一种机器人与中央智能控制通讯中断时的交通保护机制的制作方法
本发明涉及机器人,尤其涉及一种机器人与中央智能控制通讯中断时的交通保护机制。
背景技术:
1、在近几年的发展中,通过移动机器人货物存储器分拣等相关技术使得库存货物存储和检索的速度和效率、自动化程度已经得到了极大的提升,一般通过机器人智能控制系统控制所有移动机器人的运动。
2、一般的机器人智能控制系统与机器人之间都是靠网络通信的,然而现有技术缺乏通信中断下的保护机制,当出现网络问题时,一台或者多台机器人同时执行任务时,会出现机器人不可控的情况,造成交通失控,进而引发交通事故。
技术实现思路
1、本发明提供了一种机器人与中央智能控制通讯中断时的交通保护机制,以实现对机器人的交通管控。
2、根据本发明的第一方面,提供了一种机器人与中央智能控制通讯中断时的交通保护机制,应用于中央服务器,包括:
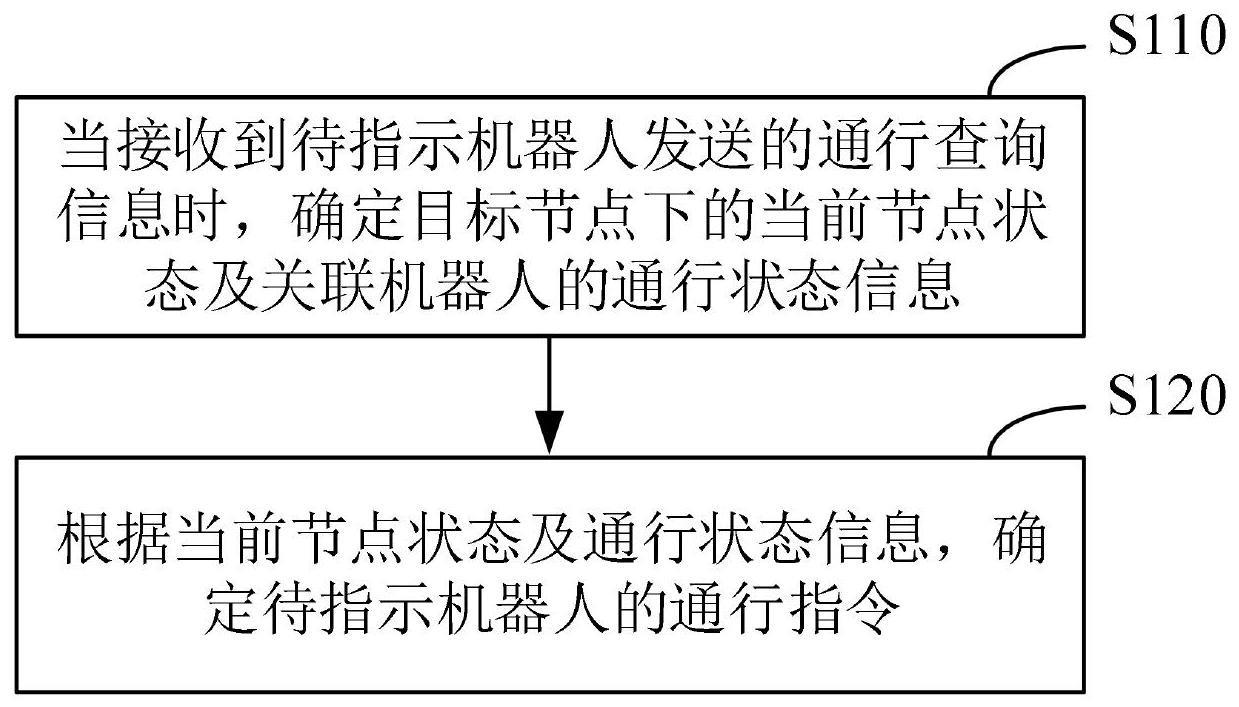
3、当接收到待指示机器人发送的通行查询信息时,其中,所述待指示机器人在预先规划的行走路线中处于节点类型为交通节点的目标节点下,
4、确定所述目标节点下的当前节点状态及关联机器人的通行状态信息;
5、根据所述当前节点状态及所述通行状态信息,确定所述待指示机器人的通行指令。
6、根据本发明的第二方面,提供了一种机器人与中央智能控制通讯中断时的交通保护机制,应用于机器人,包括:
7、当接收到规划的行走路线时,获取所述行走路线对应的节点信息;
8、根据所述节点信息,对所述行走路线中的各节点的节点类型进行标记;
9、根据所述节点类型及与中央服务器的当前通讯状态,确定在各所述节点下的通行方式。
10、根据本发明的第三方面,提供了一种机器人的通行控制系统,包括中央服务器和至少一个机器人,所述中央服务器包括:
11、状态确定模块,用于当接收到待指示机器人发送的通行查询信息时,其中,所述待指示机器人在预先规划的行走路线中处于节点类型为交通节点的目标节点下,确定所述目标节点下的当前节点状态及关联机器人的通行状态信息;
12、指令确定模块,用于根据所述当前节点状态及所述通行状态信息,确定所述待指示机器人的通行指令;
13、处于行走路线中,作为待确定通行方式的机器人,包括:
14、信息获取模块,用于当接收到规划的行走路线时,获取所述行走路线对应的节点信息;
15、节点标记模块,用于根据所述节点信息,对所述行走路线中的各节点的节点类型进行标记;
16、方式确定模块,用于根据所述节点类型及与中央服务器的当前通讯状态,确定在各所述节点下的通行方式。
17、根据本发明的第四方面,提供了一种电子设备,作为本发明所提供系统中的中央服务器或机器人,所述电子设备包括:
18、至少一个处理器;以及
19、与所述至少一个处理器通信连接的存储器;其中,
20、所述存储器存储有可被所述至少一个处理器执行的计算机程序,所述计算机程序被所述至少一个处理器执行,以使所述至少一个处理器能够执行本发明任一实施例所述的机器人与中央智能控制通讯中断时的交通保护机制。
