道路状态预警方法、装置、车辆及存储介质与流程
本发明涉及智能驾驶,具体而言,涉及一种道路状态预警方法、装置、车辆及存储介质。
背景技术:
1、智能网联主流高级驾驶辅助系统和高级别自动驾驶,其道路情况检测主要利用深度摄像头和激光雷达,关注目标检测,其感知方法一般依赖于神经网络模型。主要用于识别车道线和道路边缘,实现行为预测、路线规划控制,重点在于实现行驶方向和横向的辅助驾驶或自动驾驶,垂直方向的舒适性则未充分考虑。而实际上,道路垂直方向的异常情况也可对车辆带来较大危害,对驾驶人的驾驶状态产生较大影响,最终体现在影响驾驶安全。
2、道路垂直方向上的异常情况包括坑洼、裂缝、鼓包、断头路、不平整、临时异物等,在车辆垂直方向可产生巨大加速度,轻则极大降低驾乘舒适度或降低车辆寿命,重则导致偏离正常行驶路线或直接颠覆,造成重大交通事故。在辅助驾驶和自动驾驶领域,神经网络算法常用于车辆、行人、锥桶等目标检测。在目前的道路状态预警方法中,采用的神经网络算法的有效性依赖于被检测物特征的可提取性,道路异物和坑洼的形态一般不具备共有特征,采用神经网络算法的有效性会打折扣,对道路状态检测不够准确,进而使预警方法输出的预警结果不够准确。
技术实现思路
1、本发明实施例提供了一种道路状态预警方法、装置、车辆及存储介质,以至少解决当前的道路状态预警方法中,对道路状态检测不够准确,进而使预警方法输出的预警结果不够准确的技术问题。
2、根据本发明实施例的第一个方面,提供了一种道路状态预警方法,包括:
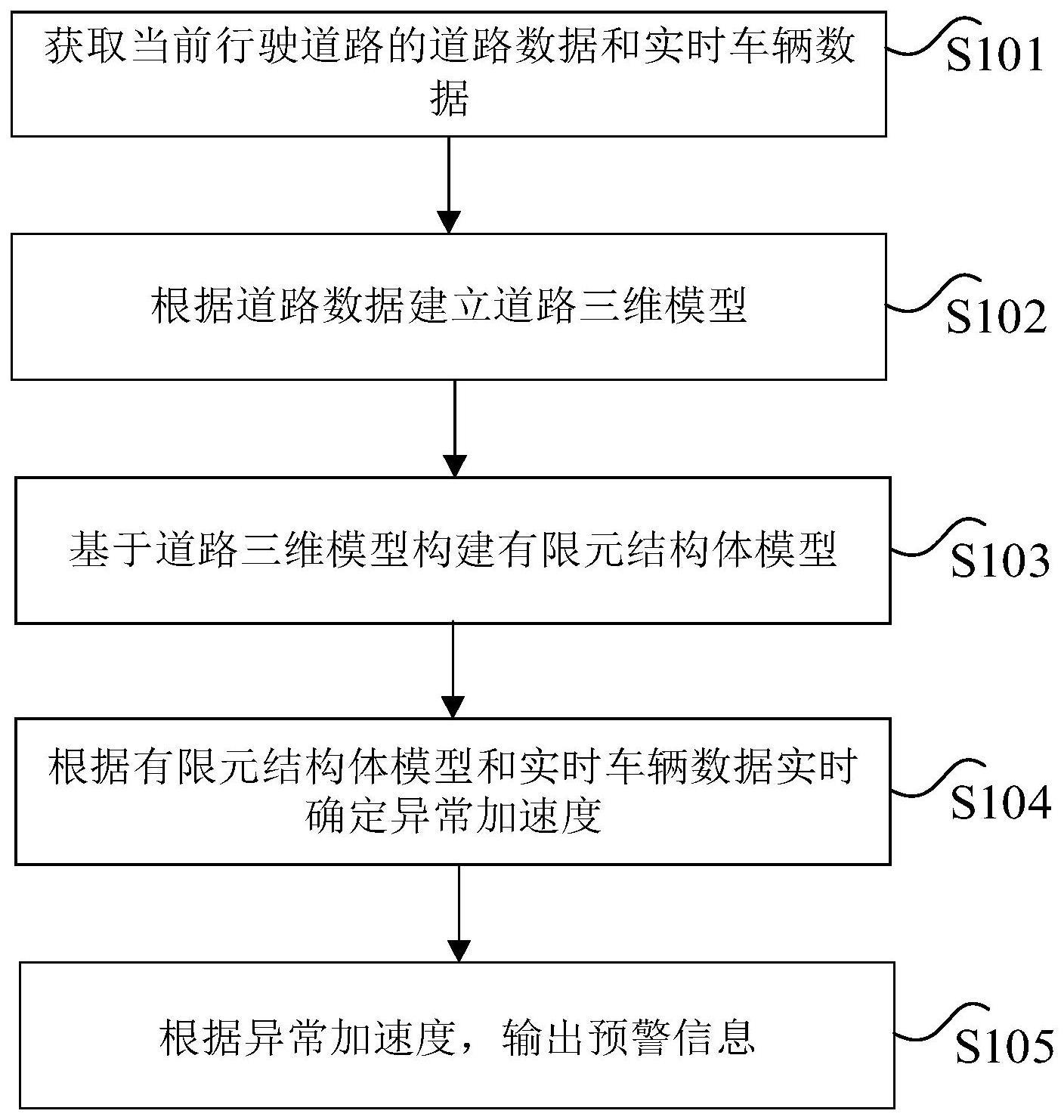
3、获取当前行驶道路的道路数据和实时车辆数据,道路数据包括视频数据和/或点云数据;根据道路数据建立道路三维模型;基于道路三维模型构建有限元结构体模型;根据有限元结构体模型和实时车辆数据实时确定异常加速度,其中,异常加速度为当前行驶道路异常导致的车辆加速度;根据异常加速度,输出预警信息。
4、可选的,根据道路数据建立道路三维模型包括:对道路数据的数据类型进行判断;响应于道路数据的数据类型为视频类型,对视频数据进行异常帧处理得到建模视频数据,其中,视频数据为视频类型的数据;根据建模视频数据建立道路三维模型。
5、可选的,根据道路数据建立道路三维模型包括:响应于道路数据的数据类型为点云类型,对点云数据进行异常点剔除和曲面拟合处理得到建模点云数据,其中,点云数据为点云类型的数据;根据建模点云数据建立道路三维模型。
6、可选的,根据道路数据建立道路三维模型还包括:响应于道路数据的数据类型包括视频类型和点云类型,根据视频数据构建第一三维模型;根据点云数据构建第二三维模型;利用第二三维模型校验并优化第一三维模型得到道路三维模型。
7、可选的,根据道路数据建立道路三维模型还包括:获取导航数据和地图数据;根据导航数据、地图数据和实时车辆数据确定行驶重点区域;根据行驶重点区域对应的道路数据,建立道路三维模型。
