一种数据处理方法、装置及电子设备与流程
本申请涉及智能驾驶,尤其涉及一种数据处理方法、装置及电子设备。
背景技术:
1、随着智能驾驶技术的不断发展,诸如自适应巡航控制,前向碰撞预警系统等辅助驾驶功能在车上的使用越来越广泛。车辆行驶在道路上不可避免会处于跟车状态,辅助驾驶系统在控制跟车距离如果能够符合用户的跟车习惯,会极大提高用户的使用体验。因此系统需要学习用户的驾驶习惯,这需要从用户大量的真实驾驶数据中提取出稳定的跟车数据,进而获得更真实的实时跟车片段。
2、现有技术中,一种是通过大量工作人员打标签的方式从采集的大量驾驶数据中提取跟车场景,这种方法不仅费时费力,效率低下,且提取标注因人而异,数据参差不齐,使用效果不佳,而不同司机跟车习惯不同,同一司机不同时间不同场景跟车习惯也可能发生变化,因此人工采集的数据没有整齐的数据帧,无法对获取的数据帧做进一步分析,难以得到实时跟车状态下的跟车片段。
3、另一种是基于车辆感知数据,简单地判断前后车是否在同车道,速度差大小,距离大小等方式来提取跟车场景,只考虑了车辆当前行驶速度、距离等变量的变化,未考虑各变量之间的相互关系,以及在时间维度上车辆跟车状态是否稳定,获取的目标车辆标识没有根据目标前车的切换而做进一步分析,获得的跟车数据无法灵活应对状况复杂的车道。
技术实现思路
1、本申请提供了一种数据处理方法、装置及电子设备,用于实现自动分析实时的车辆数据,判断分析得到的数据结果是否稳定,融合稳定的结果以获得跟车片段。
2、第一方面,本申请提供了数据处理方法,将所有采集的数据帧组成数据帧序列,从数据帧序列中挖掘并融合满足阈值条件的子数据帧序列,输出得到跟车片段。
3、本发明提供的数据处理方法包括:
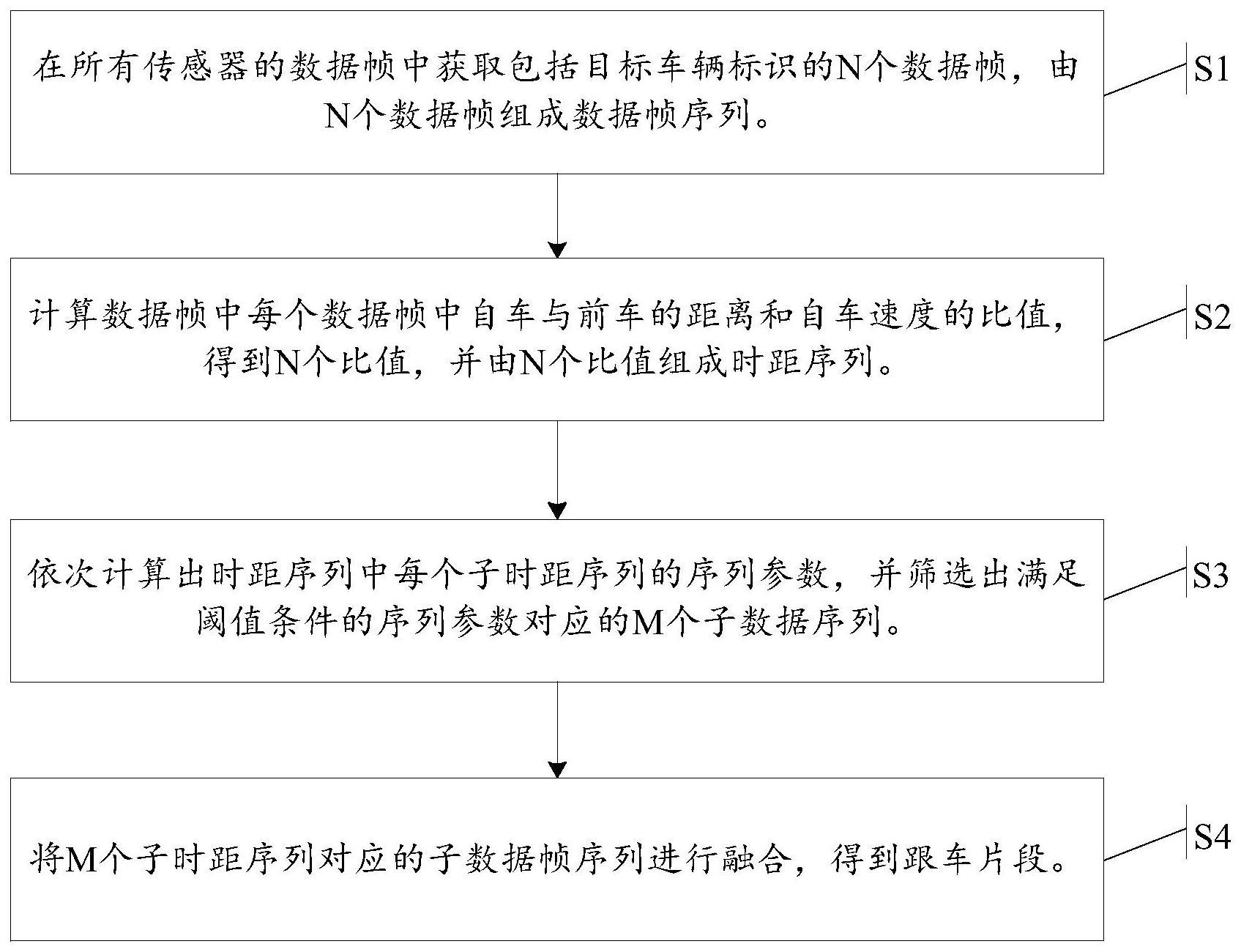
4、在所有传感器采集的数据帧中获取包括目标车辆标识的n个数据帧,并由n个数据帧组成数据帧序列;
5、计算数据帧序列中每个数据帧中自车与前车的距离和自车速度的比值,得到n个比值,并由n个比值组成时距序列;
6、依次计算出时距序列中每个子时距序列的序列参数,并筛选出满足阈值满足条件的序列参数对应的m个子时距片段;
7、将上述m个子时距序列对应的子数据帧序列进行融合,得到跟车片段,其中,上述子数据帧序列为数据帧序列中的子序列,子时距序列与子数据帧序列一一对应。
8、可选的,根据传感器采集的所述n个数据帧的时间戳信息,取得所有数据帧的最大时间戳和最小时间戳;
9、在所述所有数据帧的最大时间戳和最小时间戳之间的时间区间上,以t为周期,进行等距划分,得到时间刻度序列;