21、根据本发明的另一方面,提供了一种计算机可读存储介质,所述计算机可读存储介质存储有计算机指令,所述计算机指令用于使处理器执行时实现本发明任一实施例所述的机器人与中央智能控制通讯中断时的交通保护机制。
22、本发明实施例的技术方案,该方法应用于中央服务器,包括:当接收到待指示机器人发送的通行查询信息时,其中,待指示机器人在预先规划的行走路线中处于节点类型为交通节点的目标节点下,确定目标节点下的当前节点状态及关联机器人的通行状态信息;根据当前节点状态及通行状态信息,确定待指示机器人的通行指令。通过在行走路线中对各节点的类型进行分类,并结合各节点下机器人的通行状态信息及当前节点状态,对待指示机器人及关联机器人进行统一调度管理,规避了因网络中断、通行资源唯一性或道路狭窄引发的交通事故,保证了机器人间的通行安全。
23、应当理解,本部分所描述的内容并非旨在标识本发明的实施例的关键或重要特征,也不用于限制本发明的范围。本发明的其它特征将通过以下的说明书而变得容易理解。
技术特征:
1.一种机器人与中央智能控制通讯中断时的交通保护机制,其特征在于,应用于中央服务器,包括:
2.根据权利要求1所述的方法,其特征在于,所述节点类型的确定步骤,包括:
3.根据权利要求1所述的方法,其特征在于,所述根据所述当前节点状态及所述通行状态信息,确定所述待指示机器人的通行指令,包括:
4.根据权利要求3所述的方法,其特征在于,所述根据所述当前节点状态及所述通行顺序,确定所述待指示机器人的通行指令,包括:
5.一种机器人与中央智能控制通讯中断时的交通保护机制,其特征在于,应用于机器人,包括:
6.根据权利要求5所述的方法,其特征在于,所述根据所述节点类型及与中央服务器的当前通讯状态,确定在各所述节点下的通行方式,包括:
7.一种机器人的通行控制系统,其特征在于,包括中央服务器和至少一个机器人,所述中央服务器包括:
8.根据权利要求7所述的系统,其特征在于,所述方式确定模块具体用于:
9.一种电子设备,作为权利要求7所提供系统中的中央服务器或机器人,其特征在于,所述电子设备包括:
10.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质存储有计算机指令,所述计算机指令用于使处理器执行时实现权利要求1-6中任一项所述的机器人与中央智能控制通讯中断时的交通保护机制。
技术总结
本发明公开了一种机器人与中央智能控制通讯中断时的交通保护机制。该方法应用于中央服务器,包括:当接收到待指示机器人发送的通行查询信息时,其中,待指示机器人在预先规划的行走路线中处于节点类型为交通节点的目标节点下,确定目标节点下的当前节点状态及关联机器人的通行状态信息;根据当前节点状态及通行状态信息,确定待指示机器人的通行指令。通过在行走路线中对各节点的类型进行分类,并结合各节点下机器人的通行状态信息及当前节点状态,对待指示机器人及关联机器人进行统一调度管理,规避了因网络中断、通行资源唯一性或道路狭窄引发的交通事故,保证了机器人间的通行安全。
技术研发人员:吴季泳,朱悦,郭锐,刘玉超
受保护的技术使用者:塔米智能科技(北京)有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!