8、可选的,预警信息包括颠簸等级和安全速度,其中,颠簸等级用于表征车辆的晃动程度,安全速度为推荐车辆通过当前行驶道路的速度;根据异常加速度,输出预警信息包括:根据异常加速度确定颠簸等级;根据实时车辆数据和异常加速度确定安全速度;输出颠簸等级和安全速度。
9、可选的,道路状态预警方法还包括:对视频数据和/或点云数据进行筛选得到异常数据;根据异常数据确定道路异常情况;根据道路异常情况输出辅助预警信息,辅助预警信息用于对预警信息进行补充。
10、根据本发明实施例的第二方面,还提供了一种道路状态预警装置,包括:
11、获取模块,获取模块用于获取当前行驶道路的道路数据和实时车辆数据,道路数据包括视频数据和/或点云数据;第一构建模块,第一构建模块用于根据道路数据建立道路三维模型;第二构建模块,第二构建模块用于基于道路三维模型构建有限元结构体模型;确定模块,确定模块用于根据有限元结构体模型和实时车辆数据实时确定异常加速度,其中,异常加速度为当前行驶道路异常导致的车辆加速度;输出模块,输出模块用于根据异常加速度,输出预警信息。
12、可选的,第一构建模块还用于:对道路数据的数据类型进行判断;响应于道路数据的数据类型为视频类型,对视频数据进行异常帧处理得到建模视频数据,其中,视频数据为视频类型的数据;根据建模视频数据建立道路三维模型。
13、可选的,第一构建模块还用于:响应于道路数据的数据类型为点云类型,对点云数据进行异常点剔除和曲面拟合处理得到建模点云数据,其中,点云数据为点云类型的数据;根据建模点云数据建立道路三维模型。
14、可选的,第一构建模块还用于:响应于道路数据的数据类型包括视频类型和点云类型,根据视频数据构建第一三维模型;根据点云数据构建第二三维模型;利用第二三维模型校验并优化第一三维模型得到道路三维模型。
15、可选的,第一构建模块还用于:获取导航数据和地图数据;根据导航数据、地图数据和实时车辆数据确定行驶重点区域;根据行驶重点区域对应的道路数据,建立道路三维模型。
16、可选的,预警信息包括颠簸等级和安全速度,其中,颠簸等级用于表征车辆的晃动程度,安全速度为推荐车辆通过当前行驶道路的速度;输出模块还用于:根据异常加速度确定颠簸等级;根据实时车辆数据和异常加速度确定安全速度;输出颠簸等级和安全速度。
17、可选的,道路状态预警装置还包括辅助模块,辅助模块用于:对视频数据和/或点云数据进行筛选得到异常数据;根据异常数据确定道路异常情况;根据道路异常情况输出辅助预警信息,辅助预警信息用于对预警信息进行补充。
18、根据本发明实施例的第三方面,还提供了一种车辆,车辆包括存储器和处理器,存储器中存储有计算机程序,处理器被设置为运行计算机程序以执行上述第一方面中任一项中的道路状态预警方法。
19、根据本发明实施例的第四方面,还提供了一种非易失性存储介质,非易失性存储介质中存储有计算机程序,其中,计算机程序被设置为在计算机或处理器上运行时,执行上述第一方面中任一项中的道路状态预警方法。