10、通过时间刻度序列在不同感器输出的数据帧中找到对应的数据帧时间戳,将所有传感器输出的数据帧时间戳一一对齐,得到对齐后的数据帧序列。
11、基于上述的方法,能够通过各个传感器采集多种数据的数据帧,并传感器为数据帧添加的时间区间刻度将数据帧对齐,得到对齐后的数据帧序列。
12、优选的,在上述时距序列中按照时间窗框取出各个子时距序列;
13、依次计算每个子时距序列的方差和极差。
14、可选的,若上述子时距序列的序列参数不满足阈值条件,将上述子时距序列切割为k个子时距片段;
15、计算上述k个时距片段的序列参数;
16、在上述k个时距片段中筛选出序列参数满足阈值条件的j个时距片段,并将j个时距序列片段融合到跟车片段中。
17、优选的,计算上述m个子时距序列的序列参数,并对每个子时距序列采用非线性最小二乘法拟合直线,得到每个子时距序列的直线斜率;
18、在上述m个子时距序列中筛选出满足阈值条件的子时距序列,将满足阈值条件的子时距序列对应的子数据帧序列融合,得到跟车片段。
19、基于上述的方法,能够在方差和极差不满足阈值条件的至少包括一个子时距序列中,利用切割法筛选出多个方差和极差满足阈值条件的时距片段,将筛选出来的包括多个子时距序列或者时距片段融合,生成跟车片段。
20、第二方面,本申请提供了一种数据处理装置,包括:
21、获取模块,在所有传感器采集的数据帧中获取包括目标车辆标识的n个数据帧,并由n个数据帧组成数据帧序列;
22、计算模块,计算上述数据帧序列中每个数据帧中自车与前车的距离和自车速度的比值,得到n个比值,并由n个比值组成时距序列;
23、筛选模块,依次计算出上述时距序列中每个子时距序列的序列参数,并筛选出满足阈值条件的上述序列参数对应的m个子时距序列;
24、生成模块,将上述m个子时距序列对应的子数据帧序列进行融合,得到跟车片段,其中,上述子数据帧序列为所述数据帧序列中的子序列,上述子时距序列与子数据帧序列一一对应。
25、可选的,上述获取模块具体用于根据传感器采集的所述n个数据帧的时间戳信息,计算得到不同传感器采集的第一帧数据帧的时间戳之间的差值;
26、根据所述时间戳之间的差值,为第一传感器输出的数据帧的时间戳附加一个时间刻度,得到新的时间戳;
27、通过新的时间戳在第二传感器输出的数据帧中找到对应的数据帧时间戳,将第一传感器和第二传感器输出的数据帧时间戳一一对齐,得到对齐后的数据帧序列。
28、优选的,上述计算模块具体用于在所述时距序列中按照时间窗框取出各个子时距序列;
