一种基于车路云协同的自动驾驶线路规划方法、系统及介质与流程
本发明涉及自动驾驶,尤其是涉及一种基于车路云协同的自动驾驶线路规划方法、系统及介质。
背景技术:
1、国内主流自动驾驶车辆多为单车智能加上高精地图实现规定路线的自动驾驶,单车智能无法对整个行驶路径上的路况进行全盘知晓,无法进行线路先择,无法更安全、高效的将车内乘客送达到目的地。
2、通过rsu对各个分支线路上车辆、行人、固定障碍物等进行数据采集,并将数据上传云平台。平台将各个分支路线上的路况进行分析对比,判断那条分支线路更适合自动驾驶车辆高效通行,下发指令给车辆rcu,通过can讯号传给自动驾驶控制器,控制器识别讯号进行路径规划,选择更适合通行的分支线路。
技术实现思路
1、鉴于以上问题,本发明提供了一种基于车路云协同的自动驾驶线路规划方法、系统及介质,不仅解决车智能自动驾驶车辆无法识别前方运营线路的路况,无法做通行线路的最优选择的问题,而且提高了自动驾驶车辆的运行效率。
2、为了实现上述目的及其他相关目的,本发明提供的技术方案如下:
3、一种基于车路云协同的自动驾驶线路规划方法,所述方法包括:
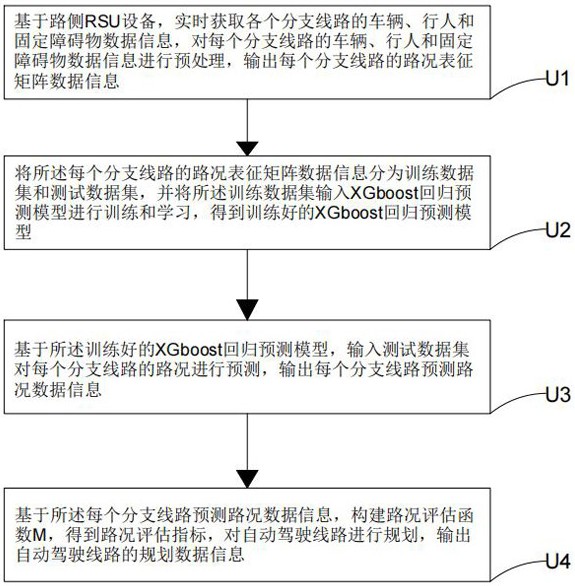
4、u1.基于路侧rsu设备,实时获取各个分支线路的车辆、行人和固定障碍物数据信息,对每个分支线路的车辆、行人和固定障碍物数据信息进行预处理,输出每个分支线路的路况表征矩阵数据信息;
5、u2.将所述每个分支线路的路况表征矩阵数据信息分为训练数据集和测试训练集,并将所述训练数据集输入xgboost回归预测模型进行训练和学习,得到训练好的xgboost回归预测模型;
6、u3.基于所述训练好的xgboost回归预测模型,输入测试训练集对每个分支线路的路况进行预测,输出每个分支线路预测路况数据信息;
7、u4.基于所述每个分支线路预测路况数据信息,构建路况评估函数m,得到路况评估指标,对自动驾驶线路进行规划,输出自动驾驶线路的规划数据信息。
8、进一步的,在步骤u1中,所述对每个分支线路的车辆、行人和固定障碍物数据信息进行预处理包括:
9、u11.获取每个分支线路的车辆、行人和固定障碍物数据信息,并进行数据清洗和数据集成处理,得到处理后的每个分支线路的路况数据信息;
10、u12.基于所述处理后的每个分支线路的路况数据信息,根据车辆、行人和固定障碍物的三个分量构成数组,得到每个分支线路的路况数组数据信息;
11、g13.基于所述每个分支线路的路况数组数据信息,根据时间序列先后顺序合成路况的数组矩阵,输出每个分支线路的路况表征矩阵数据信息。
12、进一步的,在步骤g13中,所述根据时间序列先后顺序合成路况的数组矩阵为建立路况表征数据函数f,
13、
14、其中,λi为权重系数,ati为第i个分支线路t时刻的路况数组,得到每个分支线路的路况表征矩阵数据信息。
15、进一步的,在步骤u2中,所述并将所述训练数据集输入xgboost回归预测模型进行训练和学习包括:
16、u21.基于所述训练数据集,建立xgboost回归预测模型的目标函数g,
17、
18、其中,j为第j个分支线路,f为预测误差函数,ω为复杂度函数,yj为第j个分支线路的路况表征矩阵数据信息,为第j个分支线路的均值路况表征矩阵数据信息,gk为复杂度函数的输入变量;
19、u22.基于所述xgboost回归预测模型的目标函数g,得到预测模型的损失函数obj(θ),
20、
21、其中,yd为第d个分支线路的路况表征矩阵数据信息,为第d个分支线路的均值路况表征矩阵数据信息,r为误差梯度函数,fc为第c个分支线路的预测误差函数,m和v为样本数量;
22、u23.基于所述预测模型的损失函数obj(θ),设置预设阈值,若损失函数obj(θ)小于预设阈值则训练完成,得到训练好的xgboost回归预测模型。
23、进一步的,所述第j个分支线路的均值路况表征矩阵数据信息为,
24、
25、其中,fk为第c个分支线路的预测误差函数,oj为第j个分支线路的路况表征矩阵数据信息。
26、进一步的,所述复杂度函数ω为,
27、
28、其中,γ和η为常量参数,q为权重矩阵,j为样本数量,wj为第j条分支线路的权重比例系数。
29、进一步的,在步骤u4中,所述构建路况评估函数m(q),