20、在本发明实施例中,首先获取当前行驶道路的道路数据和实时车辆数据,道路数据包括视频数据和/或点云数据,然后根据道路数据建立道路三维模型,再基于道路三维模型构建有限元结构体模型,再根据有限元结构体模型和实时车辆数据实时确定异常加速度,其中,异常加速度为当前行驶道路异常导致的车辆加速度,最后根据异常加速度,输出预警信息。本发明通过构建有限元结构体模型可以精确地表达道路状态,根据精确的道路状态,确定异常加速度,最终根据异常加速度输出预警信息,进而可以解决当前的道路状态预警方法中,对道路状态检测不够准确,进而使预警方法输出的预警结果不够准确的技术问题。
技术特征:
1.一种道路状态预警方法,应用于车辆,其特征在于,包括:
2.根据权利要求1所述的道路状态预警方法,其特征在于,所述根据所述道路数据建立道路三维模型包括:
3.根据权利要求2所述的道路状态预警方法,其特征在于,所述根据所述道路数据建立道路三维模型还包括:
4.根据权利要求2所述的道路状态预警方法,其特征在于,所述根据所述道路数据建立道路三维模型还包括:
5.根据权利要求1所述的道路状态预警方法,其特征在于,所述根据所述道路数据建立道路三维模型包括:
6.根据权利要求1所述的道路状态预警方法,其特征在于,所述预警信息包括颠簸等级和安全速度,其中,所述颠簸等级用于表征车辆的晃动程度,所述安全速度为推荐所述车辆通过所述当前行驶道路的速度;
7.根据权利要求1所述的道路状态预警方法,其特征在于,还包括:
8.一种道路状态预警装置,其特征在于,包括:
9.一种车辆,包括存储器和处理器,其特征在于,所述存储器中存储有计算机程序,所述处理器被设置为运行所述计算机程序以执行上述权利要求1至7任一项中所述的道路状态预警方法。
10.一种非易失性存储介质,其特征在于,所述非易失性存储介质中存储有计算机程序,其中,所述计算机程序被设置为在计算机或处理器上运行时,执行上述权利要求1至7任一项中所述的道路状态预警方法。
技术总结
本发明公开了一种道路状态预警方法、装置、车辆及存储介质,所涉及的技术领域为汽车控制技术领域。其中,道路状态预警方法包括:获取当前行驶道路的道路数据和实时车辆数据,道路数据包括视频数据和/或点云数据;根据道路数据建立道路三维模型;基于道路三维模型构建有限元结构体模型;根据有限元结构体模型和实时车辆数据实时确定异常加速度,其中,异常加速度为当前行驶道路异常导致的车辆加速度;根据异常加速度,输出预警信息。本发明解决了当前的道路状态预警方法中,对道路状态检测不够准确,进而使预警方法输出的预警结果不够准确的技术问题。
技术研发人员:易强,陈博,尹荣彬,李兵,王秋,衣春雷,王温锐
受保护的技术使用者:中国第一汽车股份有限公司
技术研发日:
技术公布日:2024/1/11
- 还没有人留言评论。精彩留言会获得点赞!