泊车方法、泊车管理系统及泊车机器人与流程
本发明涉及技术自动泊车领域,特别是泊车方法、泊车管理系统及泊车机器人。
背景技术:
1、现有技术中,原来的人工收费停车场逐渐正在被向无人值守停车场转变,通过车牌自动识别技术和人工扫码支付实现停车智能化,并且停车场中每个停车位上都设有状态指示灯,用来提醒入场车辆车位的占用状态,这在某种程度上降低了停车辆的管理成本,提高了入场车辆的停车效率,但是依然存在如下问题。
2、例如,公开号:cn105809748a,专利名称:一种智能泊位系统及泊车方法,公开了一种智能泊位系统及泊车方法采用车辆识别装置识别车辆信息,并将信息传输至单片机保存;单片机记录接收到的车辆信息,输出控制信号控制升降装置降下,在车辆准确泊位后控制升降柱升高,并开始停车计费;刷卡装置,用于刷卡缴费,缴费完成后单片机输出控制信号控制升降柱降下,在私人车位或公共停车位在车位空闲后,需要停车的用户可以随时选择车位泊车。
3、上述方案中具有以下问题:在车辆进场前,不能知晓整个停车场是否还有空余停车位,很容易出现道达停车辆后没有停车位的情况,以及不能提前知晓若没有空位还需要等待多长时间,不能为车主是否在该停车场进行停车的决策起到参考。
技术实现思路
1、本发明的目的是为了解决上述问题,设计了泊车方法,包括:
2、步骤一:车辆行驶至停车场内,扫描车辆基本信息并输入预计停车时间;
3、步骤二:泊车管理系统收到车辆基本信息,等待泊车管理系统判断是否有空车位,
4、若判断为具有空车位,泊车管理系统为其分配空车位并规划行驶路线,通过泊车机器人进行自动泊车;
5、若判断为无空车位,泊车管理系统根据泊车人员预计停车时间计算出预计排队等待时间,根据泊车人员预计停车时间,通过泊车机器人安排车辆进行自动泊车;
6、步骤三:当车辆进入车位,泊车管理系统将车位信息保存并发送至泊车人员手机终端,
7、步骤四:泊车人员取车,泊车机器人自动将车辆运送至取车区。
8、进一步地,在所述步骤二中,预计排队等待时间计算方法如下:
9、设第i辆车的停车时长满足泊松分布,则停车时长的概率分布pi符合公式(1):
10、
11、其中,λ为停车场中空闲车位的期望值。
12、设历史数据中每个停车时长的概率分布为pi,则在预计停车时间tp内离开停车场的车辆数mtp为:
13、
14、其中,n为进入停车场的车辆数。
15、停车场中有空闲车位时预计还要排队等待时间tω,可以通过公式(3)计算:
16、
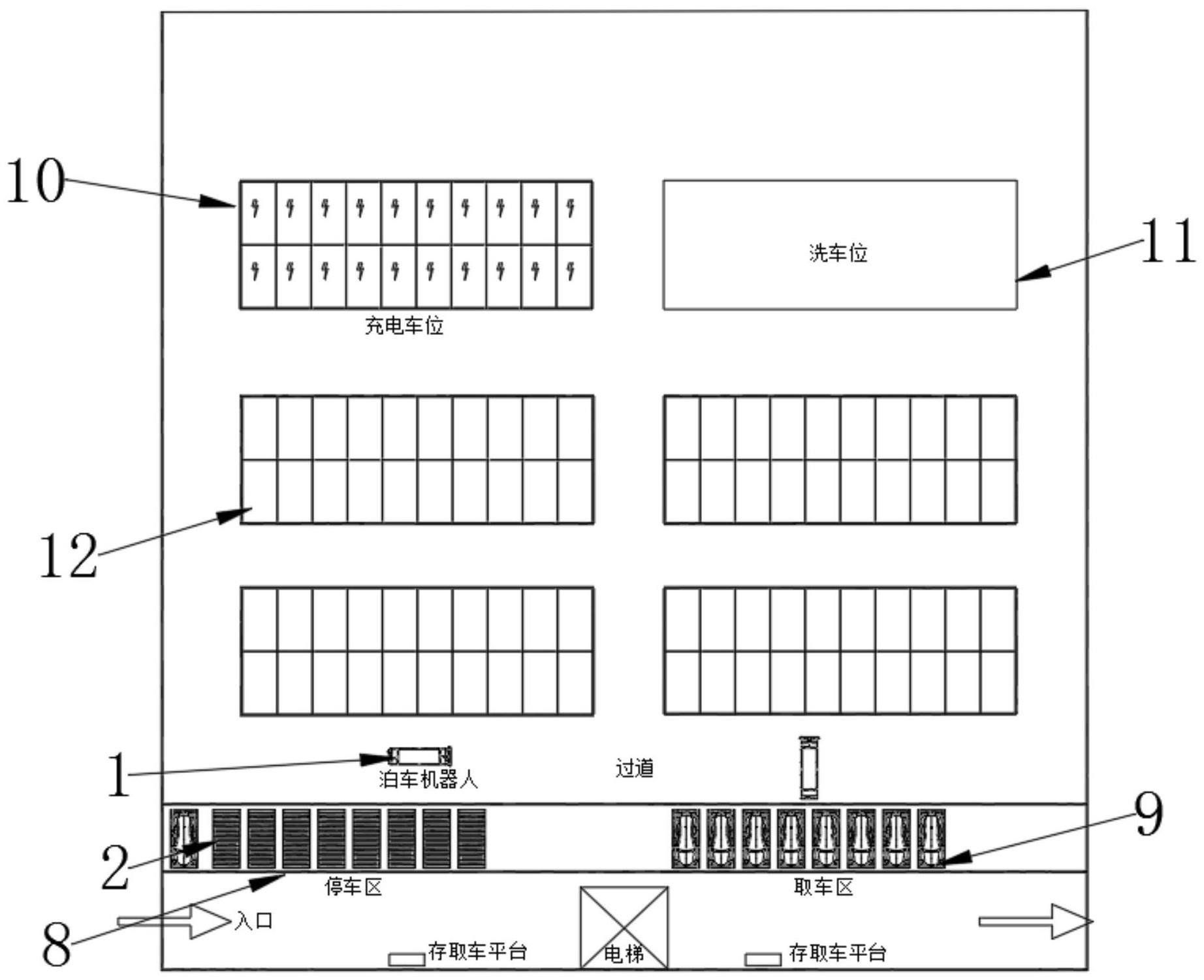
17、进一步地,在步骤一中,车辆进入停车场时,泊车人员可选择功能服务,所述功能服务包括洗车服务、充电服务中的一种或多种。
