一种车辆及其目标威胁估计方法、计算机存储介质与流程
本申请涉及道路安全,特别是涉及一种车辆及其目标威胁估计方法、计算机存储介质。
背景技术:
1、十字路口作为交通枢纽,是城市道路交通系统的重要组成部分,丰富了交通内容,改善了交通参与者的通行效率。由于车辆与行人,车辆与车辆(包括机动车辆与非机动车车辆)等频繁地在有限区域交叉口内进行交互,事故情况十分复杂,交通事故时有发生,特别在无信号交叉口场景中没有信号灯控制,汽车车速相对信号交叉口更快,驾驶员面对突然横穿交叉口的行人若无法快速做出反应,发生事故的风险极大。统计结果表明,近年来,在世界各国的所有交通=事故中,发生在十字路口处的交通事故中占了很大的一部分,这不仅是当前的主要问题,甚至预测在未来道路交通事故中占更大的份额。
2、然而,目前的车辆威胁估计算法需要在识别到车道线的基础上来做相应危险判断,对于车道线的依赖程度很高,因此不适用于十字路口场景,或者缺失车道线等场景。另外,部分车辆威胁估计算法利用ttc(碰撞时间,time to collision)、thw(车距时间,timeof headway)等。但简单的危险估计指标不能动态表征子车和目标车的相对运动状态关系,必须提取动态过程参数来估计危险程度。
技术实现思路
1、本申请提供一种车辆及其目标威胁估计方法、计算机存储介质。
2、本申请采用的一个技术方案是提供一种基于十字路口的目标威胁估计方法,所述目标威胁估计方法包括:
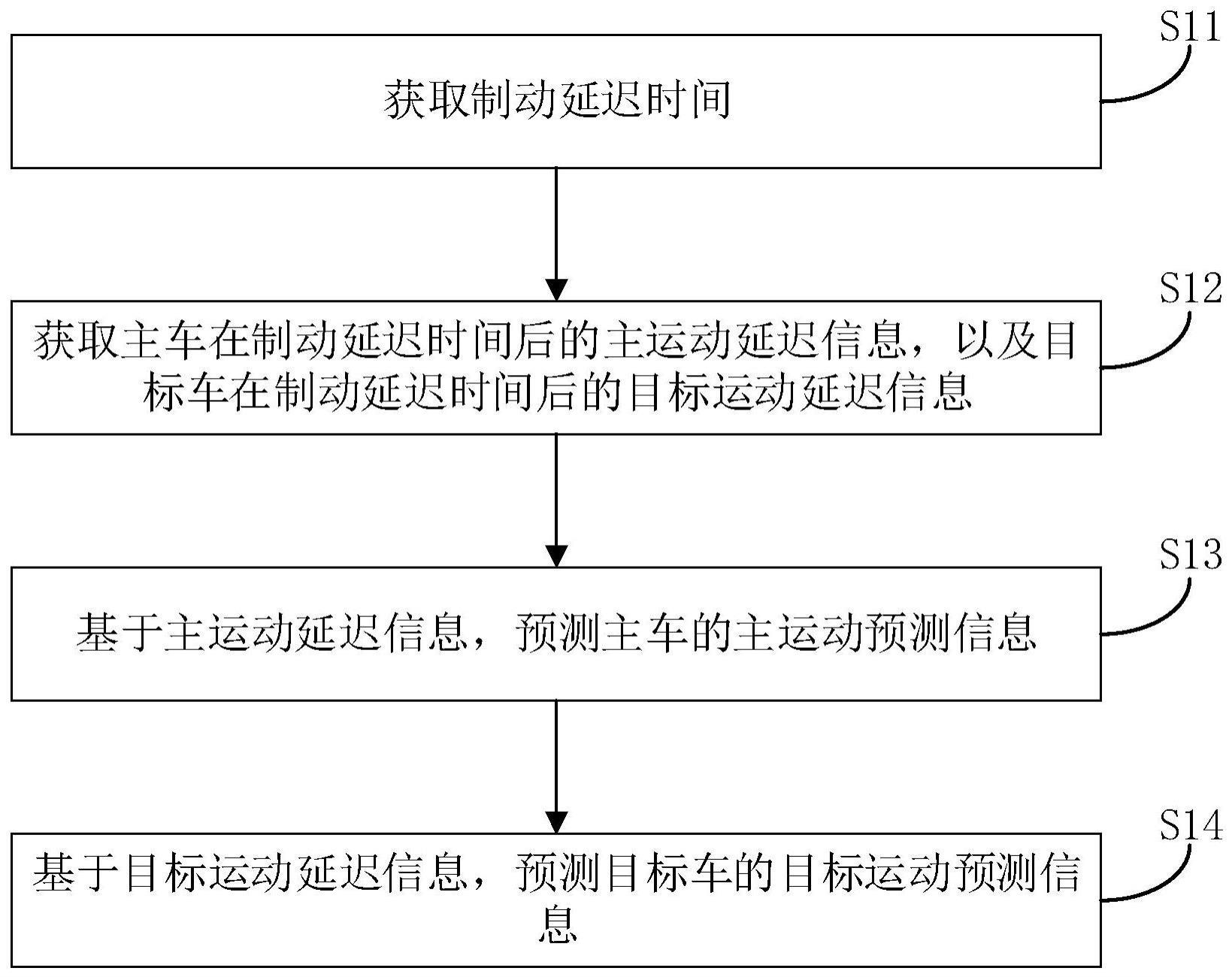
3、获取制动延迟时间;
4、获取主车在所述制动延迟时间后的主运动延迟信息,以及目标车在制动延迟时间后的目标运动延迟信息;
5、基于所述主运动延迟信息,预测所述主车的主运动预测信息;
6、基于所述目标运动延迟信息,预测所述目标车的目标运动预测信息;
7、按照所述主运动预测信息和所述目标运动预测信息,获取所述主车与所述目标车的横向威胁估计信息,和/或纵向威胁估计信息。
8、其中,所述横向威胁估计信息包括主车曲率变化率;
9、所述按照所述主运动预测信息和所述目标运动预测信息,获取所述主车与所述目标车的横向威胁估计信息,和/或纵向威胁估计信息,包括:
10、基于所述主运动预测信息和所述目标运动预测信息获取所述目标车与所述主车最近的两条边以及对角边;
11、利用所述最近的两条边以及对角边,确定所述目标车的角点坐标数据;
12、根据所述角点坐标数据,获取所述主车的近似碰撞点;
13、基于所述近似碰撞点,确定所述主车转向避免碰撞的主车曲率变化率。
14、其中,所述获取所述目标车与所述主车最近的两条边,包括:
