一种基于空间异质性的细粒度城市交通流推断方法
本发明涉及空间数据挖掘领域,尤其涉及一种基于空间异质性的细粒度城市交通流推断方法。
背景技术:
1、在智能交通系统(its)领域,城市交通流数据是至关重要的,它包含了关于城市中人类运动模式的丰富时空信息。因此,获得细粒度的城市交通流数据对于众多智慧城市应用非常有帮助,例如城市规划和交通管理。通常情况下,细粒度的城市交通流监测需要大量的基础设施,包括分布广泛的传感器和相关的支持设备,比如监控摄像头和电力供应系统。然而,建设和维护城市范围的密集传感器网络需要巨大的经济成本,特别是对于大都市而言。因此,its应用亟需发展一种算法技术可自动从粗粒度城市交通流数据中推导出细粒度城市交通流数据。
2、细粒度城市流推断(fufi)旨在从粗粒度的观测数据中重建细粒度的城市交通流数据。这意味着只需少量分散的监测传感器,然后可以通过算法来还原细粒度的城市交通流量。但是,细粒度城市流推断问题具有一定挑战性。首先,粗粒度和细粒度的城市交通流之间存在复杂的空间相关性。考虑到城市交通流,一个区域的交通流量很大程度上会受到邻近区域的影响。然而,相同粗粒度区域内相邻细粒度分区的交通流分布也可能存在显著差异。其次,不同区域之间的城市交通流呈现出空间异质性,这意味着不同区域的交通流呈现出不同的分布模式。有些区域的交通流呈现出一般的流动模式规律,而其他区域的交通流可能呈现出复杂和不规则的模式特征。
3、目前,细粒度城市交通流推断模型主要集中于利用深度模型来捕获粗粒度和细粒度城市交通流之间复杂的空间相关性。因此,与传统的统计插值方法相比,深度模型对于细粒度城市交通流的推断更加准确。然而,这些模型通常会忽略城市流动的空间异质性,这可能导致在优化过程中,现有方法更倾向于关注易于重构的区域,而对于具有复杂流量分布特征的困难区域则效果不佳。
技术实现思路
1、为了解决现有技术的不足,本发明提供了一种基于空间异质性的细粒度城市交通流推断方法,充分考虑城市地理背景下的空间异质性,能够更有效地进行细粒度城市交通流量推断,引导模型在优化过程中更关注那些具有复杂流动模式的城市区域,进而更好地还原该类型区域的交通流量情况。
2、本发明为解决其技术问题所采用的技术方案是:提供了一种基于空间异质性的细粒度城市交通流推断方法,包括以下步骤:
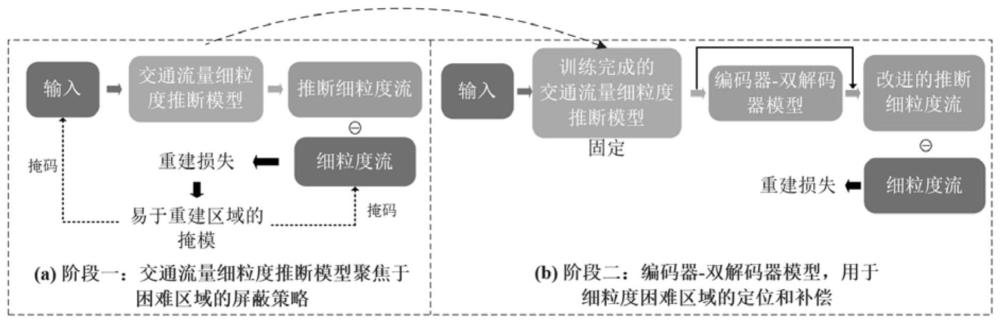
3、s1、构建交通流量细粒度推断模型,将粗粒度城市交通流数据与外部因素提取的特征集成构建的训练输入数据输入交通流量细粒度推断模型,推断出细粒度城市交通流;
4、s2、生成误差映射并进行二值分类,自适应生成掩码,利用掩码对误差低于阈值的区域进行掩码,得到训练完成的交通流量细粒度推断模型;
5、s3、构建编码器-双解码器模型,将训练输入数据依次通过训练完成的交通流量细粒度推断模型和编码器-双解码器模型,完成细粒度城市交通流推断以及细粒度困难区域的定位和补偿。
6、步骤s1所述的交通流量细粒度推断模型由输入端至输出端依次包括第一卷积层、深度残差模块、上采样模块、第二卷积层和校正线性单元激活层。
7、深度残差模块包括一组残差块模块、一个卷积层和一个批归一化层,其中残差块模块采用由两个卷积层、两个批归一化层和一个校正线性单元激活层组成的原始残差结构。
8、上采样模块包括像素重组(pixelshuflle)层。
9、步骤s2所述的掩码处理具体采用以下过程实现:
10、masked fg=fg⊙mask
11、masked input=input⊙avepool(mask,s)
