一种多气象条件下的航空器所需到达时间控制方法与流程
本发明属于空中交通管理领域,具体是一种多气象条件下的航空器所需到达时间控制方法。
背景技术:
1、随着航空运输业的持续发展,采用当前飞机计划与雷达管制结合的粗放式空管运行模式,已不能满足未来高密度空域的使用需求,亟需建立空地协同的空域运行管理新模式,将管制的中心从地面集中转移至各分布式航空器,为此国际民航界提出将基于四维航迹运行作为未来空中交通运行的新理念,其在传统水平和垂直方向的三维航迹引导的基础上,加入时间控制因素,精确控制飞行时间保证定时到达,从而实现定时到达的四维航迹引导。
2、航空器实现所需到达时间的控制,是指根据空管部门指定的时间约束条件和飞机当前的状态、环境约束等信息,调整飞机各个飞行阶段的速度计划(爬升、巡航和下降),生成速度指令,使航空器满足对某位置点到达时间的要求,当不能满足要求时给出告警。
3、由于气象因素特别是高空风对于飞行速度的影响很大,所以在生成航空器速度调整指令时,需要考虑气象因素对计算模型的影响。
技术实现思路
1、针对下一代机载航电系统面向四维航迹运行理念发展的需求,从时间维度精确控制出发,本发明提出一种多气象条件下的航空器所需到达时间控制方法,通过基于grib气象报源数据的航空器速度修正,结合所需到达时间与预测到达时间的误差迭代控制,实现多气象条件下的航空器精准到达。本发明能够为支持四维航迹运行的机载飞行管理系统与综合航电系统的研制提供技术支持。
2、所述多气象条件下的航空器所需到达时间控制方法,具体步骤如下:
3、步骤一、针对航空器a,根据飞行计划和航空器性能模型,预测生成该航空器后续各航路点的真空速度计划数据;
4、具体包括以下步骤:
5、首先,从航空器a计划信息中获取起飞机场、落地机场、航路点和过点高度等信息,进一步得到该航空器a飞行全过程的经纬度位置及气压高信息;
6、然后,建立基于总能量方程的航空器性能模型,根据计划信息中航空器a在未来各航路点的质量估计值,基于最小二乘法估计未来航空器a各航迹点的真空速度;
7、航空器性能模型如下:
8、
9、其中thr为航空器推力,d为阻力,vtas为航空器真空速度,m为航空器质量,g0为海平面的重力加速度,hp为气压高度,vwind为风速,t为大气温度,δt为采用标准大气模型时产生的温差。
10、该航空器第i个航路点的真空速度,计算公式为:
11、
12、vtasi为航空器第i个航路点的真空速度,mi为航空器第i个航路点的质量,各航路点对应的质量从飞行计划中获取。
