一种停车位检测方法、装置、存储介质及电子设备与流程
本发明涉及信息,具体而言,涉及一种停车位检测方法、装置、存储介质及电子设备。
背景技术:
1、停车场车位指引装置采用的技术包括传感技术、数据通信和数据处理,除此之外,还包括led/lcd显示屏、移动应用程序、语音提示和云端集成,这些技术的发展使得停车场管理更加高效,车主能够更轻松地找到可用车位。
2、目前,在进行停车场空闲车位检测时,通常采用单一的传感器进行检测。然而,这种检测方式会受限于单一传感器的检测范围,或者障碍物的遮挡,难以精准识别空闲停车位。
技术实现思路
1、本发明提供一种停车位检测方法、装置、存储介质及电子设备,主要在于能够提高空闲停车位的检测精度。
2、根据本发明实施例的第一方面,提供一种停车位检测方法,应用于边缘计算设备,包括:
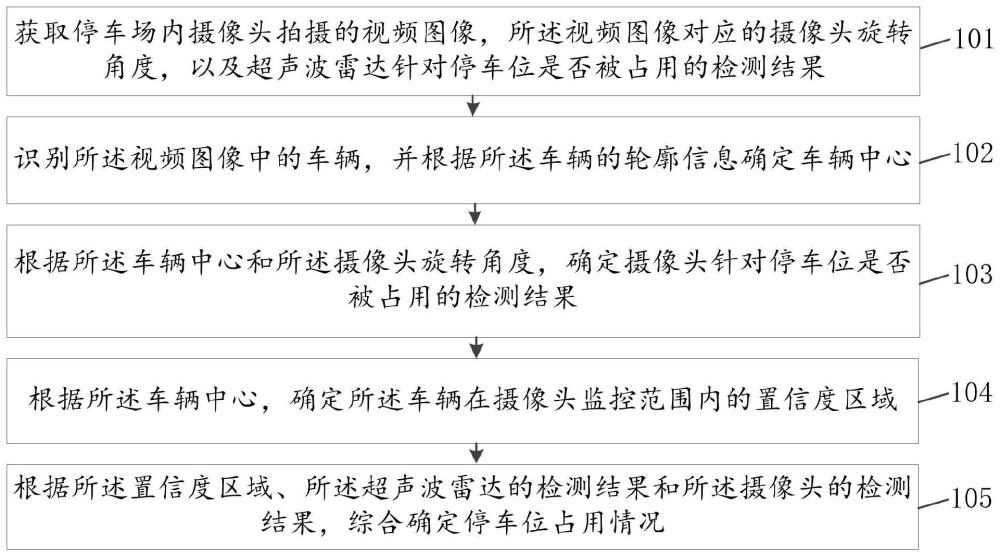
3、获取停车场内摄像头拍摄的视频图像,所述视频图像对应的摄像头旋转角度,以及超声波雷达针对停车位是否被占用的检测结果;
4、识别所述视频图像中的车辆,并根据所述车辆的轮廓信息确定车辆中心;
5、根据所述车辆中心和所述摄像头旋转角度,确定摄像头针对停车位是否被占用的检测结果;
6、根据所述车辆中心,确定所述车辆在摄像头监控范围内的置信度区域;
7、根据所述置信度区域、所述超声波雷达的检测结果和所述摄像头的检测结果,综合确定停车位占用情况。
8、根据本发明实施例的第二方面,提供一种停车位检测装置,包括:
9、获取单元,用于获取停车场内摄像头拍摄的视频图像,所述视频图像对应的摄像头旋转角度,以及超声波雷达针对停车位是否被占用的检测结果;
10、识别单元,用于识别所述视频图像中的车辆,并根据所述车辆的轮廓信息确定车辆中心;
11、第一确定单元,用于根据所述车辆中心和所述摄像头旋转角度,确定摄像头针对停车位是否被占用的检测结果;
12、第二确定单元,用于根据所述车辆中心,确定所述车辆在摄像头监控范围内的置信度区域;
13、第三确定单元,用于根据所述置信度区域、所述超声波雷达的检测结果和所述摄像头的检测结果,综合确定停车位占用情况。
14、根据本发明实施例的第三方面,提供一种计算机可读存储介质,其上存储有计算机程序,该程序被处理器执行时实现以下步骤:
15、获取停车场内摄像头拍摄的视频图像,所述视频图像对应的摄像头旋转角度,以及超声波雷达针对停车位是否被占用的检测结果;
16、识别所述视频图像中的车辆,并根据所述车辆的轮廓信息确定车辆中心;
17、根据所述车辆中心和所述摄像头旋转角度,确定摄像头针对停车位是否被占用的检测结果;
18、根据所述车辆中心,确定所述车辆在摄像头监控范围内的置信度区域;
19、根据所述置信度区域、所述超声波雷达的检测结果和所述摄像头的检测结果,综合确定停车位占用情况。
20、根据本发明实施例的第四方面,提供一种电子设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述程序时实现以下步骤:
21、获取停车场内摄像头拍摄的视频图像,所述视频图像对应的摄像头旋转角度,以及超声波雷达针对停车位是否被占用的检测结果;
22、识别所述视频图像中的车辆,并根据所述车辆的轮廓信息确定车辆中心;
23、根据所述车辆中心和所述摄像头旋转角度,确定摄像头针对停车位是否被占用的检测结果;
24、根据所述车辆中心,确定所述车辆在摄像头监控范围内的置信度区域;
25、根据所述置信度区域、所述超声波雷达的检测结果和所述摄像头的检测结果,综合确定停车位占用情况。
26、本发明的创新点,如下:
27、1、本发明通过在停车场内布置监控摄像头和超声波雷达,能够根据摄像头的检测结果和超声波雷达的检测结果,综合判定停车位被占用的情况,从而能够克服单一传感器检测结果异常的问题,提高空闲停车位的检测精度。
28、2、本发明减少了摄像头的使用数量,从而能够降低停车场的设备部署成本。
