全息路口毫米波雷达数据处理方法、装置及计算机设备与流程
本申请涉及智能交通,尤其涉及一种全息路口毫米波雷达数据处理方法、装置、计算机设备及存储介质。
背景技术:
1、车路协同的智能路侧感知设备可实时地对交通参与者进行全息感知,不仅能够为单车智能提供其感知范围之外的交通状况,也能为智慧城市提供实时交通场景的数字孪生视角,从而实现精细化的交通管理和控制。智能路侧感知设备的主要作用是能够实时还原交通场景,主要的设备有视频、激光雷达、毫米波雷达等,毫米波雷达以其全天时、全天候、速度测量准、覆盖范围大等特点成为智能路侧感知设备不可或缺的核心传感器之一。
2、目前交通场景的毫米波雷达主要应用包括卡口测速、车流量检测、排队长度检测等,这些应用的毫米波雷达数据处理方法比较简单且功能很少,只测量了车辆速度或者车辆统计参数的准确性,缺乏对整个检测范围内的所有目标轨迹跟踪。而全息路口场景感知需要毫米波雷达对检测范围内的车辆、行人、动物等所有交通参与者进行实时的、精准的探测。在各种交通场景中,包括城市路口、城市路段、高速公路、快速路、隧道等,城市路口的交通状况最为复杂,安装在城市路口的毫米波雷达难以解决的问题也最多,如拐弯车辆分裂(即在车辆在拐弯过程中将拐弯同一个车辆识别成多个车辆)是众多毫米波雷达产家关注的焦点。
3、因此,现在亟需一种全息路口毫米波雷达数据处理方法、装置及计算机设备来解决上述问题。
技术实现思路
1、本申请实施例提供一种全息路口毫米波雷达数据处理方法、装置及计算机设备,用于解决拐弯车辆分裂的问题。
2、本发明实施例提供一种全息路口毫米波雷达数据处理方法,所述方法包括:
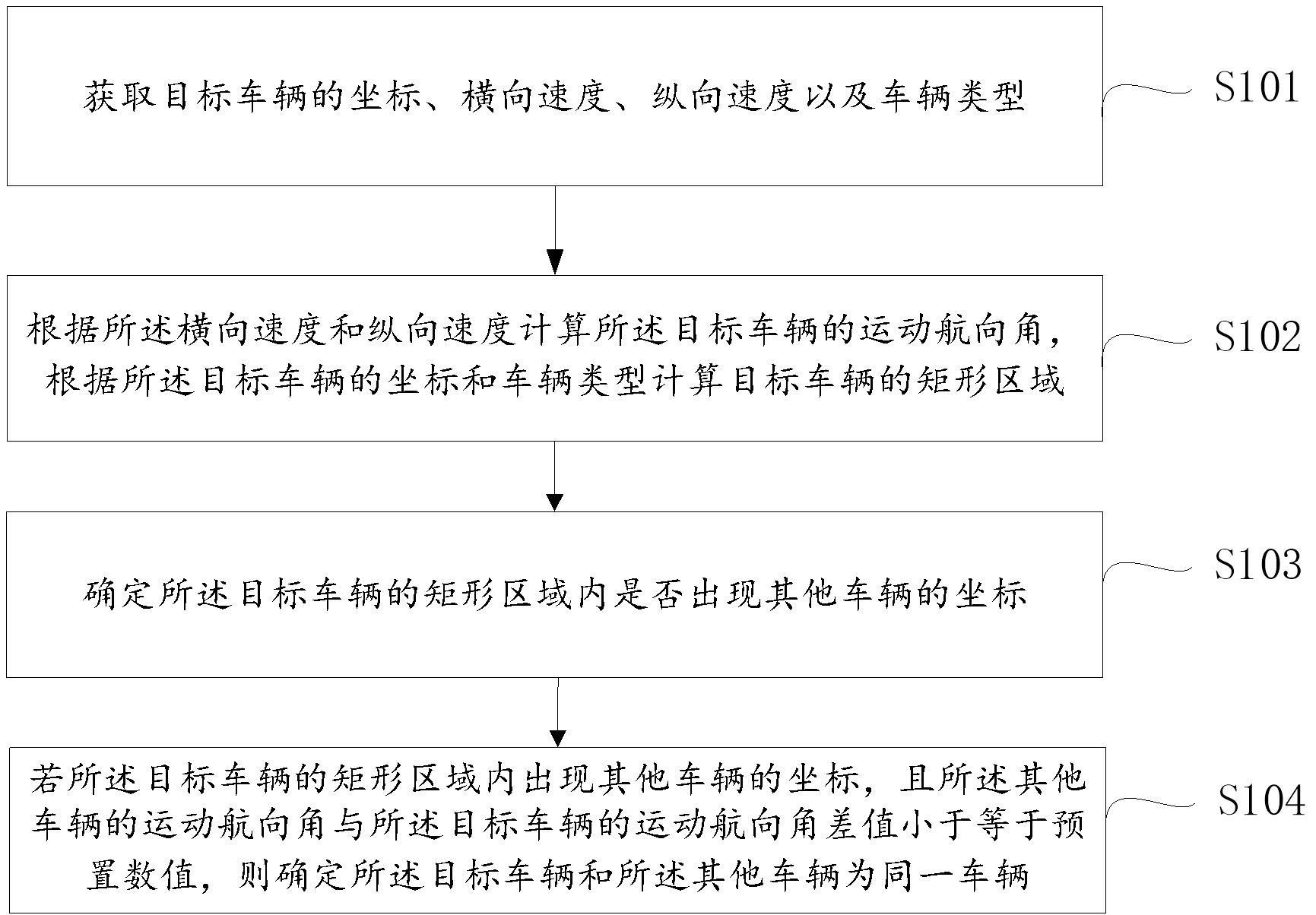
3、获取目标车辆的坐标、横向速度、纵向速度以及车辆类型;
4、根据所述横向速度和纵向速度计算所述目标车辆的运动航向角,根据所述目标车辆的坐标和车辆类型计算所述目标车辆的矩形区域;
5、确定所述目标车辆的矩形区域内是否出现其他车辆的坐标;
6、若所述目标车辆的矩形区域内出现其他车辆的坐标,且所述其他车辆的运动航向角与所述目标车辆的运动航向角差值小于等于预置数值,则确定所述目标车辆和所述其他车辆为同一车辆。
7、本发明实施例提供一种全息路口毫米波雷达数据处理装置,所述装置包括:
8、获取模块,用于获取目标车辆的坐标、横向速度、纵向速度以及车辆类型;
9、计算模块,用于根据所述横向速度和纵向速度计算所述目标车辆的运动航向角,根据所述目标车辆的坐标和车辆类型计算所述目标车辆的矩形区域;
10、确定模块,用于确定所述目标车辆的矩形区域内是否出现其他车辆的坐标;
11、所述确定模块,还用于若所述目标车辆的矩形区域内出现其他车辆的坐标,且所述其他车辆的运动航向角与所述目标车辆的运动航向角差值小于等于预置数值,则确定所述目标车辆和所述其他车辆为同一车辆。
12、一种计算机设备,包括存储器、处理器以及存储在所述存储器中并可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现上述全息路口毫米波雷达数据处理方法。
13、一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,所述计算机程序被处理器执行时实现上述全息路口毫米波雷达数据处理方法。
14、一种计算机程序产品,所述计算机程序产品包括计算机程序,所述计算机程序被处理器执行时实现上述的全息路口毫米波雷达数据处理方法。
