一种基于视觉的停车场车辆精确定位方法和系统与流程
本发明涉及车辆定位,具体地说是一种基于视觉的停车场车辆精确定位方法和系统。
背景技术:
1、近年来,随着科技的不断进步和人们生活水平的提高,越来越多的人选择购买私家车。随着汽车的增加,对停车场的要求也越来越高,尤其是有的停车场甚至不只是一层。为了避免车主在寻找车辆的过程中迷失方向,需要知道汽车在停车场中的准确位置;
2、考虑到不同停车场的场景差异性,传统的基于蓝牙或gps的无线信号的定位和导航技术难以覆盖所用的应用场景,比如在地下停车库内特定区域的金属结构或者电气设备对无线定位测量造成影响,包括无线信号遮挡、绕射、反射多径以及电磁干扰等;
3、专利号为cn106169247a的中国专利中提供了一种基于视觉与地图的停车库室内定位与微导航系统及方法。该系统虽然能够不依赖gps信号对用户停车位置进行定位,并结合移动设备所携带传感器进行导航。但是用户需要下载车库地图或者调用已经下载好的车库地图,并拍摄所在位置的停车位或者车库标识才能生成路径实时导航;
4、专利号为cn109961476a提出了基于视觉的地下停车场的定位方法,必须通过车辆上架设的单目摄像头来实现定位,结构简单,无法实现导航功能。
技术实现思路
1、为了解决上述技术问题,本发明提供一种基于视觉的停车场车辆精确定位方法和系统,以解决背景技术中提出的问题。
2、根据本公开的第一方面,提供了一种基于视觉的停车场车辆精确定位方法和系统,包括以下步骤:
3、s1、在测量节点处固定位置安装摄像头,摄像头安装高度为h,并根据车辆到达方向设置摄像头数量;
4、s2、基于直接的几何测量方法,通过摄像头与车牌的位置关系完成对车辆位置d的测量,由摄像头安装过程直接测量得到摄像头安装下倾角α,车牌安装高度固定,车辆位置角为β;
5、s3、摄像头启动检测初期,通过运行神经网络进行视觉数据捕获,获取帧图像,然后进行视觉跟踪定位,将检测位置反馈至用户导航信息。
6、优选的,所述摄像头为rgb摄像头,视觉定位终端通过rgb摄像头获取车辆的车牌信息和位置信息,通过信息处理算法,同时进行多辆车的测量。
7、优选的,所述车牌安装高度误差通过车辆类型识别模型修正。
8、优选的,所述摄像头的安装下倾角和安装高度的精确标定通过简单的额外地面标志进行自校准。
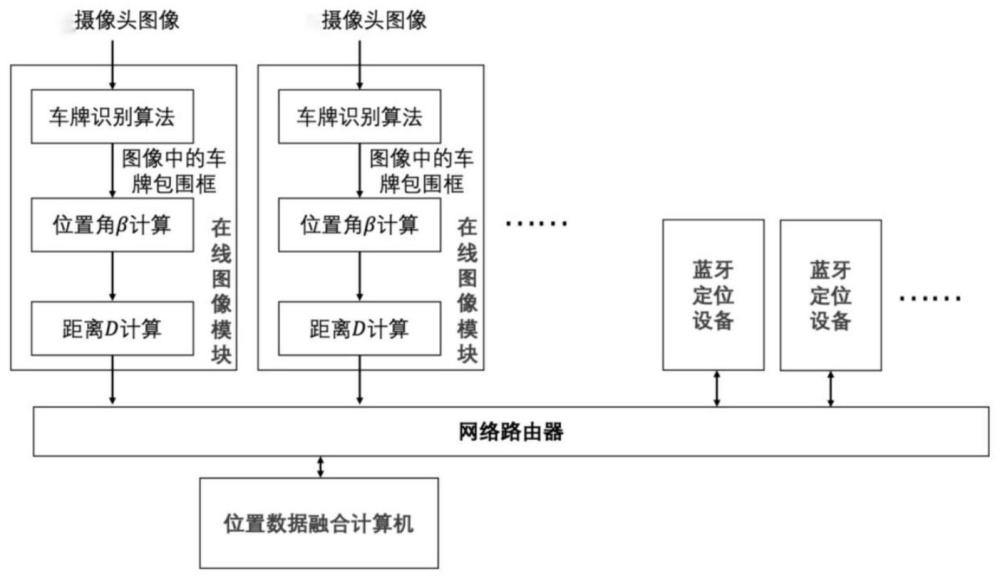
9、根据本公开的第二方面,提供了一种基于视觉的停车场车辆精确定位系统,包括在线图像模块、位置数据融合计算机和蓝牙定位设备。
10、优选的,所述在线图像模块还包括摄像机及摄像机侧带有信息处理算法,进行多辆车测量和导航,通过摄像头获取图像信息,进行车牌识别算法,获取图像中的车牌包围框,计算位置角β和水平距离d;
