一种颠簸路段智能化检测报警方法及系统与流程
本发明属于智能驾驶,尤其涉及一种颠簸路段智能化检测报警方法及系统。
背景技术:
1、随着车辆的拥有量越来越高,开车出行的几率越来越高,开车出行遇到的路况多种多样,特别是有时经过的道路上有坑洼、比较高的减速带,开过山路附近的道路有比较大的落石,或者经过的井盖翘起以及井盖丢失的下水道时,车辆会发生颠簸,严重的时候可能会出现比较严重的交通事故。因此,驾驶员在开车时需要集中注意力看车辆前方道路情况,同时也需要车辆上有对前方颠簸道路进行警示的功能现有技术具有以下方案:1、采用激活雷达检测前方道路的颠簸情况,当出现坑洼时进行报警;2、采用单目摄像头检测前方道路的颠簸情况,当检测到出现比较大的坑洼时,进行报警;3、采用单目摄像头检测前方道路上车辆的运动状态,当检测到前方车辆在某个位置发生上下颠簸时,则判断道路在前方某处存在颠簸路段,在经过时提前进行预警或者对车辆进行减速控制。
2、现有技术具有以下缺陷:1、激光雷达的成本太高,以激光雷达进行颠簸检测,会导致整车成本大大增加;2、单目摄像头对于距离的测量不准确,不能够准确计算车辆是否会经过坑洼位置,或者车轮会不会压在有问题的井盖处;3、根据前方车辆进行判断可靠性不高,不能保证假如前方车辆压在了道路的坑洼位置,本车经过时也会压在同样的位置,且在前方没有车辆时,无法进行功能的使用。
技术实现思路
1、本发明实施例的目的在于提供一种颠簸路段智能化检测报警方法及系统,旨在解决背景技术中提出的问题。
2、为实现上述目的,本发明实施例提供如下技术方案:
3、一种颠簸路段智能化检测报警方法,所述方法具体包括以下步骤:
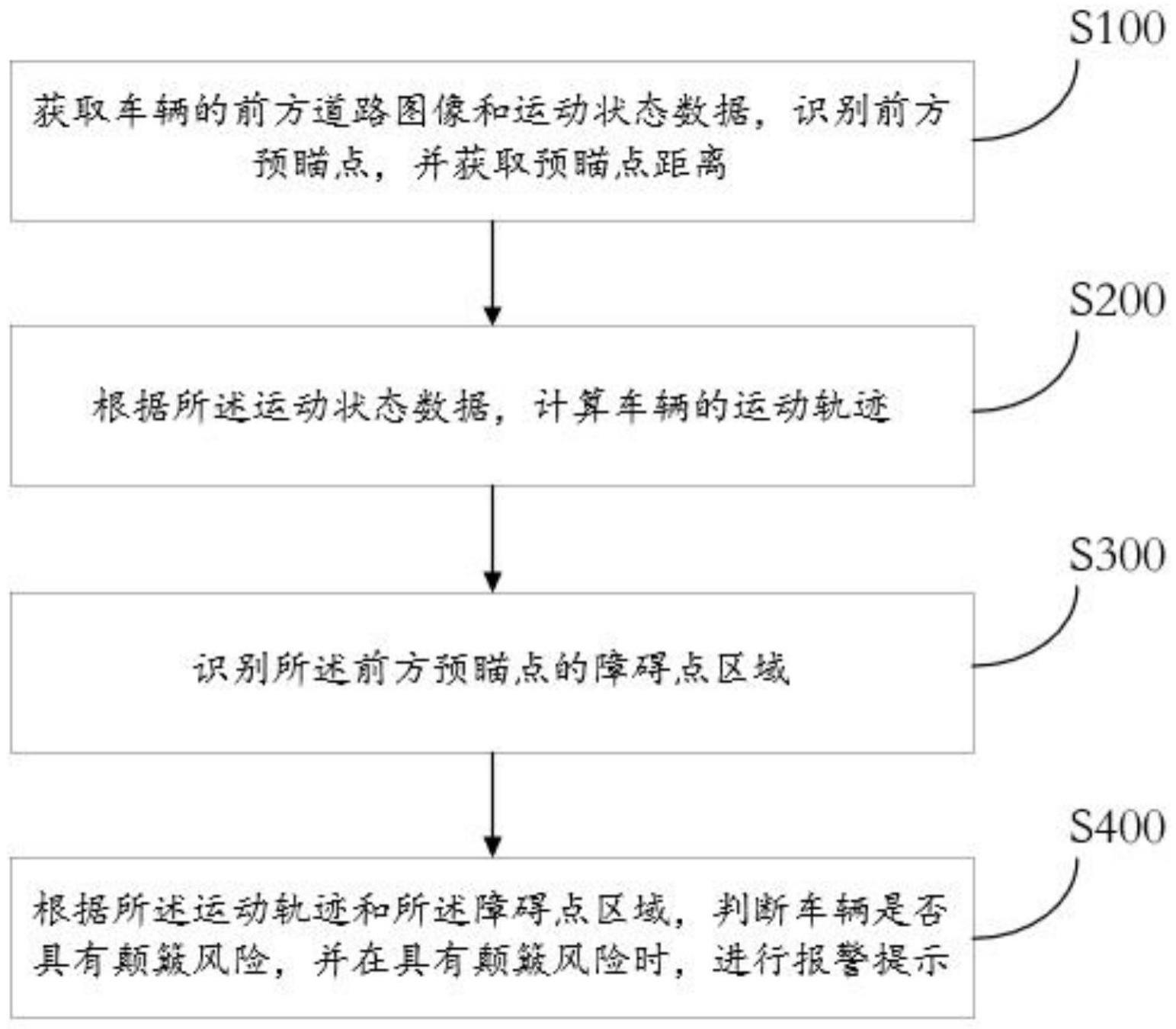
4、获取车辆的前方道路图像和运动状态数据,识别前方预瞄点,并获取预瞄点距离;
5、根据所述运动状态数据,计算车辆的运动轨迹;
6、识别所述前方预瞄点的障碍点区域;
7、根据所述运动轨迹和所述障碍点区域,判断车辆是否具有颠簸风险,并在具有颠簸风险时,进行报警提示。
8、作为本发明实施例技术方案进一步的限定,所述获取车辆的前方道路图像和运动状态数据,识别前方预瞄点,并获取预瞄点距离具体包括以下步骤:
9、双目拍摄获取车辆的前方道路图像;
10、对所述前方道路图像进行分析,识别前方预瞄点;
11、获取车辆的运动状态数据,自动查表获取所述前方预瞄点的预瞄点距离。作为本发明实施例技术方案进一步的限定,所述运动轨迹的公式为:
12、y=c_0+c_1x+c_2x2+c_3x3
13、其中,x和y为车辆的质心的坐标数据。
14、作为本发明实施例技术方案进一步的限定,所述根据所述运动轨迹和所述障碍点区域,判断车辆是否具有颠簸风险,并在具有颠簸风险时,进行报警提示具体包括以下步骤:
15、根据所述运动轨迹,计算所述前方预瞄点的预瞄点质心位置;
16、按照所述预瞄点质心位置,计算车辆的轮胎经过区间和底盘经过区间;
17、综合所述障碍点区域、所述轮胎经过坐标和所述底盘经过区间,判断车辆是否具有颠簸风险,并在具有颠簸风险时,进行报警提示。
18、作为本发明实施例技术方案进一步的限定,所述预瞄点质心位置为(r,y_1),其中:
19、y_1=c_0+c_1r+c_2r2+c_3r3。
20、作为本发明实施例技术方案进一步的限定,所述轮胎经过区间为:
21、[y_1+0.5*d-0.5*d,y_1+0.5*d]和[y_1-0.5*d-0.5*d,y_1-0.5*d]
22、其中,d为车辆宽度,d为轮胎宽度;
23、所述底盘经过区间为:
24、[y_1-0.5*d-0.5*d,y_1+0.5*d-0.5*d]。
25、作为本发明实施例技术方案进一步的限定,所述综合所述障碍点区域、所述轮胎经过坐标和所述底盘经过区间,判断车辆是否具有颠簸风险,并在具有颠簸风险时,进行报警提示具体包括以下步骤:
26、判断所述轮胎经过区间是否位于所述障碍点区域内;
27、在所述轮胎经过区间位于所述障碍点区域内时,判定具有颠簸风险时,进行报警提示;
28、在所述轮胎经过区间不位于所述障碍点区域内时,判断所述底盘经过区间是否具有剐蹭风险;
29、在所述底盘经过区间具有剐蹭风险时,判定具有颠簸风险,进行报警提示。
30、作为本发明实施例技术方案进一步的限定,所述在所述轮胎经过区间不位于所述障碍点区域内时,判断所述底盘经过区间是否具有剐蹭风险具体包括以下步骤:
31、在所述轮胎经过区间不位于所述障碍点区域内时,判断所述底盘经过区间是否位于所述障碍点区域内;
32、在所述底盘经过区间位于所述障碍点区域内时,计算障碍高度;
33、根据所述障碍高度,判断所述底盘经过区间是否具有剐蹭风险。
34、一种颠簸路段智能化检测报警系统,所述系统包括双目前视摄像头、辅助驾驶控制器和组合仪表,其中:
35、双目前视摄像头,用于采集车辆的前方道路图像;
36、辅助驾驶控制器,用于根据车辆的前方道路图像和运动状态数据,识别前方预瞄点,并获取预瞄点距离;根据所述运动状态数据,计算车辆的运动轨迹;识别所述前方预瞄点的障碍点区域;根据所述运动轨迹和所述障碍点区域,判断车辆是否具有颠簸风险;
37、组合仪表,用于在具有颠簸风险时,进行报警提示。
38、与现有技术相比,本发明的有益效果是:
39、本发明实施例通过获取车辆的前方道路图像和运动状态数据,识别前方预瞄点,并获取预瞄点距离;根据所述运动状态数据,计算车辆的运动轨迹;识别所述前方预瞄点的障碍点区域;根据所述运动轨迹和所述障碍点区域,判断车辆是否具有颠簸风险,并在具有颠簸风险时,进行报警提示。能够通过双目拍摄,确定前方预瞄点,并计算运动轨迹,识别障碍点区域,判断车辆是否具有颠簸风险,并在具有颠簸风险时,进行报警提示,能够准确检测车辆的颠簸风险,及时进行报警提示,便于驾驶员尽快反应,并对颠簸风险进行提前规避,成本低,且可靠性高。
技术特征:
1.一种颠簸路段智能化检测报警方法,其特征在于,所述方法具体包括以下步骤:
2.根据权利要求1所述的颠簸路段智能化检测报警方法,其特征在于,所述获取车辆的前方道路图像和运动状态数据,识别前方预瞄点,并获取预瞄点距离具体包括以下步骤:
3.根据权利要求1所述的颠簸路段智能化检测报警方法,其特征在于,所述运动轨迹的公式为:
4.根据权利要求3所述的颠簸路段智能化检测报警方法,其特征在于,所述根据所述运动轨迹和所述障碍点区域,判断车辆是否具有颠簸风险,并在具有颠簸风险时,进行报警提示具体包括以下步骤:
5.根据权利要求4所述的颠簸路段智能化检测报警方法,其特征在于,所述预瞄点质心位置为(r,y_1),其中:
6.根据权利要求5所述的颠簸路段智能化检测报警方法,其特征在于,所述轮胎经过区间为:
7.根据权利要求4所述的颠簸路段智能化检测报警方法,其特征在于,所述综合所述障碍点区域、所述轮胎经过坐标和所述底盘经过区间,判断车辆是否具有颠簸风险,并在具有颠簸风险时,进行报警提示具体包括以下步骤:
8.根据权利要求7所述的颠簸路段智能化检测报警方法,其特征在于,所述在所述轮胎经过区间不位于所述障碍点区域内时,判断所述底盘经过区间是否具有剐蹭风险具体包括以下步骤:
9.一种颠簸路段智能化检测报警系统,其特征在于,所述系统包括双目前视摄像头、辅助驾驶控制器和组合仪表,其中:
技术总结
本发明实施例涉及智能驾驶技术领域,具体公开了一种颠簸路段智能化检测报警方法及系统。本发明实施例通过获取车辆的前方道路图像和运动状态数据,识别前方预瞄点,并获取预瞄点距离;根据所述运动状态数据,计算车辆的运动轨迹;识别所述前方预瞄点的障碍点区域;根据所述运动轨迹和所述障碍点区域,判断车辆是否具有颠簸风险,并在具有颠簸风险时,进行报警提示。能够通过双目拍摄,确定前方预瞄点,并计算运动轨迹,识别障碍点区域,判断车辆是否具有颠簸风险,并在具有颠簸风险时,进行报警提示,能够准确检测车辆的颠簸风险,及时进行报警提示,便于驾驶员尽快反应,并对颠簸风险进行提前规避,成本低,且可靠性高。
技术研发人员:陈祖辉
受保护的技术使用者:阿尔特汽车技术股份有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!