路径生成装置和路径生成方法与流程
本发明涉及一种生成具有自动驾驶功能、驾驶辅助功能的车辆的目标路径的路径生成装置和路径生成方法。
背景技术:
1、以往已知有生成自动驾驶车辆的目标路径的装置(参见例如专利文献1)。在专利文献1记载的装置中,使用相机或雷达传感器识别行驶车道的左右两侧的道路划线的位置,求出左右的道路划线上的相对的2点的中心点,将多个中心点连接起来,由此生成目标路径。
2、通过具有自动驾驶功能、驾驶辅助功能的车辆的普及,能够提高整个交通社会的安全性、便利性,实现可持续的运输系统。另外,通过提高运输的效率性、顺畅性,能够削减co2排放量,减轻对环境的负荷。
3、但是,在本车道处于拥堵中而相邻车道不拥堵时,如专利文献1记载的装置,当仅沿着本车道的中心生成目标路径时,乘员有可能会因其他车辆通过本车辆的侧方而感到不安。
4、现有技术文献
5、专利文献
6、专利文献1:日本特开2018-118589号公报(jp2018-118589a)。
技术实现思路
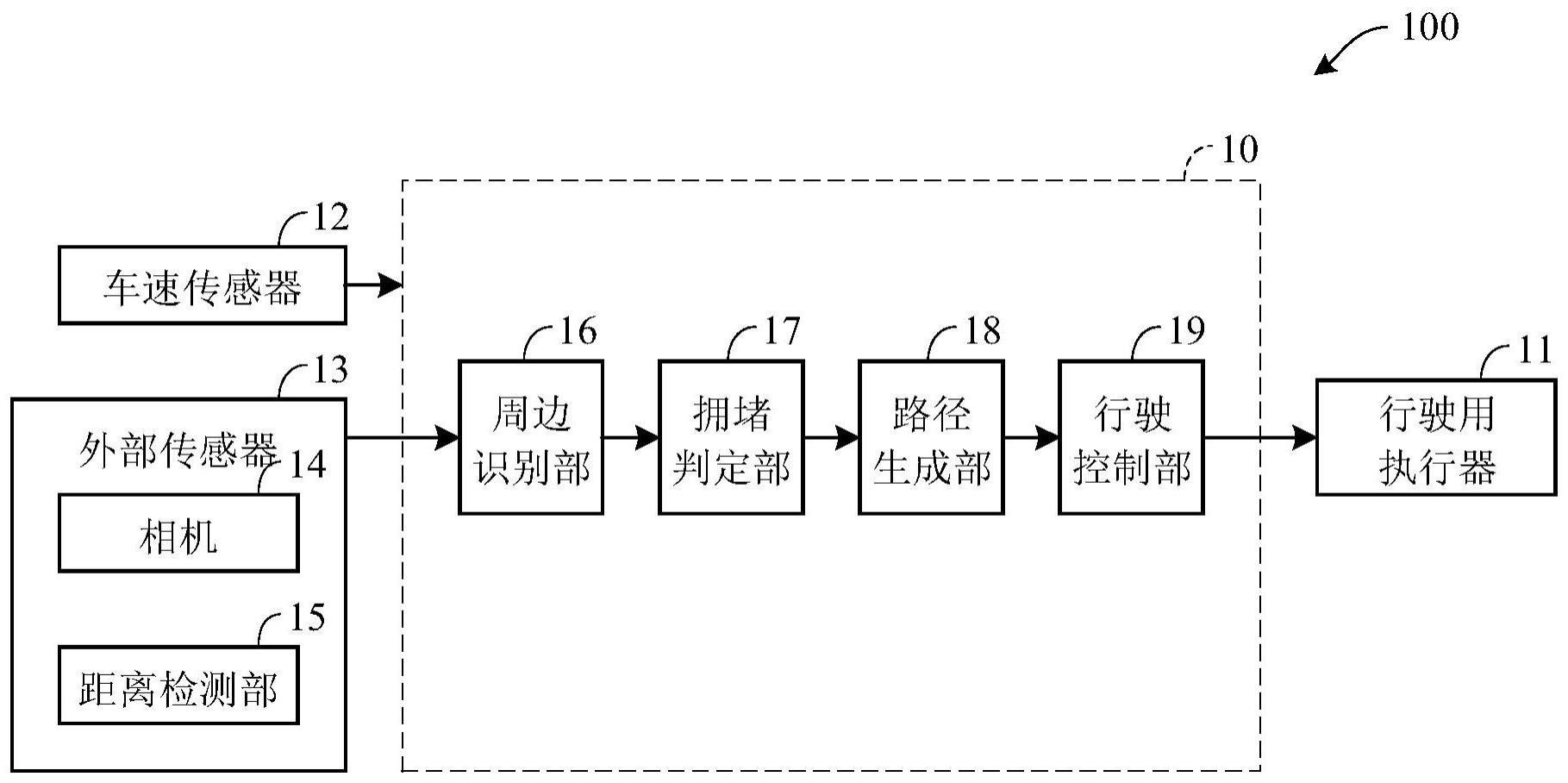
1、本发明的一技术方案的路径生成装置具备:速度信息取得部,其取得在本车道行驶的本车辆的速度信息;检测部,其检测本车辆的周边区域的物体;周边识别部,其识别由检测部检测出的物体中在与本车道相邻的相邻车道行驶的相邻车辆;拥堵判定部,其根据由速度信息取得部取得的速度信息判定本车道是否拥堵,并且根据周边识别部的识别结果判定相邻车道是否拥堵;以及路径生成部,其生成本车辆的目标路径。路径生成部在由拥堵判定部判定为本车道拥堵且判定为相邻车道不拥堵时,与判定为本车道拥堵且判定为相邻车道拥堵时相比较,靠远离相邻车道侧生成目标路径。
2、本发明的另一技术方案为生成在本车道行驶的本车辆的目标路径的路径生成方法,包括:识别由检测部检测出的本车辆的周边区域的物体中在与本车道相邻的相邻车道行驶的相邻车辆,根据本车辆的速度判定本车道是否拥堵并且根据相邻车辆的识别结果判定相邻车道是否拥堵,生成本车辆的目标路径。生成目标路径包括:在判定为本车道拥堵且判定为相邻车道不拥堵时,与判定为本车道拥堵且判定为相邻车道拥堵时相比较,靠远离相邻车道侧生成目标路径。