15、本发明提供一种全息路口毫米波雷达数据处理方法、装置及计算机设备,首先获取目标车辆的坐标、横向速度、纵向速度以及车辆类型;然后根据横向速度和纵向速度计算目标车辆的运动航向角,根据目标车辆的坐标和车辆类型计算目标车辆的矩形区域;确定目标车辆的矩形区域内是否出现其他车辆的坐标;若目标车辆的矩形区域内出现其他车辆的坐标,且其他车辆的运动航向角与所述目标车辆的运动航向角差值小于等于预置数值,则确定所述目标车辆和所述其他车辆为同一车辆。从而通过本发明解决了由于车辆外形结构、运动状态而导致的毫米波雷达探测数据目标分裂问题,即同一辆车有多个目标输出。降低虚假目标的出现概率,提高车流量统计精度。
技术特征:
1.一种全息路口毫米波雷达数据处理方法,其特征在于,所述方法包括:
2.根据权利要求1所述的方法,其特征在于,所述方法还包括:
3.根据权利要求2所述的方法,其特征在于,所述根据获取的来向或去向车辆的坐标、横向速度、纵向速度,更新轨迹池中的轨迹,包括:
4.根据权利要求3所述的方法,其特征在于,所述根据所述非关联轨迹的停止标识,更新轨迹池中对应的非关联轨迹,包括:
5.根据权利要求3所述的方法,其特征在于,所述根据所述非关联轨迹的停止标识,更新轨迹池中对应的非关联轨迹,并记录非关联轨迹的丢失次数之前,所述方法还包括:
6.根据权利要求2所述的方法,其特征在于,若通过毫米波雷达获取的为来向车辆,所述方法还包括:
7.根据权利要求6所述的方法,其特征在于,所述根据纵向相对距离的大小分别给参加比较的2个来向车辆的超大车相似度计数器、大车相似度计数器、中车相似度计数器加1,包括:
8.根据权利要求2所述的方法,其特征在于,若通过毫米波雷达获取的为去向车辆,所述方法还包括:
9.根据权利要求8所述的方法,其特征在于,所述根据同一聚类中距所述毫米波雷达的最远点和最近点的纵向相对距离,确定所述聚类中的车辆类型为中车、大车或超大车,包括:
10.根据权利要求8所述的方法,其特征在于,所述确定所述聚类中的车辆类型为小车,包括:
11.一种全息路口毫米波雷达数据处理装置,其特征在于,所述装置包括:
12.一种计算机设备,包括存储器、处理器以及存储在所述存储器中并可在所述处理器上运行的计算机程序,其特征在于,所述处理器执行所述计算机程序时实现如权利要求1至10任一项所述的全息路口毫米波雷达数据处理方法。
13.一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现如权利要求1至10任一项所述的全息路口毫米波雷达数据处理方法。
技术总结
本申请提供了一种全息路口毫米波雷达数据处理方法、装置及计算机设备,涉及智能交通领域,用于解决拐弯车辆分裂的问题。方法主要包括:获取目标车辆的坐标、横向速度、纵向速度以及车辆类型;根据横向速度和纵向速度计算所述目标车辆的运动航向角,根据所述目标车辆的坐标和车辆类型计算所述目标车辆的矩形区域;确定所述目标车辆的矩形区域内是否出现其他车辆的坐标;若所述目标车辆的矩形区域内出现其他车辆的坐标,且所述其他车辆的运动航向角与所述目标车辆的运动航向角差值小于等于预置数值,则确定所述目标车辆和所述其他车辆为同一车辆。
技术研发人员:朱海洋,冯泽峰,张旭,王磊磊,于巍巍,王浩江,陆孝松,李松
受保护的技术使用者:江西昂然信息技术有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!