12、其中,masked fg表示掩码后的细粒度城市交通流,fg表示真实的细粒度城市交通流,mask表示生成的掩码,⊙表示哈达玛积(hadamard),masked input表示掩码后的训练输入数据,input表示训练输入数据,avepool()表示平均池化操作,s表示上采样因子。
13、步骤s3所述的编码器-双解码器模型具体包括以下处理过程:
14、s3.1、利用多层下采样过程提取城市交通流量数据的多尺度特征,多层下采样过程采用以下计算:
15、f1=extraction(i-fg)
16、fi+1=extraction(maxpool(fi)),i=1,2,…,n
17、其中extraction()表示特征提取模块操作,maxpool()表示最大池化操作,i-fg表示交通流量细粒度断模型生成的细粒度城市交通流,f1表示底层尺度特征,fi表示第i层尺度特征,n表示除底层以外的下采样层数,最后一层尺度特征即经过多层下采样的多尺度特征;
18、s3.2、将多尺度特征流向双分支,包括一个注意力分支和一个残差特征分支,注意力分支和残差特征分支所输入的多尺度特征分别通过双线性插值过程上采样,然后分别依次与第n尺度特征至第1尺度特征相结合,得到注意力分支特征和残差特征;
19、s3.3、注意力分支特征流向一个卷积层,由sigmoid激活函数生成注意图;
20、s3.4、将注意图与残差特征以哈达玛积形式结合计算残差误差。
21、本发明基于其技术方案所具有的有益效果在于:
22、本发明提供的一种基于空间异质性的细粒度城市交通流推断方法充分考虑城市地理背景下的空间异质性,能够更有效地进行细粒度城市交通流量推断,引导模型在优化过程中更关注那些具有复杂流动模式的城市区域,进而更好地还原该类型区域的交通流量情况。
技术特征:
1.一种基于空间异质性的细粒度城市交通流推断方法,其特征在于包括以下步骤:
2.根据权利要求1所述的基于空间异质性的细粒度城市交通流推断方法,其特征在于:步骤s1所述的交通流量细粒度推断模型由输入端至输出端依次包括第一卷积层、深度残差模块、上采样模块、第二卷积层和校正线性单元激活层。
3.根据权利要求2所述的基于空间异质性的细粒度城市交通流推断方法,其特征在于:深度残差模块包括一组残差块模块、一个卷积层和一个批归一化层,其中残差块模块采用由两个卷积层、两个批归一化层和一个校正线性单元激活层组成的原始残差结构。
4.根据权利要求2所述的基于空间异质性的细粒度城市交通流推断方法,其特征在于:上采样模块包括像素重组层。
5.根据权利要求1所述的基于空间异质性的细粒度城市交通流推断方法,其特征在于:步骤s2所述的掩码处理具体采用以下过程:
6.根据权利要求1所述的基于空间异质性的细粒度城市交通流推断方法,其特征在于:步骤s3所述的编码器-双解码器模型具体包括以下处理过程:
技术总结
本发明提供了一种基于空间异质性的细粒度城市交通流推断方法,首先构建交通流量细粒度推断模型,推断出细粒度城市交通流,接着进行掩码,最后构建编码器‑双解码器模型,将粗粒度城市交通流等数据依次通过训练完成的交通流量细粒度推断模型和编码器‑双解码器模型,完成细粒度城市交通流推断以及细粒度困难区域的定位和补偿。本发明提供的一种基于空间异质性的细粒度城市交通流推断方法,充分考虑城市地理背景下的空间异质性,能够更有效地进行细粒度城市交通流量推断,引导模型在优化过程中更关注那些具有复杂流动模式的城市区域,进而更好地还原该类型区域的交通流量情况。
技术研发人员:禹文豪,贺正庭,张一帆
受保护的技术使用者:中国地质大学(武汉)
技术研发日:
技术公布日:2024/2/6
- 还没有人留言评论。精彩留言会获得点赞!