11、所述位置融合计算机实时分配摄像头的监控任务,基于蓝牙定位设备得到车辆大致空间区域信息分配不同的摄像头关注,并执行测量。
12、与现有技术相比,本发明具有如下有益效果:
13、1、本发明设置视觉定位终端,终端通过rgb摄像头获取车辆的车牌信息和位置信息,通过信息处理算法,能够同时进行多辆车的测量。
14、2、本发明通过固定安装位置的摄像头实现视觉定位,rgb摄像头获取到车辆的车牌信息和位置信息,测量计算位置角得到车辆距摄像头的水平距离,基于直接的几何测量方法测量车辆位置,并将检测位置反馈至用户导航信息中进行定位。
15、3、本发明通过信息处理算法在摄像机一侧在线完成,降低了位置融合计算机的算力,使得能够同时进行多辆车的测量,实现同时指挥多辆车的导航服务,提高了运行效率,利用位置融合计算机全局地进行任务分配,根据车辆距离指定执行跟踪的摄像机、降低重复运算量并优化测量精度。
技术特征:
1.一种基于视觉的停车场车辆精确定位方法,其特征在于,包括以下步骤:
2.如权利要求1所述一种基于视觉的停车场车辆精确定位方法,其特征在于:所述摄像头为rgb摄像头,视觉定位终端通过rgb摄像头获取车辆的车牌信息和位置信息,通过信息处理算法,同时进行多辆车的测量。
3.如权利要求1所述一种基于视觉的停车场车辆精确定位方法,其特征在于:所述车牌安装高度误差通过车辆类型识别模型修正。
4.如权利要求1所述一种基于视觉的停车场车辆精确定位方法,其特征在于:所述摄像头的安装下倾角和安装高度的精确标定通过简单的额外地面标志进行自校准。
5.一种基于视觉的停车场车辆精确定位系统,其特征在于:包括在线图像模块、位置数据融合计算机和蓝牙定位设备。
6.如权利要求1所述一种基于视觉的停车场车辆精确定位系统,其特征在于:所述在线图像模块还包括摄像机及摄像机侧带有信息处理算法,进行多辆车测量和导航,通过摄像头获取图像信息,进行车牌识别算法,获取图像中的车牌包围框,计算位置角β和水平距离d;
技术总结
本发明涉及车辆定位技术领域,提供了一种基于视觉的停车场车辆精确定位方法和系统,包括以下步骤:在测量节点处固定位置安装摄像头,摄像头安装高度为H,并根据车辆到达方向设置摄像头数量;基于直接的几何测量方法对车辆位置测量,由摄像头安装过程直接测量得到摄像头安装下倾角α,车牌安装高度固定;测量的基准点为车牌中心,由图像光学模型计算车辆位置角β和车辆距离D;通过运行神经网络进行视觉数据捕获,获取帧图像,进行视觉跟踪定位,将检测位置反馈至用户导航信息;本发明通过基于视觉的精准定位方法,结合蓝牙定位技术,消除车辆位置的不确定因素,呈现给最终用户统一的、高质量的定位结果,用于车辆在停车场的导航导引。
技术研发人员:周燕
受保护的技术使用者:上海美迪索科电子科技有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!