13、q为中间变量,通过雷达数据、气象数据获取;power通过航空器性能模型获得;
14、步骤二、建立风模型,根据grib气象报源数据进行解析插值,预测出飞机各航路点位置/高度的高空风速;
15、具体包括以下子步骤:
16、首先,实时获得grib气象报源数据文件,并对其进行解码,读取出气象数据信息,根据等压面与全球经纬度间隔,将气象数据拆分出各经纬度网格点的高空风、温度与对流层顶高度等信息。
17、然后,针对航空器当前的实时位置o(x0,y0),其经纬度相邻的四个grib格点数据分别为:oi,j(xi,yj)、oi,j+1(xi,yj+1)、oi+1,j(xi+1,yj)、oi+1,j+1(xi+1,yj+1);
18、针对和当前位置o(x0,y0)在同一经线上的两个点m(x0,yj+1)和n(x0,yj),其纬度分别和网格数据点的纬度相同;
19、由两点线性插值方式,求得m点的东西方向风的分量u(m):
20、
21、其中u1是oi+1,j+1点的东西方向风分量,u2是oi,j+1点的东西方向风分量。
22、同理,通过类似的线性插值求得m点风的南北方向风的分量v(m),n点风的东西方向风分量u(m)以及南北方向风的分量v(n)。
23、最后,利用同样的方式,求得o点处风的东西方向分量u(o)、南北方向分量v(o),从而得到o点处风的大小和方向:
24、
25、方向
26、
27、步骤三、根据各航路点的高空风速对该航路点的真空速度进行矢量运算修正,得到航空器在该航路点的预测地速值;
28、预测地速的计算公式如下:
29、
30、其中为当前航路点的风向,vwind为当前航路点的风速,vtas为当前航路点的航空器真空速度,vgs为当前航路点的预测地速值,nm为基准方向,wa为风速与地速的夹角方向、da为真空速度与地速夹角、mh为真空速度与基准方向夹角、mc为地速与基准方向夹角。
31、步骤四、设计航空器速度调整控制律,迭代解算该控制律调整后的各航路点地速值对应的预计到达时间;
32、速度调整控制律为:
33、
34、其中vgs_cmd为更新后的航空器地速值,kp和kd为速度调整因子,为纵向距离误差的微分信号,为纵向距离误差;表示为
35、
36、dr当前地速在所需到达时间的期望距离,di为当前距离第i个航路点的距离;rtai为航空器在第i个航路点的所需到达时间,etai为按照当前地速到达第i个航路点的预计时间;
37、步骤五、判断预计到达时间与所需到达时间之间的误差是否满足阈值要求,如果是,则对应的调整地速值即为航空器实现定时到达的目标速度,结束迭代过程;否则执行步骤六。
