中,所述第一场景为所述周界安防机器人所处环境的能见度大于预设阈值,所述第二场景为所述周界安防机器人所处环境的能见度等于或小于预设预设阈值。
7.根据权利要求1所述的一种周界安防机器人,其特征在于,还包括遥控装置,所述遥控装置与所述控制装置信号连接。
8.根据权利要求1所述的一种周界安防机器人,其特征在于,所述控制装置与安防报警装置信号连接。
9.根据权利要求1所述的一种周界安防机器人,其特征在于,所述周界安防机器人还包括识别模块,所述可见光摄像机和所述热成像摄像机均与所述识别模块信号连接。
技术总结
本技术公开了一种周界安防机器人,安装至位于安防区域的导轨,周界安防机器人包括核心组件仓、位于核心组件仓底部且安装至导轨的移动机构、嵌入核心组件仓内的移动电源、凸出于核心组件仓后方且与导轨端部的充电桩配合的充电插头、安装至核心组件仓前方和后方的超声雷达、固定至核心组件仓顶部的电动云台、安装至电动云台两侧且呈枪机状的可见光摄像机、热成像摄像机以及位于电动云台上方的打击装置;电动云台包括固定至核心组件仓顶部的旋转底座、位于旋转底座上方的机体以及与机体铰接且顶部固定有打击装置的转向架。周界安防机器人沿安防区域定时、定频次、全方位且具有打击性地进行巡逻,提高安防区域的安防强度。
技术研发人员:刘庆北
受保护的技术使用者:山东国威系统集成有限公司
技术研发日:20221214
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!