一种基于路内泊车智能一体机的智慧停车管理方法与流程
本发明涉及路内泊车管理,具体为一种基于路内泊车智能一体机的智慧停车管理方法。
背景技术:
1、近年来,我国机动车和机动车驾驶人数量持续快速增长,但各地停车设施的增长速度相对较慢,尤其是市区停车资源紧缺,无法满足日益增长的远方停车需求,导致停车违法现象普遍存在。交通管理部门的管理压力日益增大。如何规范道路停车公共秩序,已成为交通管理部门面临的难题之一。为了提高对路内停车泊位的管理,通常会在不影响交通的马路牙下设置颅内泊车位,并且对应设置停车管理设备。
2、此前市场上路内泊位检测设备,不能够对车辆进入泊位进行精确检测,检测不出是否压线停车、是否压两个泊位停车、是否停的是非机动力,所以没有通过智能终端做精细运营管理,都是靠人来管理。
3、而视频激光雷达配合车牌识别相机及智能一体机后,具备对车辆轨迹精确化跟踪,可以判定车辆是否压线停车、是否压两个泊位停车、所停车辆是否为非机动车,当判断出来后将信息同步给平台,再由平台下发指令给智能一体机,由智能一体机对车主进行提示,提示包括但不限于:欠费补缴,不要压线违停,不要压两个泊位停车,活动信息通知。同时车辆进泊位和离开泊位不同状态下可以接受平台指令对车辆进行拍照取证,实现进泊位、离开泊位的完整取证。
4、因此,针对上述问题提出一种基于路内泊车智能一体机的智慧停车管理方法。
技术实现思路
1、本发明的目的在于提供一种基于路内泊车智能一体机的智慧停车管理方法,以解决上述背景技术中提出的问题。
2、为实现上述目的,本发明提供如下技术方案:
3、一种路内泊车智能一体机,包括设置在路牙上位于两个路内泊位之间的智能一体机,智能一体机包括前侧面板两端设置的摄像头及设置在智能一体机内部的控制器、通讯模块及喇叭,摄像头和喇叭的控制线路均连接控制器的串口,通讯模块与控制器通过串口连接,通讯模块与平台通讯连接;
4、还包括外置的且位于高位的车牌识别相机和激光雷达,车牌识别相机和激光雷达与控制器通讯连接。
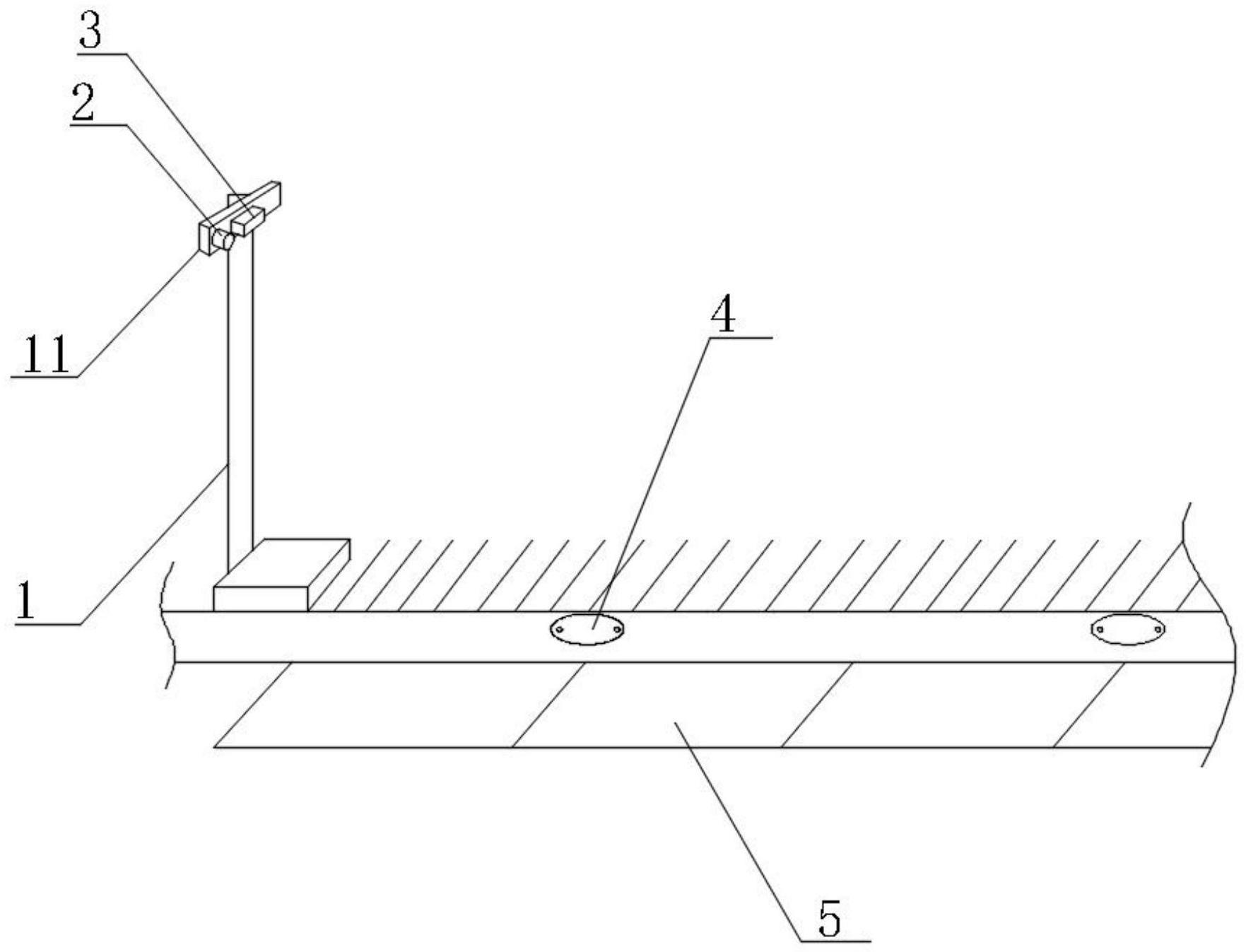
5、作为一种优选方案,车牌识别相机和激光雷达固定安装在安装架上,且安装架通过立柱固定设置在4-6m的高位,并且车牌识别相机和激光雷达的检测头正对路内泊位。
6、一种路内泊车智能一体机的智慧停车管理方法,包括如下步骤:
7、步骤一:车牌识别,利用车牌识别相机对进入识别区域内车辆的信息进行采集,并将信息同步给控制器;
8、步骤二:对被采集信息的车辆进行移动轨迹追踪,激光雷达从控制器同步车辆信息后,即刻对对象车辆进行移动轨迹追踪,当车辆停入路内泊位时,记录泊位信息,并将信息同步给控制器,当车辆离开路内泊位时,激光雷达将车辆离场信息同步给控制器;
9、步骤三:对车辆泊车前后的信息进行采集,当车辆进入路内泊位时,摄像头对车辆的停车信息进行采集,当车辆离开路内泊位时,摄像头对车辆的离场信息进行采集,采集到的信息同步到控制器;
10、步骤四:控制器将车辆的车牌、停车信息及离场信息同步到平台,平台根据上述信息计算费用,并将费用信息同步到收费员的pda或者手机上,还同时同步给控制器,控制器利用喇叭进行语音播报。