30、
31、其中,n为样本总数,ρz为权重系数,q为第q条分支线路的预测路况数据信息,ωz为第z条分支线路的预测路况数据信息。
32、进一步的,设置预设评估指标,若所述路况评估函数m(q)大于预设评估指标,则表示当前分支线路的预测路况不如其他分支线路的预测路况,若所述路况评估函数m(q)小于预设评估指标,则表示当前分支线路的预测路况比其他分支线路的预测路况好。
33、为了实现上述目的及其他相关目的,本发明还提供了一种基于车路云协同的自动驾驶线路规划系统,包括计算机设备,该计算机设备被编程或配置以执行任意一项所述的基于车路云协同的自动驾驶线路规划的方法的步骤。
34、为了实现上述目的及其他相关目的,本发明还提供了一种计算机可读存储介质,该计算机可读存储介质上存储有被编程或配置以执行任意一项所述的基于车路云协同的自动驾驶线路规划方法的计算机程序。
35、本发明具有以下积极效果:
36、1.本发明对每个分支线路的车辆、行人和固定障碍物数据信息进行预处理,并结合训练好的xgboost回归预测模型,对每个分支线路的路况进行预测,不仅能够解决车智能自动驾驶车辆无法识别前方运营线路的路况,无法做通行线路的最优选择的问题,而且提高了自动驾驶车辆的运行效率。
37、2.本发明通过构建路况评估函数,得到路况评估指标,对自动驾驶线路进行规划,进一步保证自动驾驶车辆进入路况好的分支路线进行巡逻或完成任务,提高车辆的工作效率。
技术特征:
1.一种基于车路云协同的自动驾驶线路规划方法,其特征在于,所述方法包括:
2.根据权利要求1所述的基于车路云协同的自动驾驶线路规划方法,其特征在于,在步骤u1中,所述对每个分支线路的车辆、行人和固定障碍物数据信息进行预处理包括:
3.根据权利要求2所述的基于车路云协同的自动驾驶线路规划方法,其特征在于,在步骤g13中,所述根据时间序列先后顺序合成路况的数组矩阵为建立路况表征数据函数f,
4.根据权利要求1所述的基于车路云协同的自动驾驶线路规划方法,其特征在于,在步骤u2中,所述并将所述训练数据集输入xgboost回归预测模型进行训练和学习包括:
5.根据权利要求4所述的基于车路云协同的自动驾驶线路规划方法,其特征在于:所述第j个分支线路的均值路况表征矩阵数据信息为,
6.根据权利要求4所述的基于车路云协同的自动驾驶线路规划方法,其特征在于:所述复杂度函数ω为,
7.根据权利要求1所述的基于车路云协同的自动驾驶线路规划方法,其特征在于,在步骤u4中,所述构建路况评估函数m(q),
8.根据权利要求7所述的基于车路云协同的自动驾驶线路规划方法,其特征在于:设置预设评估指标,若所述路况评估函数m(q)大于预设评估指标,则表示当前分支线路的预测路况不如其他分支线路的预测路况,若所述路况评估函数m(q)小于预设评估指标,则表示当前分支线路的预测路况比其他分支线路的预测路况好。
9.一种基于车路云协同的自动驾驶线路规划系统,包括计算机设备,其特征在于,该计算机设备被编程或配置以执行权利要求1~8中任意一项所述的基于车路云协同的自动驾驶线路规划方法的步骤。
10.一种计算机可读存储介质,其特征在于,该计算机可读存储介质上存储有被编程或配置以执行权利要求1~8中任意一项所述的基于车路云协同的自动驾驶线路规划方法的计算机程序。
技术总结
本发明涉及一种基于车路云协同的自动驾驶线路规划方法、系统及介质,所述方法包括U1.基于路侧RSU设备,实时获取各个分支线路的车辆、行人和固定障碍物数据信息,对每个分支线路的车辆、行人和固定障碍物数据信息进行预处理,输出每个分支线路的路况表征矩阵数据信息;U2.将所述每个分支线路的路况表征矩阵数据信息分为训练数据集和测试训练集,并将所述训练数据集输入XGboost回归预测模型进行训练和学习,得到训练好的XGboost回归预测模型;U3.基于所述训练好的XGboost回归预测模型。本发明不仅解决车智能自动驾驶车辆无法识别前方运营线路的路况,无法做通行线路的最优选择的问题,而且提高了自动驾驶车辆的运行效率。
技术研发人员:杨超,曹恺,王月,黄少文,程星,王甜
受保护的技术使用者:东风悦享科技有限公司
技术研发日:
技术公布日:2024/2/25
- 还没有人留言评论。精彩留言会获得点赞!