38、时间误差公式为:
39、
40、步骤六、判断是否超出最大设定迭代次数,如果是,则结束迭代过程;否则返回步骤四,重复执行直至结束迭代过程。
41、当超出最大设定迭代次数,表示在性能限制内不可通过调整速度实现所需rta,反馈“rta无法实现”消息指示。
42、本发明具有如下技术效果:
43、本发明一种多气象条件下的航空器所需到达时间控制方法,为多种气象条件下的航空器时间维度控制提供了技术支持;为下一代空管航电系统实现定时到达控制提供技术支撑。
技术特征:
1.一种多气象条件下的航空器所需到达时间控制方法,其特征在于,具体步骤如下:
2.如权利要求1所述的一种多气象条件下的航空器所需到达时间控制方法,其特征在于,所述步骤一中,从航空器a计划信息中获取起飞机场、落地机场、航路点和过点高度信息,进一步得到该航空器a飞行全过程的经纬度位置及气压高信息;
3.如权利要求1所述的一种多气象条件下的航空器所需到达时间控制方法,其特征在于,所述步骤二,具体包括以下子步骤:
4.如权利要求1所述的一种多气象条件下的航空器所需到达时间控制方法,其特征在于,所述步骤四中,速度调整控制律为:
5.如权利要求1所述的一种多气象条件下的航空器所需到达时间控制方法,其特征在于,所述步骤六,当超出最大设定迭代次数,表示在性能限制内不可通过调整速度实现所需rta,反馈“rta无法实现”消息指示。
技术总结
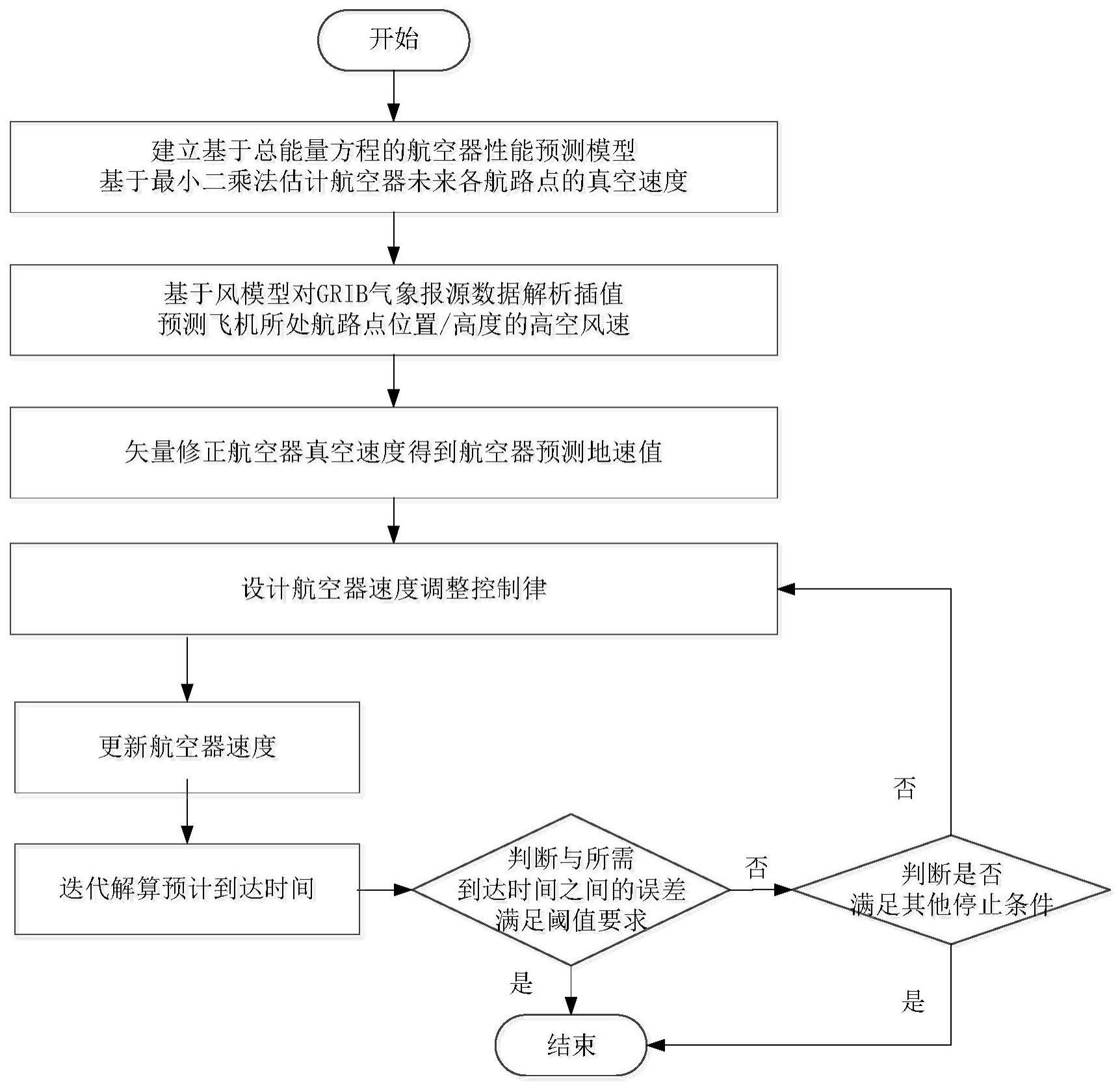
本发明公开了一种多气象条件下的航空器所需到达时间控制方法,属于空中交通管理领域;具体为:首先建立基于总能量方程的航空器性能预测模型,基于最小二乘法估计航空器未来各航迹点的真空速度;其次对GRIB气象报源数据进行解析插值,预测出飞机所处航路点位置/高度的高空风速,并对航空器真空速度进行矢量运算修正,得到航空器在该航路点的地速值;接着,设计航空器速度调整控制律,迭代解算该控制律作用下的预计到达时间,当与所需到达时间之间的误差满足阈值要求或其他停止条件时对应的调整速度,即为航空器实现定时到达的目标速度。本发明能够为支持四维航迹运行的机载飞行管理系统与综合航电系统的研制提供技术支持。
技术研发人员:蒲钒,朱永文,刘杨,王长春,唐治理,周忠华
受保护的技术使用者:中国人民解放军93209部队
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!