11、作为一种优选方案,步骤一中车牌识别相机采集的信息包括车牌号、时间、车辆位置。
12、作为一种优选方案,步骤二中,激光雷达对路内泊位进行三维建模,同时对三维点云图需要进行区域划分,根据路内泊位的尺寸,对每个区域的距离提前做测算,测算后记录在智能控制终端中,激光雷达反馈回的三维空间的距离再与原来标定的区间距离匹配,加上边缘算法最终判定车位是否完部分整停进泊位、是否完全停进泊位、是否部分离开泊位、是否压线停车、是否压两个泊位停车,当出现上述任一问题时,将信息传输到控制器,由控制器控制喇叭进行语音提示,同时,将信息同步到平台,平台将信息同步到收费员的手机上。
13、作为一种优选方案,步骤三中,控制器控制摄像头对车辆泊车前后的信息进行采集,其中,采集信息的依据为激光雷达的检测信息,具体为:当车辆的三分之二进入到路内泊位时、当车辆的三分之一离开路内泊位时,激光平台将信息同步到智能一体机,智能一体机控制摄像头对车辆的信息进行采集,再将采集信息上传控制终端,由控制终端上传平台。
14、作为一种优选方案,步骤四中,平台根据车辆的停车及离场信息计算车费,并将车费信息同步到收费员的pda或者手机上,同时,与控制器进行交互,控制器播报由平台同步的车费信息、欠费信息、路内泊位存在异常信息。
15、作为一种优选方案,一个激光雷达检测n个车位,但因为安装在4-6米高度,所以会有盲区,该盲区通过另一个同侧安装的激光雷达进行补盲。
16、由上述本发明提供的技术方案可以看出,本发明提供的一种基于路内泊车智能一体机的智慧停车管理方法,有益效果是:
17、1、通过在路牙上位于两个路内泊位之间的智能一体机,智能一体机前侧面板两端设置了摄像头,智能一体机内部设置了控制器、通讯模块及喇叭,且由安装在高位的车牌识别相机和激光雷达及平台完成整个流程。车牌识别相机可对进入识别区域内车辆进行信息采集,采集信息同步给控制器,由控制器同步给激光雷达,再由激光雷达对车辆进行移动轨迹追踪,在车辆进入车位泊车、完全泊好、部分离开车位时,利用摄像头现有对车辆的停车及离场信息进行拍摄记录,并且将信息同步到控制终端再由控制终端同步到平台,由平台计算停车费用后同步给收费员,实现对路内泊位管理;提示包括但不限于:对欠费车及时提示车主进行补缴,对压线停车和压两个泊位停车进行提示,对非机动车等物体停在机动车位置进行提示,同时有活动通知时可以通过智能一体机进行提示。
18、2、激光雷达的设置,提高了对泊车位置检测的精度,激光雷达的设置可对路内泊位进行三维建模,并且实时监测路内泊位内部的情况,当出现非机动车停入、机动车停车压线、占位的情况,可及时通过喇叭进行语音提示,便于路内泊位的维护。
技术特征:
1.一种路内泊车智能一体机,包括设置在路牙上位于两个路内泊位(5)之间的智能一体机(4),其特征在于:所述智能一体机(4)包括前侧面板两端设置的摄像头(41)及设置在智能一体机(4)内部的控制器、通讯模块及喇叭,所述摄像头(41)和喇叭的控制线路均连接控制器的串口,所述通讯模块与控制器通过串口连接,所述通讯模块与平台通讯连接;