18、进一步地,在步骤一中,车辆基本信息包括车辆号牌、进入时间和泊车人员手机号码。
19、进一步地,在步骤二中,根据司机预计停车时间,通过泊车机器人安排车辆进入长时停车区或短时停车区。
20、进一步地,在步骤四中,泊车人员取车时,通过扫描二维码、输入车牌号或手机预约方式取车。
21、泊车管理系统,应用于上述泊车方法,根据泊车人员需求将车辆移送至停车区或功能区,包括车辆入场识别模块,用于在车辆入场时识别车辆基础信息并记录预计停车时间,实时获取是否具有空闲车位信息;
22、预计排队等待时间计算模块,当停车区无空车位时,通过预计停车时间预估泊车人员预计排队等待的时间tω;
23、泊车机器人,用于在泊车时将车辆运送至停车区或功能区、在驶出停车场时将车辆运送至取车区;
24、泊车情况信息模块,用于在车辆泊入停车位后生成用于提醒车主将所述停车位对应的车位号与车辆基础信息一一对应的泊车情况信息,记录泊车时间。
25、停车费用结算模块,用于接收车辆出场请求信息,并读取对应车辆的停车费用优惠信息,根据所述泊车情况信息、泊车时间和停车费用优惠信息进行停车费用结算。
26、泊车机器人,应用于上述泊车管理系统,包括机器人主体和托盘,所述机器人主体顶部具有可升降的支撑板,所述托盘用于搭载车辆,所述机器人主体固定有可移动的移动模块;
27、所述机器人主体侧部及端部固定有深度相机,所述机器人主体端部固定有超声传感器,所述机器人主体顶部固定有激光雷达。
28、进一步地,所述托盘四周边缘固定有多个激光发射器。
29、进一步地,所述托盘底部四周固定有液压支脚,所述液压支脚用于支撑于地面,所述液压支脚可伸出或缩回。
30、利用本发明的技术方案制作的泊车方法,达到的有益效果:
31、进入停车场时,泊车人员输入预计停车时间,泊车管理系统可判断是否具有空车位,若没有空位,泊车管理系统可根据改时间和历史数据,计算预计排队等待时间,泊车人员可根据预计排队等待时间进行决策是否在该停车场泊车。
32、利用本发明的技术方案制作的泊车管理系统,达到的有益效果:
33、除停车区外,还具有充电区和洗车区,泊车人员在泊车的同时可选择其他功能服务,集多种服务于一体,提升泊车人员使用感受。
34、利用本发明的技术方案制作的泊车机器人,达到的有益效果:
35、在进入停车场时,可将车辆停在存车区,由泊车机器人将车辆运送至停车位或功能区,在泊车人员需要离开停车场时,泊车机器人将车辆由停车区运送至取车区,泊车人员无需自行前往停车区内泊车或取车,减少了泊车所需的时间,停车高效。
技术特征:
