确定停车区域布局的方法与流程
本公开涉及用于确定用于停车区域的布局的由计算机实现的方法。停车区域可以是停车场或停车场的分区。这样的方法可以例如由载具以自动方式或部分自动方式用于确定停车区域布局并且基于停车区域布局控制载具在停车区域内移动。
背景技术:
1、在汽车领域中,已经开发了停车系统来控制载具以自动方式或部分自动方式执行停车操纵。停车系统依赖于多个传感器,例如视觉传感器、激光雷达传感器、雷达传感器、全球导航卫星系统(gnss)以及感知栈(perception stack),来收集关于载具周围环境的信息,并检测空闲或未占用的停车位,也称为停车空间。在检测到并确认了空闲停车位时,停车系统开始规划停车操纵,然后至少部分地控制载具以执行所规划的停车操纵。
2、在规划停车操纵之前,停车系统累积来自感知栈的占用证据,对占用证据进行后处理以检测占用空间之间的间隙并将检测到的间隙分类为停车位。在检测到停车位之后,跟踪该停车位占用状态,并且如果该停车位未被占用,则规划路径来执行停车操纵以将载具停放在未被占用的停车位中。
3、现有的停车系统在控制载具以执行自动或部分自动的停车操纵方面是有效的。然而,其具有长等待时间。所实施的用于规划停车操纵的算法必须等待确认所检测到的间隙未被占用并且能够适合载具,这通常可以仅在经过该间隙之后执行。结果,显著增加了由停车系统控制的停车操纵的总执行时间。
4、本公开允许改善该情况。特别地,需要便于载具在停车区域中的操纵。
技术实现思路
1、本公开涉及一种确定用于停车区域的布局的由计算机实现的方法,所述方法包括以下步骤:
2、当载具在所述停车区域中移动时,根据由所述载具的感测系统提供的感测数据确定与所述载具的周围环境相关的环境信息;
3、通过执行以下步骤来确定用于所述停车区域的布局:
4、提取与从所述环境信息识别的停车位相关联的一个或更多个参数;
5、至少基于所提取的一个或更多个参数来确定用于所述停车区域的一个或更多个布局模型,各个布局模型包括底层停车位模板;
6、向所确定的各布局模型分配(s9)置信度得分,所述置信度得分指示相应的底层停车位模板多么匹配与从所述环境信息识别的所述停车位相关联的所述一个或更多个参数;以及
7、选择所述停车区域的具有最高置信度得分的布局模型作为用于确定用于所述停车区域的所述布局的当前布局模型,
8、其中,所选择的布局模型基于分配给该布局模型的根据在载具移动时收集的传感器数据生成的置信度得分随时间更新。
9、所确定的停车区域布局可用于控制载具的一个或更多个功能。例如,所确定的停车区域布局可由载具的路径规划模块使用,以较好地为载具规划停车区域内的轨迹。可控制载具以自动方式或至少部分自动方式沿规划轨迹移动。这允许载具在停车区域中的较快、较平滑和较安全的操纵。
10、有利地,所确定的用于所述停车区域的所述布局被用于控制所述载具的驾驶轨迹和/或高级驾驶员辅助系统(adas)控制功能。
11、例如,该方法可以还包括控制载具以自动方式或部分自动方式沿着使用所确定的停车区域布局规划的驾驶轨迹移动的步骤。
12、在实施方式中,所述方法可以还包括以下步骤:向所述停车区域的所述布局的多个停车位单元中的各停车位单元分配指示该停车位的占用概率的占用状态得分,以及基于所述环境信息更新所述占用状态得分。