2.根据权利要求1所述的一种路内泊车智能一体机,其特征在于:所述车牌识别相机(2)和激光雷达(3)固定安装在安装架(11)上,且安装架(11)通过立柱(1)固定设置在4-6m的高位,并且车牌识别相机(2)和激光雷达(3)的检测头正对路内泊位(5)。
3.基于权利要求1-2所述的一种路内泊车智能一体机的智慧停车管理方法,其特征在于:包括如下步骤:
4.根据权利要求3所述的一种基于路内泊车智能一体机的智慧停车管理方法,其特征在于:步骤一中车牌识别相机采集的信息包括车牌号、时间、车辆位置。
5.根据权利要求3所述的一种基于路内泊车智能一体机的智慧停车管理方法,其特征在于:步骤二中,激光雷达对路内泊位进行三维建模,同时将三维点云图上传控制器,控制器对路内泊位进行区域划分,根据路内泊位的尺寸,对每个区域的距离提前做测算,测算后记录在智能控制终端中,激光雷达反馈回的三维点云图数据再与原来标定的区间距离匹配,加上边缘算法最终判定车位是否完部分整停进泊位、是否完全停进泊位、是否部分离开泊位、是否压线停车、是否压两个泊位停车,当出现上述任一问题时,将信息传输到控制器,由控制器控制喇叭进行语音提示,同时,将信息同步到平台,平台将信息同步到收费员的手机上。
6.根据权利要求3所述的一种基于路内泊车智能一体机的智慧停车管理方法,其特征在于:步骤三中,控制器控制摄像头对车辆泊车前后的信息进行采集。其中,采集信息的依据为激光雷达的检测信息,采集指令由平台下发,具体为:当车辆的三分之二进入到路内泊位时、当车辆全部停进泊位时、当车辆的车身10%-30%离开路内泊位时,激光雷达将信息同步到控制器,再由控制器上传平台,平台下发指令给智能一体机,智能一体机控制摄像头对车辆停车进行信息采集。
7.根据权利要求3所述的一种基于路内泊车智能一体机的智慧停车管理方法,其特征在于:步骤四中,平台根据车辆的停车及离场信息计算车费,并将车费信息同步到收费员的pda或者手机上,同时,与控制器进行交互,控制器播报由平台同步的车费信息、欠费信息、路内泊位存在的异常信息。
8.根据权利要求1所述的一种路内泊车智能一体机,其特征在于:一个智能一体机可以只负责语音播报,也可以同时兼有接受平台指令进行语音播报,同时按受指令拍照并上传拍照信息给控制器。
9.根据权利要求1所述的一种路内泊车智能一体机,其特征在于:一个智能一体机安装在路牙或绿化带上。
技术总结
本发明涉及路内泊车管理技术领域,尤其为一种基于路内泊车智能一体机的智慧停车管理方法,包括设置在路牙上或路内泊位绿化带位于两个路内泊位之间的智能一体机。通过在路牙上位于两个路内泊位之间的智能一体机,智能一体机前侧面板两端配置了摄像头,智能一体机内部设置了控制器、通讯模块及喇叭,配合位于高位的车牌识别相机、激光雷达、管理平台完成整个工作。车牌识别相机对进入识别区域内车辆进行信息采集,采集后由智能控制终端同步给激光雷达,再由激光雷达对车辆进行轨迹追踪,待车辆泊车完时,利用智能一体机完成对车辆的拍照,并将信息同步到平台,由平台计将信息同步给收费PDA或智能一体机,实现对路内泊位精细化管理。
技术研发人员:沈孟华
受保护的技术使用者:厦门民望科技有限公司
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!