15、获取所述目标车的各条边的中点;
16、获取所述各条边的中点与所述主车质心的距离;
17、获取距离最近的两条边作为所述目标车与所述主车最近的两条边。
18、其中,所述获取所述目标车的各条边的中点,包括:
19、对所述目标车的长宽增加预设补偿量,并获取增加所述预设补偿量后所述目标车的质心坐标值以及长宽投影值;
20、基于所述质心坐标值以及所述长宽投影值,确实所述目标车的各条边的角点;
21、按照所述目标车的各条边的角点获取所述目标车的各条边的中点。
22、其中,所述目标威胁估计方法还包括:
23、获取最大横向加速度变化率;
24、基于所述主车曲率变化率,获取当前横向加速度变化率;
25、在所述当前横向加速度变化率大于所述最大横向加速度变化率时,执行自动紧急转向或激活接管车辆。
26、其中,所述纵向威胁估计信息包括加速度值;
27、所述按照所述主运动预测信息和所述目标运动预测信息,获取所述主车与所述目标车的横向威胁估计信息,和/或纵向威胁估计信息,包括:
28、获取在预测时间内,每一时刻所述主车与所述目标车的最近纵向距离;
29、基于所述每一时刻的最近纵向距离,获取所述每一时刻的加速度值;
30、比较所述每一时刻的加速度值与历史时刻的加速度值;
31、在所述每一时刻的加速度值与历史时刻的加速度值的差值大于0时,保留所述当前时刻的加速度值;
32、在所述每一时刻的加速度值与历史时刻的加速度值的差值小于0时,将所述历史时刻的加速度值替换所述当前时刻的加速度值;
33、基于每一时刻的加速度值,获取所述主车与所述目标车的纵向威胁估计信息。
34、其中,所述目标威胁估计方法还包括:
35、在所述加速度值大于加速加速度值,或者所述加速度小于制动加速度值时,执行自动紧急转向或激活接管车辆。
36、其中,所述在所述加速度值大于加速加速度值,或者所述加速度小于制动加速度值时,执行自动紧急转向或激活接管车辆,包括:
37、基于所述加速度值获取加速度变化率;
38、在所述加速度值大于加速加速度值,或者所述加速度变化率大于最大纵向加速加速度变化率时,执行自动紧急转向或激活接管车辆;
39、或者,在所述加速度值小于制动加速度值,或者所述加速度变化率小于最大纵向制动加速度变化率时,执行自动紧急转向或激活接管车辆。
40、本申请采用的另一个技术方案是提供一种车辆,所述车辆包括存储器以及与所述存储器耦接的处理器;
41、其中,所述存储器用于存储程序数据,所述处理器用于执行所述程序数据以实现如上述的目标威胁估计方法。