29、依次计算每个子时距序列的方差和极差。
30、第三方面,本申请提供了一种电子设备,包括:存储器,用于存放计算机程序;
31、处理器,用于执行所述存储器上所存放的计算机程序时,实现上述数据处理方法的步骤。
32、第四方面,本申请还提供了一种计算机可读存储介质,所述计算机可读存储介质内存储由计算机程序,所述计算机程序被处理器执行时实现上述数据处理方法的步骤。
33、上述第二方面至第四方面中的各个方面以及各个方面可能达到的技术效果请参照上述针对第一方面或第一方面中的各种可能方案可以达到的技术效果说明,这里不再重复赘述。
技术特征:
1.一种数据处理方法,其特征在于,包括:
2.如权利要求1所述的方法,其特征在于,所述由n个数据帧组成数据帧序列,包括:
3.如权利要求1所述的方法,其特征在于,依次计算出所述时距序列中每个子时距的序列参数,包括:
4.如权利要求1所述的方法,其特征在于,所述方法还包括:
5.如权利要求1所述的方法,其特征在于,将所述m个子时距序列对应的子数据帧序列进行融合,包括:
6.一种数据处理装置,其特征在于,所述装置包括:
7.如权利要求6所述的数据处理装置,其特征在于,所述获取模块,具体用于根据传感器采集的所述n个数据帧的时间戳信息,取得所有数据帧的最大时间戳和最小时间戳;
8.如权利要求6所述的数据处理装置,其特征在于,所述计算模块,具体用于在所述时距序列中按照时间窗框取出各个子时距序列;
9.一种电子设备,其特征在于,包括:
10.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质内存储有计算机程序,所述计算机程序被处理器执行时实现权利要求1-5任一项所述的方法步骤。
技术总结
本申请提供了一种数据处理方法、装置及电子设备,涉及智能驾驶领域。在本申请中,首先在所有传感器采集的数据帧中获取包括目标车辆标识的N个数据帧,并由N个数据帧组成数据帧序列;计算数据帧序列中每个数据帧中自车与前车的距离和自车速度的比值,得到N个比值,并由N个比值组成时距序列;依次计算出时距序列中每个子时距序列的序列参数,并筛选出满足阈值条件的序列参数对应的M个子时距序列;将M个子时距序列对应的子数据帧序列进行融合,得到跟车片段。采用这种方式,不仅能够自动采集和分析车辆数据,还能筛选车辆数据并生成稳定的跟车片段。
技术研发人员:陈代斌,文威,兰祥琪
受保护的技术使用者:浙江吉利控股集团有限公司
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!