人机混合驾驶环境下信号交叉口车流编队优化控制方法
本发明属于交通工程领域,是一种人机混合驾驶交通流编队通行信号交叉口的优化控制方法,旨在提高交叉口的通行效率。
背景技术:
1、当前,随着智能网联汽车不断向道路交通渗透,网联自动驾驶汽车、网联人工驾驶汽车和传统的人工驾驶汽车组成的人机混合驾驶交通流正在成为道路交通的一种常态。
2、研究表明,人机混合驾驶环境下,交叉口进口车道饱和流率与网联自动驾驶汽车(cav)渗透率呈非线性增长关系。可见,智能网联汽车有助于挖掘道路资源通行潜力、提升路网的交通容量。然而,既有相关技术仍存在如下缺陷:(1)同等cav渗透率下,尚未理清人机混合驾驶交通流不同编队通行模式对车道饱和流率影响的大小,导致道路资源挖潜的能力仍较为粗糙;(2)尚未建立信号交叉口最有利的编队通行模式实现方法,先到先服务的编队通行模式使交叉口通行效率的提升陷入了瓶颈。
3、基于此,提出一种人机混合驾驶环境下信号交叉口车流编队优化控制方法,以提高交叉口的通行能力。
技术实现思路
1、本发明的目的在于提供一种人机混合驾驶环境下信号交叉口车流编队优化控制方法,以最大程度地挖掘人机混合驾驶环境下信号交叉口的通行潜力。
2、本发明涉及人机混合驾驶环境下信号交叉口车流编队优化控制方法,包括如下步骤:
3、步骤一、对人机混合驾驶环境下信号交叉口进口车道可能的编队模式进行分类;
4、步骤二、确定每种编队模式的通行效率,并将通行效率最高的编队模式选作目标编队模式;
5、步骤三、采取二次停车法将先到先服务的编队模式重组为目标编队模式,实现交叉口通行效益的最大化;
6、进一步地,步骤一中,按照先来先服务的原则,人机混合驾驶环境下,交叉口进口车道可能的编队模式有如下4种。其中,以网联自动驾驶汽车和网联人工驾驶汽车/传统的人工驾驶汽车为头车的编队模式各2种,在这些编队模式中,△表示网联自动驾驶车,○表示网联人工驾驶汽车或传统的人工驾驶汽车。
7、(1)网联自动驾驶汽车为头车
8、ⅰ
9、
10、ⅱ
11、
12、(2)网联人工驾驶汽车/传统的人工驾驶汽车为头车
13、ⅲ
14、
15、ⅳ
16、
17、其中,n、m、p、q均为整数。
18、进一步地,步骤二中,在cav渗透率和输入交通量不变的情况下,将4种编队模式的通行效益分别记作s(1)、s(2)、s(3)、s(4),各自的计算方法确定如下:
19、
20、
21、
22、式中:tr为驾驶员反应时间(s),一般取1s,ha1为前方无人工驾驶车辆阻挡时全cavs的饱和车头时距(s/veh),ha2为前方有人工驾驶车辆阻挡时全cavs的饱和车头时距(s/veh),τa为相邻cavs通信延迟时间(s),τr为相邻人工驾驶车反应延迟时间(s),la为cav启动损失时间(s),lr为人工驾驶车启动损失时间(s),m为cav车辆数(veh),n为人工驾驶汽车车辆数(veh)。
23、按从小到大进行排序,确定目标编队模式。排序的结果如下:
24、s(1)<s(2)<s(3)=s(4)
25、由此确定,人机混合驾驶环境下,第1种编队模式为最优的编队模式,即为目标编队模式。
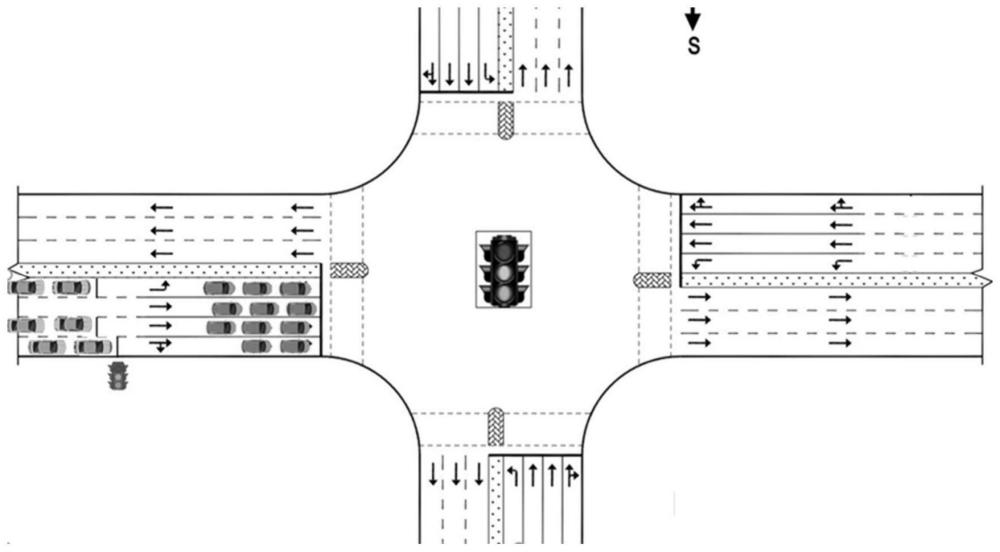
26、进一步地,步骤三中,除与左转车道相邻的直行车道外,其他所有进口车道在交叉口停车线后另设置一条停车线,称为第二停车线,并安装相应的交通信号灯,见图1所示,用于将混行的人工驾驶车和cavs整合成第1种编队模式,具体方法如下:
27、第二停车线处交通信号灯为红灯时,所有人工驾驶车辆均在此停车线后等待绿灯通行,而与左转车道相邻的直行车道此时临时设定为cav专用车道,供左转cavs、直行及右转cavs通行,以便插入全部人工驾驶车辆的前面,实现自动驾驶汽车与人工驾驶汽车的分离。第二停车线处交通信号灯为绿灯时,与左转车道相邻的直行车道此时变回混合驾驶直行车道,其他车道排队的人工驾驶车驶出第二停车线与交叉口停车线后排队的cavs顺利衔接,完成第1种编队模式的整合。