29、3、本发明优化了车位指引逻辑,在各区域分别安装引导设备,当有车辆行驶在该区域时引导设备才闪烁,从而使引导信息更加清晰且具有针对性。
30、4、本发明采用分布式计算架构,在停车场的各区域内布置成本较低的嵌入式计算单元,各区域内的嵌入式计算单元负责本区域内的传感器数据处理,设备之间通信传输处理结果,由此只需要在小范围区域内将线束连接至嵌入式计算设备即可,从而能够降低服务器和线束布置成本。
31、本发明提供的一种停车位检测方法、装置、存储介质及电子设备,与现有技术相比,能够获取停车场内摄像头拍摄的视频图像,所述视频图像对应的摄像头旋转角度,以及超声波雷达针对停车位是否被占用的检测结果,之后识别所述视频图像中的车辆,并根据所述车辆的轮廓信息确定车辆中心,接着根据所述车辆中心和所述摄像头旋转角度,确定摄像头针对停车位是否被占用的检测结果,与此同时,根据所述车辆中心,确定所述车辆在摄像头监控范围内的置信度区域,最终根据所述置信度区域、所述超声波雷达的检测结果和所述摄像头的检测结果,综合确定停车位占用情况。由此可知,本发明通过在停车场内布置监控摄像头和超声波雷达,能够根据摄像头的检测结果和超声波雷达的检测结果,综合判定停车位被占用的情况,从而能够克服单一传感器检测结果异常的问题,提高空闲停车位的检测精度,与此同时,本发明还能够减少摄像头的使用数量,降低停车场的设备部署成本。进一步地,本发明采用分布式计算架构,在停车场的各区域内布置成本较低的嵌入式计算单元,只需要在小范围区域内将线束连接至嵌入式计算设备即可,从而能够降低服务器和线束布置成本。
32、上述说明仅是本申请技术方案的概述,为了能够更清楚了解本申请的技术手段,而可依照说明书的内容予以实施,并且为了让本申请的上述和其它目的、特征和优点能够更明显易懂,以下特举本申请的具体实施方式。
技术特征:
1.一种停车位检测方法,其特征在于,应用于边缘计算设备,包括:
2.根据权利要求1所述的方法,其特征在于,所述识别所述视频图像中的车辆,包括:
3.根据权利要求2所述的方法,其特征在于,所述根据所述车辆中心和所述旋转状态位信息,确定所述摄像头针对停车位是否被占用的检测结果,包括:
4.根据权利要求1所述的方法,其特征在于,所述根据所述车辆中心,确定所述车辆在所述摄像头的监控范围内所处的置信度区域,包括:
5.根据权利要求4所述的方法,其特征在于,所述预估所述低置信度区域内车辆数量与停车位数量的配比情况,包括:
6.根据权利要求1-5任一项所述的方法,其特征在于,所述方法还包括:
7.根据权利要求6所述的方法,其特征在于,所述根据所述引导路径,向相应的引导设备下发引导指令,包括:
8.一种停车位检测装置,其特征在于,包括:
9.一种计算机可读存储介质,其上存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现权利要求1至7中任一项所述的方法的步骤。
10.一种电子设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,其特征在于,所述计算机程序被处理器执行时实现权利要求1至7中任一项所述的方法的步骤。
技术总结
本发明公开了一种停车位检测方法、装置、存储介质及电子设备,本发明涉及信息技术领域,其中包括:获取停车场内摄像头拍摄的视频图像,所述视频图像对应的摄像头旋转角度,以及超声波雷达针对停车位是否被占用的检测结果;识别所述视频图像中的车辆,并根据所述车辆的轮廓信息确定车辆中心;根据所述车辆中心和所述摄像头旋转角度,确定摄像头针对停车位是否被占用的检测结果;根据所述车辆中心,确定所述车辆在摄像头监控范围内的置信度区域;根据所述置信度区域、所述超声波雷达的检测结果和所述摄像头的检测结果,综合确定停车位占用情况。本发明能够空闲停车位的检测精度。
技术研发人员:褚文博,肖秧,方达龙,刘虹葳,孔德聪
受保护的技术使用者:西部科学城智能网联汽车创新中心(重庆)有限公司
技术研发日:
技术公布日:2024/3/11
- 还没有人留言评论。精彩留言会获得点赞!