技术特征:
1.一种路径生成装置(100),其特征在于,具备:
2.根据权利要求1所述的路径生成装置(100),其特征在于,
3.根据权利要求1或2所述的路径生成装置(100),其特征在于,
4.根据权利要求1或2所述的路径生成装置(100),其特征在于,
5.根据权利要求1或2所述的路径生成装置(100),其特征在于,还具备行驶控制部(19),所述行驶控制部(19)控制行驶用执行器(11),以对本车辆(1)的驾驶员进行驾驶辅助或使本车辆(1)自动驾驶,
6.根据权利要求1或2所述的路径生成装置(100),其特征在于,
7.根据权利要求1或2所述的路径生成装置(100),其特征在于,
8.一种路径生成方法,为生成在本车道行驶的本车辆(1)的目标路径的路径生成方法,包括:
9.根据权利要求8所述的路径生成方法,其特征在于,
10.根据权利要求8或9所述的路径生成方法,其特征在于,
11.根据权利要求8或9所述的路径生成方法,其特征在于,
12.根据权利要求8或9所述的路径生成方法,其特征在于,
13.根据权利要求8或9所述的路径生成方法,其特征在于,
14.根据权利要求8或9所述的路径生成方法,其特征在于,
技术总结
本发明提供一种路径生成装置(100),具备:速度信息取得部,其取得在本车道行驶的本车辆(1)的速度信息;检测部(13),其检测本车辆(1)的周边区域的物体;周边识别部(16),其识别由检测部(13)检测出的物体中在与本车道相邻的相邻车道行驶的相邻车辆;拥堵判定部(17),其根据由速度信息取得部取得的速度信息判定本车道是否拥堵,并根据周边识别部(16)的识别结果判定相邻车道是否拥堵;以及路径生成部(18),其生成本车辆(1)的目标路径。路径生成部(18)在由拥堵判定部(17)判定为本车道拥堵且判定为相邻车道不拥堵时,与判定为本车道拥堵且判定为相邻车道拥堵时相比较,靠远离相邻车道侧生成目标路径。
技术研发人员:富冈一贵,久保田裕康
受保护的技术使用者:本田技研工业株式会社
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!