13、在实施方式中,除非所述环境信息提供该停车位单元的占用指示,否则可以默认地将指示未占用状态的得分分配给所述停车区域的所述布局的多个停车位单元中的各停车位单元。
14、有利地,该方法可以还包括基于分配给所述多个停车位单元中的各停车位单元的所述占用状态得分来识别未占用停车位的步骤,以及确定在所识别的未占用停车位中停放所述载具的停车操纵的步骤。所述方法可以还包括控制载具以自动方式或部分自动方式执行所设定的停车操纵的步骤。
15、通过使用基于布局模型构建的停车区域布局来识别未占用停车位允许减少停车操纵等待时间。换言之,显著减少了由载具以自动方式或部分自动方式执行的停车操纵的执行时间。可以比现有技术中早地执行未被占用的停车位的检测,因为不再需要经过未被占用的停车位来开始停车操纵。此外,通过为载具规划较平滑和较简单的轨迹可以显著简化停车操纵。
16、本方法的另一优点在于不要求特定传感器和/或特定感知装置。
17、在实施方式中,所提取的与从所述环境信息识别的停车位相关联的所述一个或更多个参数包括以下要素中的至少一个要素:
18、所识别的停车位相对于载具的位置;
19、所识别的停车位的一个或更多个尺寸;
20、所识别的停车位的方位。
21、在实施方式中,随着时间更新所述停车区域的所述布局包括随着时间生成表示已经从所述环境信息识别的停车位的第一停车位单元,以及基于已经从所述环境信息识别的停车位和所述当前布局模型来预测对应于预见的停车位的第二停车位单元。
22、通过基于布局模型和已经识别的停车位添加预测的或外推的停车位,停车区域布局可以延伸超过已经识别或检测到的停车位。这允许较早地估计停车位位置,其可以通过规划较简单的轨迹来显著降低停车操纵的复杂性。不能保证所预测或预见的停车位存在并且未被占用。但是,在获得了所述停车位的环境信息时,停车位稍后将被再次确认或不被确认。
23、有利地,预测第二停车位单元的步骤将由所述载具的所述感测系统覆盖的感测区域外部的停车位单元设置或添加在用于所述停车区域的所述布局内。
24、本公开还涉及一种包括指令的计算机程序,当所述程序由计算机执行时,所述指令使所述计算机执行先前定义的方法;一种计算系统,包括适于执行所述方法的步骤的装置;包括该计算系统的载具。
技术特征:
1.一种确定用于停车区域(700)的布局的由计算机实现的方法,所述方法包括以下步骤:
2.根据权利要求1所述的由计算机实现的方法,其中,所确定的停车区域布局用于控制所述载具的一个或更多个功能。
3.根据权利要求1或2所述的由计算机实现的方法,其中,所确定的停车区域布局用于控制所述载具的驾驶轨迹和/或高级驾驶员辅助系统adas控制功能。
4.根据前述权利要求中的任一项所述的由计算机实现的方法,所述方法还包括步骤(s11):向所述停车区域(700)的所述布局(800)的多个停车位单元(801、802…)中的各停车位单元分配指示该停车位的占用概率的占用状态得分,以及基于所述环境信息更新所述占用状态得分。
5.根据权利要求5所述的由计算机实现的方法,其中,除非所述环境信息提供该停车位单元的占用指示,否则默认地将指示未占用状态的得分分配给所述停车区域的所述布局的多个停车位单元中的各停车位单元。
