一种基于电单车头盔侦测处理闯红灯的方法及电单车与流程
本发明涉及电单车,尤其涉及一种基于电单车头盔侦测处理闯红灯的方法及电单车。
背景技术:
1、随着出行方式的多样化,共享电单车便捷舒适、绿色低碳的优点,日益受到广大市民的青睐,有效解决从停车点到目的地“最后一公里”的难题。然而,在日常出行过程中,经常能够看到用户骑行共享电单车闯红灯的现象,容易造成交通事故,破坏公共交通秩序,严重威胁自己和他人的生命财产安全。
2、目前,针对共享电单车的可能会出现闯红灯没有提前预警提示的检测/管控方式,现有技术仅仅依靠设置在道路上的道路监控设备(摄像机)的方式进行抓拍,这种方式难以准确匹配到电单车对应的用户,即使抓拍匹配到具体的骑行者,该骑行者也已经发生了闯红灯现象,难以有效缓解共享电单车的闯红灯现象。
3、鉴于此,有必要提出一种基于电单车头盔侦测处理闯红灯的方法及电单车以解决或至少缓解上述缺陷。
技术实现思路
1、本发明的主要目的在于提供一种基于电单车头盔侦测处理闯红灯的方法及电单车,以解决针对共享电单车的可能会出现闯红灯现象没有提前预警提示的检测/管控方式,导致骑行过程容易出现安全隐患的问题。
2、为实现上述目的,本发明提供了一种基于电单车头盔侦测处理闯红灯的方法,包括步骤:
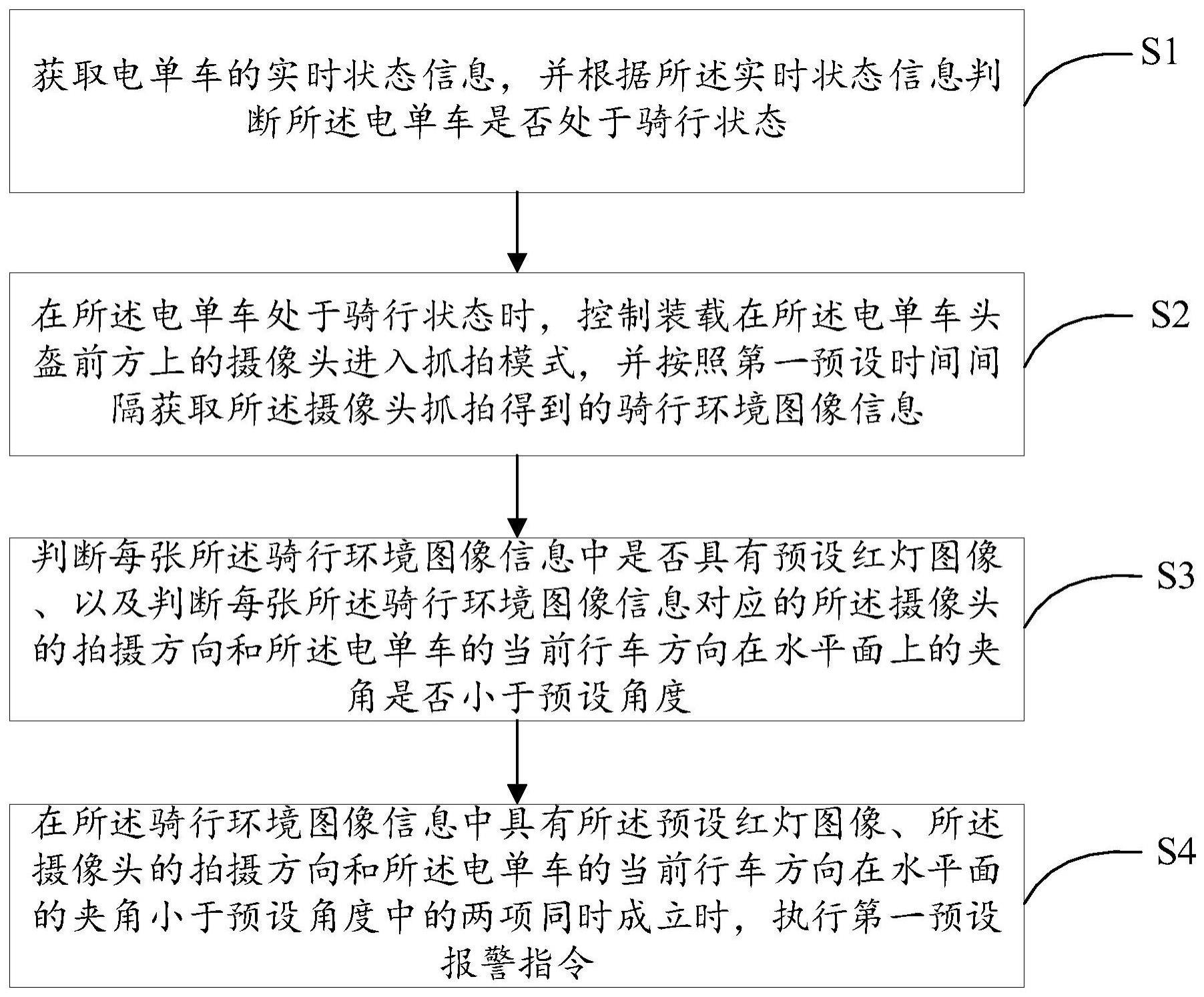
3、s1,获取电单车的实时状态信息,并根据所述实时状态信息判断所述电单车是否处于骑行状态;
4、s2,在所述电单车处于骑行状态时,控制装载在所述电单车头盔前方上的摄像头进入抓拍模式,并按照第一预设时间间隔获取所述摄像头抓拍得到的骑行环境图像信息;
5、s3,判断每张所述骑行环境图像信息中是否具有预设红灯图像、以及判断每张所述骑行环境图像信息对应的所述摄像头的拍摄方向和所述电单车的当前行车方向在水平面上的夹角是否小于预设角度;
6、s4,在所述骑行环境图像信息中具有所述预设红灯图像、所述摄像头的拍摄方向和所述电单车的当前行车方向在水平面的夹角小于预设角度中的两项同时成立时,执行第一预设报警指令。
7、优选地,所述步骤s4之后还包括步骤:
8、s51,确定所述骑行环境图像信息中的红灯图像与所述摄像头之间的理论计算距离;
9、s52,在所述理论计算距离小于第一预设距离时,执行第二预设报警指令;
10、s53,在所述理论计算距离处于第一预设距离和第二预设距离之间时,获取所述电单车的当前运行速度,并根据所述理论计算距离和所述当前运行速度确定所述电单车运动至所述骑行环境图像信息中的红灯图像位置所需要的理论计算时间;
11、s54,判断所述理论计算时间是否小于时间设定值;其中,所述第二预设距离大于所述第一预设距离;
12、s55,在所述理论计算时间小于时间设定值时,执行第三预设报警指令;
13、s56,在所述理论计算时间大于或等于时间设定值或者在所述理论计算距离大于所述第二预设距离时,维持所述电单车的当前状态。
14、优选地,所述步骤s3之后还包括步骤:
15、在所述骑行环境图像信息中具有所述预设红灯图像、所述摄像头的拍摄方向和所述电单车的当前行车方向在水平面的夹角小于预设角度中的两项中任意一项不成立时,维持所述电单车的当前状态。
16、优选地,所述步骤s51具体包括步骤:
17、s511,确定所述骑行环境图像信息中的红灯图像区域面积;
18、s512,根据公式确定出所述骑行环境图像信息中的红灯图像与所述摄像头之间的理论计算距离;其中,s1为所述摄像头与红灯距离为d1时的红灯图像区域面积,s2为所述摄像头与红灯图像距离为d2时的红灯图像区域面积。
19、优选地,所述步骤s4之后还包括步骤:
20、s41,判断所述骑行环境图像信息是否具有预设闯红灯车辆图像;
21、s42,在所述骑行环境图像信息中具有预设闯红灯车辆图像时,将所述骑行环境图像信息发送给目标对象;
22、s43,在所述骑行环境图像信息中不具有预设闯红灯车辆图像时,返回步骤s1。
23、优选地,所述步骤s3之后还包括步骤:
24、s31,在所述骑行环境图像信息中不具有预设红灯图像、所述摄像头的拍摄方向和所述电单车的当前行车方向在水平面的夹角小于预设角度中的两项同时成立时,判断所述骑行环境图像信息中是否具有目标障碍物;
25、s32,在所述骑行环境图像信息中具有所述目标障碍物时,将所述第一预设时间间隔调整为第二预设时间间隔;其中,所述第二预设时间间隔小于所述第一预设时间间隔。
26、优选地,所述步骤s32之后还包括步骤:
27、s33,从首次检测到有所述目标障碍物之后的第二预设时长结束时的第一时间节点,判断对应的骑行环境图像信息是否具有目标障碍物;
28、s34,在所述骑行环境图像信息不具有所述目标障碍物时,将所述第二预设时间间隔调整为所述第一时间间隔;
29、s35,在所述骑行环境图像信息具有所述目标障碍物时,维持所述摄像头按照所述第二预设时间间隔继续抓拍。
30、优选地,所述步骤s4之后还包括步骤:
31、s401,获取在当前时刻之前的第三预设时长内所述电单车的历史位置数据并根据所述历史位置数据集确定出所述电单车的矢量运动路径;
32、s402,根据所述电单车当前时刻所处的当前位置以及所述矢量运动路径判断位于所述电单车后方、且距离所述当前位置在预设范围的区域内是否具有目标共享车辆;其中,所述目标共享车辆与所述电单车通信连接;
33、s403,在所述电单车后方、且距离所述当前位置在预设范围的区域内具有目标共享车辆时,向所述目标共享车辆发送预设提醒指令。
34、本发明还提供一种电单车,包括车体、头盔以及设置在所述车体内的控制系统;其中,所述头盔设有与所述控制系统通信连接的控制模块,所述头盔的前方安装有用于获取骑行环境图像的摄像头,所述摄像头与所述控制模块连接,所述控制系统包括存储器、处理器、以及存储在所述存储器中并可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现如上述的基于电单车头盔侦测处理闯红灯的方法的步骤。
35、与现有技术相比,本发明具有如下的有益效果:
36、本发明提供一种基于电单车头盔侦测处理闯红灯的方法及电单车,通过获取电单车的实时状态信息,在电单车处于骑行状态时,控制装载在电单车头盔前方上的摄像头进入抓拍模式,并按照第一预设时间间隔获取摄像头抓拍得到的骑行环境图像信息,在骑行环境图像信息中具有预设红灯图像、摄像头的拍摄方向和电单车的当前行车方向在水平面的夹角小于预设角度中的两项同时成立时,执行第一预设报警指令。本发明能够通过头盔上的摄像头能够检测出红灯图像,及时提前进行预警提醒,尽可能避免用户在骑行过程中闯红灯,提高出行安全性,具有时效性高、检测效率高的优点。
技术特征:
1.一种基于电单车头盔侦测处理闯红灯的方法,其特征在于,包括步骤:
2.根据权利要求1所述的基于电单车头盔侦测处理闯红灯的方法,其特征在于,所述步骤s4之后还包括步骤:
3.根据权利要求1所述的基于电单车头盔侦测处理闯红灯的方法,其特征在于,所述步骤s3之后还包括步骤:
4.根据权利要求2所述的基于电单车头盔侦测处理闯红灯的方法,其特征在于,所述步骤s51具体包括步骤:
5.根据权利要求1所述的基于电单车头盔侦测处理闯红灯的方法,其特征在于,所述步骤s4之后还包括步骤:
6.根据权利要求1所述的基于电单车头盔侦测处理闯红灯的方法,其特征在于,所述步骤s3之后还包括步骤:
7.根据权利要求6所述的基于电单车头盔侦测处理闯红灯的方法,其特征在于,所述步骤s32之后还包括步骤:
8.根据权利要求1所述的基于电单车头盔侦测处理闯红灯的方法,其特征在于,所述步骤s4之后还包括步骤:
9.一种电单车,其特征在于,包括车体、头盔以及设置在所述车体内的控制系统;其中,所述头盔设有与所述控制系统通信连接的控制模块,所述头盔的前方安装有用于获取骑行环境图像的摄像头,所述摄像头与所述控制模块连接,所述控制系统包括存储器、处理器、以及存储在所述存储器中并可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现如权利要求1至8任一项所述的基于电单车头盔侦测处理闯红灯的方法的步骤。
技术总结
本发明提供一种基于电单车头盔侦测处理闯红灯的方法及电单车,通过获取电单车的实时状态信息,在电单车处于骑行状态时,控制装载在电单车头盔前方上的摄像头进入抓拍模式,并按照第一预设时间间隔获取摄像头抓拍得到的骑行环境图像信息,在骑行环境图像信息中具有预设红灯图像、摄像头的拍摄方向和电单车的当前行车方向在水平面的夹角小于预设角度中的两项同时成立时,执行第一预设报警指令。本发明能够通过头盔上的摄像头能够检测出红灯图像,及时提前进行预警提醒,尽可能避免用户在骑行过程中闯红灯,提高出行安全性,具有时效性高、检测效率高的优点。
技术研发人员:杨峰,魏海宏,欧阳博宇,刘先鹏,张红金,孙大伟,罗庆武
受保护的技术使用者:湖南喜宝达信息科技有限公司
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!