1.泊车方法,其特征在于,包括:步骤一:车辆行驶至停车场内,扫描车辆基本信息并输入预计停车时间;
2.根据权利要求1所述的泊车方法,其特征在于,在所述步骤二中,预计排队等待时间计算方法如下:
3.根据权利要求2所述的泊车方法,其特征在于,在步骤一中,车辆进入停车场时,泊车人员可选择功能服务,所述功能服务包括洗车服务、充电服务中的一种或多种。
4.根据权利要求1所述的泊车方法,其特征在于,在步骤一中,车辆基本信息包括车辆号牌、进入时间和泊车人员手机号码。
5.根据权利要求4所述的泊车方法,其特征在于,在步骤二中,根据司机预计停车时间,通过泊车机器人安排车辆进入长时停车区(12)或短时停车区(12)。
6.根据权利要求4所述的泊车方法,其特征在于,在步骤四中,泊车人员取车时,通过扫描二维码、输入车牌号或手机预约方式取车。
7.泊车管理系统,应用于上述权利要求1-6任意一项所述的泊车费方法,其特征在于,根据泊车人员需求将车辆移送至停车区(12)或功能区,包括车辆入场识别模块,用于在车辆入场时识别车辆基础信息并记录预计停车时间,实时获取是否具有空闲车位信息;
8.泊车机器人,应用于权利要求7所述的泊车管理系统,其特征在于,包括机器人主体(1)和托盘(2),所述机器人主体(1)顶部具有可升降的支撑板(3),所述托盘(2)用于搭载车辆,所述机器人主体(1)固定有可移动的移动模块;
9.根据权利要求8所述的泊车机器人,其特征在于,所述托盘(2)四周边缘固定有多个激光发射器。
10.根据权利要求9所述的泊车机器人,其特征在于,所述托盘(2)底部四周固定有液压支脚,所述液压支脚用于支撑于地面,所述液压支脚可伸出或缩回。
技术总结
本发明公开了泊车方法,包括步骤一:车辆行驶至停车场内,扫描车辆基本信息并输入预计停车时间;步骤二:泊车管理系统收到车辆基本信息,判断是否有空车位,若判断为具有空车位,泊车管理系统为其分配空车位并规划行驶路线,通过泊车机器人进行自动泊车;若判断为无空车位,泊车管理系统根据泊车人员预计停车时间计算出预计排队等待时间,根据泊车人员预计停车时间,通过泊车机器人安排车辆进行自动泊车;步骤三:当车辆进入车位,步骤四:泊车人员取车,还公开了泊车管理系统与泊车机器人。本发明的有益效果是,进入停车场时,泊车人员输入预计停车时间,泊车管理系统可判断是否具有空车位,若没有空位,计算预计排队等待时间。
技术研发人员:张天资,贾红波,王帅,魏鹏飞,邵俊峰
受保护的技术使用者:上海莱陆科技有限公司
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!