6.根据前述权利要求中的任一项所述的由计算机实现的方法,所述方法还包括步骤(s13):基于分配给所述多个停车位单元中的各停车位单元的所述占用状态得分来识别未占用停车位,以及步骤(s15):确定在所识别的未占用停车位中停放所述载具(200)的停车操纵。
7.根据权利要求1至6中的任一项所述的由计算机实现的方法,其中,所提取的与从所述环境信息识别的停车位相关联的所述一个或更多个参数包括以下要素中的至少一个要素:
8.根据权利要求1至7中的任一项所述的由计算机实现的方法,其中,随着时间更新(s10)所述停车区域(700)的所述布局(800)包括随着时间生成表示已经从所述环境信息识别的停车位的第一停车位单元,以及基于已经从所述环境信息识别的停车位和所述当前布局模型来预测对应于预见的停车位的第二停车位单元。
9.根据权利要求8所述的由计算机实现的方法,其中,预测所述第二停车位单元的步骤包括将由所述载具的所述感测系统覆盖的感测区域外部的停车位单元设置在所述停车区域布局内。
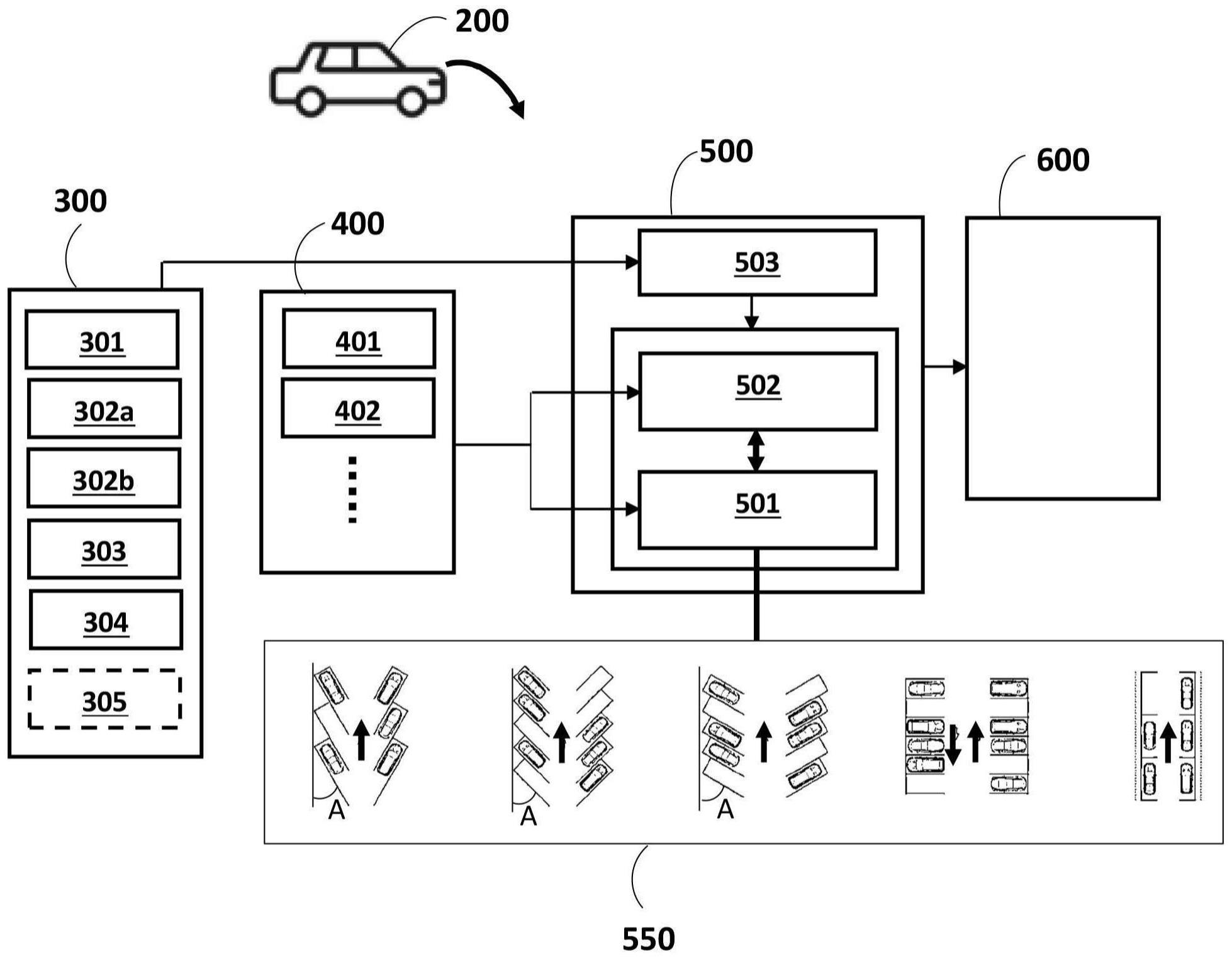
10.根据权利要求1至9中的任一项所述的由计算机实现的方法,其中,确定一个或更多个布局模型的步骤(s7)包括从存储多个预定义布局模型的数据库(503)取得所述一个或更多个布局模型。
11.根据权利要求1至10中的任一项所述的由计算机实现的方法,其中,根据所述载具的所述感测系统提供的所述感测数据确定与所述载具的周围环境相关的环境信息的步骤包括以下各项中的至少一项:
12.根据权利要求11所述的由计算机实现的方法,其中,确定(s7)用于所述停车区域的一个或更多个布局模型的步骤还基于与所述载具(200)的周围环境相关的语义信息。
13.一种计算机可读数据介质,所述计算机可读数据介质上存储有计算机程序,当所述计算机程序由计算机执行时,使所述计算机执行根据权利要求1至12中的任一项所述的方法。
14.一种计算系统,所述计算系统包括用于执行根据权利要求1至12中的任一项所述的方法的步骤的装置。
15.一种载具,所述载具包括根据权利要求14所述的计算系统。
技术总结
本公开提供确定停车区域布局的方法。所述方法包括:当载具(200)在停车区域中移动时,根据由载具的感测系统提供的感测数据确定与载具的周围环境相关的环境信息;提取与从环境信息识别的停车位相关联的参数;至少基于所提取的参数,确定用于停车区域的布局模型,各个布局模型包括底层停车位模板;向各个所确定的布局模型分配(S9)指示相应的底层停车位模板多么匹配与从环境信息识别的停车位相关联的参数的置信度得分;以及选择(S10)停车区域的具有最高置信度得分的布局模型作为用于确定用于停车区域的布局的当前布局模型,其中,所选择的布局模型基于分配给该布局模型的根据在载具移动时收集的感测数据生成的置信度得分来随时间更新。
技术研发人员:M·法拉格,D·凯斯拉尔
受保护的技术使用者:APTIV技术有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!