28、为了保证红灯期间到达的cavs全部能排在人工驾驶汽车的前面,第二停车线与交叉口停车线的间距要求如下:
29、
30、式中,l为第二停车线与交叉口停车线的最小间距(m),qp,max为进口道第p相位红灯期间cav达到的最大车辆数(pcu),可通过历史采集数据得到,pi为进口道第p相位包含的车道数量,dai为排队时cav之间的安全距离(m),da为cav车长(m),d为车道宽度(m),θ为cav越过第二停车线后变道与车道中心线所成的夹角。
31、l确定后,该长度一般为最内侧左转车道或最外侧直行车道第二停车线的布设位置,当相位中车道条数大于1时,相邻车道第二停车线依次向后退d的间距,即可满足车辆变道的要求。
32、为确保从第二停车线驶出的车辆能与交叉口停车线后排队的cavs顺利衔接,交叉口信号灯与第二停车线信号灯之间应协调控制,即同相位第二停车线信号灯相对交叉口信号灯应提前开启,考虑最不利的情况,提前开启的时间为:
33、
34、式中,v为车辆在交叉口的目标行驶速度(m/s),a为车辆正常的加速度(m/s2)。
35、此外,在交叉口信号灯关闭绿灯前,还需清空第二停车线与交叉口停车线之间的全部车辆,为下一信号周期该相位编队模式的整合做准备。因此,第二停车线的绿灯应在交叉口停车线绿灯结束前关闭,提前关闭的时间为
36、
37、式中,lmax为相位所有车道中第二停车线最远的长度(m),v1为相位绿灯期间最不利的车速(m/s)。
38、有益效果
39、本发明提出了一种人机混合驾驶环境下信号交叉口车流编队优化控制方法,利用网联自动驾驶车的高通行效率与高可控性,通过两条停车线和交通信号灯的控制,将先到先服务的混合编队模式重组为网联自动驾驶车在前、人工驾驶车在后的目标编队模式,实现交叉口通行效益的最大化。本发明适用于人机混合驾驶交通环境,因网联驾驶车辆的高通行效率和高可控性,将网联自动驾驶车与人工驾驶车从空间上分离,可提高交叉口通行效率10%以上,应用前景十分广泛。
技术特征:
1.一种人机混合驾驶环境下信号交叉口车流编队优化控制方法,其特征在于,包括如下步骤:
2.根据权利要求1所述的人机混合驾驶环境下信号交叉口车流编队优化控制方法,其特征在于,步骤一中,按照先来先服务的原则,人机混合驾驶环境下,交叉口进口车道可能的编队模式有如下4种。其中,以网联自动驾驶汽车和网联人工驾驶汽车/传统的人工驾驶汽车为头车的编队模式各2种,在这些编队模式中,△表示网联自动驾驶车,○表示网联人工驾驶汽车或传统的人工驾驶汽车。
3.根据权利要求1所述的人机混合驾驶环境下信号交叉口车流编队优化控制方法,其特征在于,步骤二中,在cav渗透率和输入交通量不变的情况下,将4种编队模式的通行效益分别记作s(1)、s(2)、s(3)、s(4),各自的计算方法确定如下:
4.根据权利要求1所述的人机混合驾驶环境下信号交叉口车流编队优化控制方法,其特征在于,步骤三中,除与左转车道相邻的直行车道外,其他所有进口车道在交叉口停车线后另设置一条停车线,称为第二停车线,并安装相应的交通信号灯,见图1所示,用于将混行的人工驾驶车和cavs整合成第1种编队模式,具体方法如下:
技术总结
本发明涉及一种人机混合环境下信号交叉口车流编队优化控制方法,包括如下步骤:步骤一、对人机混合驾驶环境下信号交叉口进口车道可能的编队模式进行分类;步骤二、确定每种编队模式的通行效率,并将通行效率最高的编队模式选作目标编队模式;步骤三、采取二次停车法将先到先服务的编队模式重组为目标编队模式,实现交叉口通行效益的最大化。本发明适用于人机混合驾驶交通环境,将网联自动驾驶车与人工驾驶车从空间上分离,发挥网联驾驶车辆高通行效率和高可控性的优势,以提升交叉口的通行效率,应用前景十分广泛。
技术研发人员:蒋贤才,王树,刘存伟
受保护的技术使用者:东北林业大学
技术研发日:
技术公布日:2024/4/22
- 还没有人留言评论。精彩留言会获得点赞!