一种融合动态数据和静态数据的船舶定位方法与流程
本发明涉及智慧港口领域,尤其涉及一种融合动态数据和静态数据的船舶定位方法。
背景技术:
1、现有港口对船舶进行定位一般是通过船舶安装的定位装置,对船舶的实时轨迹进行摸排整理,在实际应用过程中存在因为定位装置属于多家服务商,数据未能进行集中管理,所以在使用无法合理的整合轨迹数据,容易出现位置错误判断的情况。
技术实现思路
1、为了解决上述问题,本发明的目的在于提供一种融合动态数据和静态数据的船舶定位方法,有效提高船舶进出港规划效率,提高港口运行可靠性。
2、为实现上述目的,本发明采用以下技术方案:
3、一种融合动态数据和静态数据的船舶定位方法,包括以下步骤:
4、岸基雷达扫描港口附近船舶,当跟踪时间超过预设时间,且船舶运动方向是朝向港口方向时,识别为进出港船舶;
5、通过港口的船舶管理系统获取疑似进出港船舶的静态数据;
6、通过gps和监控视频,获取船舶动态数据;
7、基于静态数据和和动态数据,对进出港船舶进行实时定位,并判断是否偏移路线,对偏移路线的船舶进行预警。
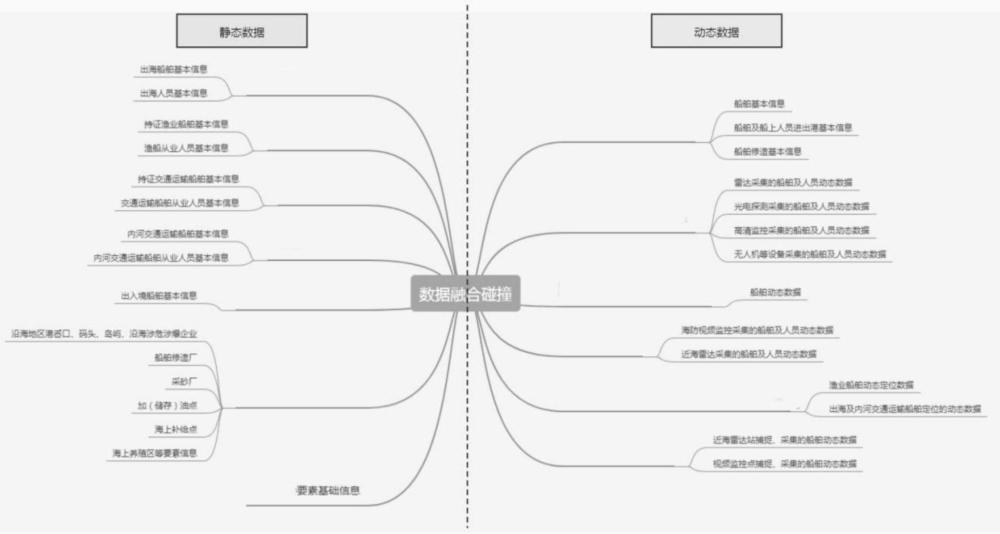
8、进一步的,所述静态数据包括船舶基本信息、人员信息和进出港计划。
9、进一步的,若识别为入港船舶,则进行如下步骤:
10、船舶管理系统获取该船舶的静态数据;
11、通过港口关闸感应获取船舶进入港口的相对位置;
12、船舶管理系统基于该船舶的静态数据、进入港口的相对位置以及港口可停靠位置信息,获取船舶停靠位置,并基于dijkstra算法规划船舶的进港路线;
13、通过港口监控单元实时获取船舶移动图像,并结合船舶的gps数据,获取实际移动轨迹;
14、对实际移动轨迹与进港路线进行匹配,若偏移超过阈值,则发出预警。
15、进一步的,若识别为出港船舶,则进行如下步骤:
16、船舶管理系统获取该船舶的静态数据和停靠位置;
17、船舶管理系统基于该船舶的静态数据、停靠位置以及出港口光栅信息,基于dijkstra算法规划船舶的进港路线;
18、通过港口监控单元实时获取船舶移动图像,并结合船舶的gps数据,获取实际移动轨迹;
19、对实际移动轨迹与出港路线进行匹配,若偏移超过阈值,则发出预警。
20、进一步的,所述获取实际移动轨迹,具体如下:
21、根据港口监控单元实时获取船舶移动图像,并基于目标检测模型和目标跟踪算法,获取连续图像帧中的位置变化;
22、结合船舶的gps数据和目标跟踪结果,通过数据融合算法,估计船舶的实际位置;
23、根据船舶的实际位置使用插值算法重建船舶的实际移动轨迹,得到连续的船舶轨迹。
24、进一步的,所述目标检测模型构建,具体如下:
25、获取包含船舶的图像数据集,并进行标注,包括船舶的位置和边界框;
26、对标记后的图像数据进行预处理,得到训练集;
27、使用深度学习框架构建yolo模型;
28、基于训练集训练yolo模型,使用随机梯度下降优化算法优化模型的参数,得到训练好的yolo模型,作为目标检测模型。
29、进一步的,所述基于训练集训练yolo模型,使用随机梯度下降优化算法优化模型的参数,具体如下:
30、将训练集数据输入模型,通过网络的前向计算,得到模型的输出;
31、将模型的输出与标签进行比较,计算损失函数来衡量模型的预测与真实值之间的差异;
32、根据损失函数,通过反向传播算法计算每个参数对损失的梯度;
33、使用梯度下降算法更新模型的参数,以减小损失函数的值;
34、θ = θ - learning_rate * gradient
35、其中,θ表示模型的参数,learning_rate是学习率,gradient是参数的梯度
36、进一步的,所述损失函数采用yolo损失函数,包括定位损失、分类损失和目标置信度损失。
37、进一步的,所述目标跟踪算法,具体如下:
38、设目标检测模型输出的输出船舶位置的边界框,表示为 (x, y, w, h),其中 (x,y) 是边界框的左上角坐标,w 和 h 是边界框的宽度和高度;
39、根据船舶的初始位置 (x0, y0) 和运动模型,使用卡尔曼滤波算法来估计船舶在当前帧的位置 (xt, yt),表示为:
40、xt = a * xt-1 + b * ut + w
41、yt = c * xt + d * ut + v
42、其中,a、b、c、d 是状态转移矩阵和控制矩阵,ut 是控制输入,w 和 v 是过程噪声和观测噪声。
43、进一步的,所述插值算法,具体如下:
44、 (1) 根据船舶的实际位置,将连续的时间间隔划分为若干个时间点,这些时间点即为插值点;
45、(2)对于每个插值点,找到其前后两个已知位置估计结果的时间点,确定插值区间;
46、(3)对于每个插值区间,使用线性插值公式计算插值点的位置,设插值区间为[t1, t2],已知位置估计结果为 p1 和 p2,要计算的插值点为 pt,其位置可以通过以下公式计算:
47、pt = p1 + (pt - t1) * (p2 - p1) / (t2 - t1)
48、其中,pt 表示插值点的位置,p1 和 p2 分别表示插值区间的两个已知位置估计结果,t1 和 t2 分别表示插值区间的时间点;
49、(4)重复步骤(3),对于每个插值区间都进行插值计算,直到得到所有插值点的位置
50、(5)将所有插值点的位置按照时间顺序连接起来,得到连续的船舶轨迹。
51、本发明具有如下有益效果:
52、本发明融合过光闸、雷达、视频、无人机等方式采集船舶动态数据与记录的静态船舶管理数据,对船舶进行定位,并对进出港轨迹进行规划,有效提高港口通行效率。
技术特征:
1.一种融合动态数据和静态数据的船舶定位方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的融合动态数据和静态数据的船舶定位方法,其特征在于,所述静态数据包括船舶基本信息、人员信息和进出港计划。
3.根据权利要求2所述的融合动态数据和静态数据的船舶定位方法,其特征在于,若识别为入港船舶,则进行如下步骤:
4.根据权利要求2所述的融合动态数据和静态数据的船舶定位方法,其特征在于,若识别为出港船舶,则进行如下步骤:
5.根据权利要求3或4所述的融合动态数据和静态数据的船舶定位方法,其特征在于,所述获取实际移动轨迹,具体如下:
6.根据权利要求5所述的融合动态数据和静态数据的船舶定位方法,其特征在于,所述目标检测模型构建,具体如下:
7.根据权利要求6所述的融合动态数据和静态数据的船舶定位方法,其特征在于,所述基于训练集训练yolo模型,使用随机梯度下降优化算法优化模型的参数,具体如下:
8.根据权利要求7所述的融合动态数据和静态数据的船舶定位方法,其特征在于,所述损失函数采用yolo损失函数,包括定位损失、分类损失和目标置信度损失。
9.根据权利要求5所述的融合动态数据和静态数据的船舶定位方法,其特征在于,所述目标跟踪算法,具体如下:
10.根据权利要求5所述的融合动态数据和静态数据的船舶定位方法,其特征在于,所述插值算法,具体如下:
技术总结
本发明涉及一种融合动态数据和静态数据的船舶定位方法,包括以下步骤:岸基雷达扫描港口附近船舶,当跟踪时间超过预设时间,且船舶运动方向是朝向港口方向时,识别为进出港船舶;通过港口的船舶管理系统获取疑似进出港船舶的静态数据;通过GPS和监控视频,获取船舶动态数据;基于静态数据和和动态数据,对进出港船舶进行实时定位,并判断是否偏移路线,对偏移路线的船舶进行预警。本发明有效提高船舶进出港规划效率,提高港口运行可靠性。
技术研发人员:孙义俊
受保护的技术使用者:福建天创信息科技有限公司
技术研发日:
技术公布日:2024/3/4
- 还没有人留言评论。精彩留言会获得点赞!