42、本申请采用的另一个技术方案是提供一种计算机存储介质,所述计算机存储介质用于存储程序数据,所述程序数据在被计算机执行时,用以实现如上述的目标威胁估计方法。
43、本申请的有益效果是:车辆获取制动延迟时间;获取主车在所述制动延迟时间后的主运动延迟信息,以及目标车在制动延迟时间后的目标运动延迟信息;基于所述主运动延迟信息,预测所述主车的主运动预测信息;基于所述目标运动延迟信息,预测所述目标车的目标运动预测信息;按照所述主运动预测信息和所述目标运动预测信息,获取所述主车与所述目标车的横向威胁估计信息,和/或纵向威胁估计信息。本申请的车辆通过提取目标车的运动信息与主车的运动信息,不依赖于其他不稳定外部环境信息,引入预测的思想,分别计算目标车和主车在横向和纵向的威胁评价指标,通过以上动态过程参数来估计目标车对于主车的危险程度。
技术特征:
1.一种基于十字路口的目标威胁估计方法,其特征在于,所述目标威胁估计方法包括:
2.根据权利要求1所述的目标威胁估计方法,其特征在于,
3.根据权利要求2所述的目标威胁估计方法,其特征在于,
4.根据权利要求3所述的目标威胁估计方法,其特征在于,
5.根据权利要求2所述的目标威胁估计方法,其特征在于,
6.根据权利要求1所述的目标威胁估计方法,其特征在于,
7.根据权利要求6所述的目标威胁估计方法,其特征在于,
8.根据权利要求7所述的目标威胁估计方法,其特征在于,
9.一种车辆,其特征在于,所述车辆包括存储器以及与所述存储器耦接的处理器;
10.一种计算机存储介质,其特征在于,所述计算机存储介质用于存储程序数据,所述程序数据在被计算机执行时,用以实现如权利要求1至8任一项所述的目标威胁估计方法。
技术总结
本申请公开了一种车辆及其目标威胁估计方法、计算机存储介质,该方法包括:获取制动延迟时间;获取主车在制动延迟时间后的主运动延迟信息,以及目标车在制动延迟时间后的目标运动延迟信息;基于主运动延迟信息,预测主车的主运动预测信息;基于所述目标运动延迟信息,预测所述目标车的目标运动预测信息;按照所述主运动预测信息和所述目标运动预测信息,获取所述主车与所述目标车的横向威胁估计信息,和/或纵向威胁估计信息。本申请的车辆通过提取目标车的运动信息与主车的运动信息,不依赖于其他不稳定外部环境信息,引入预测的思想,分别计算目标车和主车在横向和纵向的威胁评价指标,通过以上动态过程参数来估计目标车对于主车的危险程度。
技术研发人员:胡凯,王耀农,余伟,丘若峰,钱中岚
受保护的技术使用者:浙江零跑科技股份有限公司
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!