车辆超速识别方法、装置、设备及存储介质与流程
本发明涉及智能设备,尤其涉及车辆超速识别方法、装置、设备及存储介质。
背景技术:
1、随着车辆数量的不断增加,使得交通管理工作愈加繁重,为了便于管理,越来越多的交通路口都已经配备上摄像头,用于识别车辆的超速行为,但摄像头的监控存在至少两方面的弊端,第一,摄像头监控存在技术限制,例如,图像质量不稳定、夜间拍摄效果不佳,第二,摄像头的安装和维护成本较高,且还需要定期维护和维修,用于监控的摄像头必须具备高清晰度、广角、夜视等功能,而功能的增多无疑会提高识别成本,因此,上述方式识别车辆超速的准确性较低且成本较高。
2、上述内容仅用于辅助理解本发明的技术方案,并不代表承认上述内容是现有技术。
技术实现思路
1、本发明的主要目的在于提供一种车辆超速识别方法、装置、设备及存储介质,旨在解决现有技术识别车辆超速的准确性较低且成本较高的技术问题。
2、为实现上述目的,本发明提供了一种车辆超速识别方法,所述车辆超速识别方法包括以下步骤:
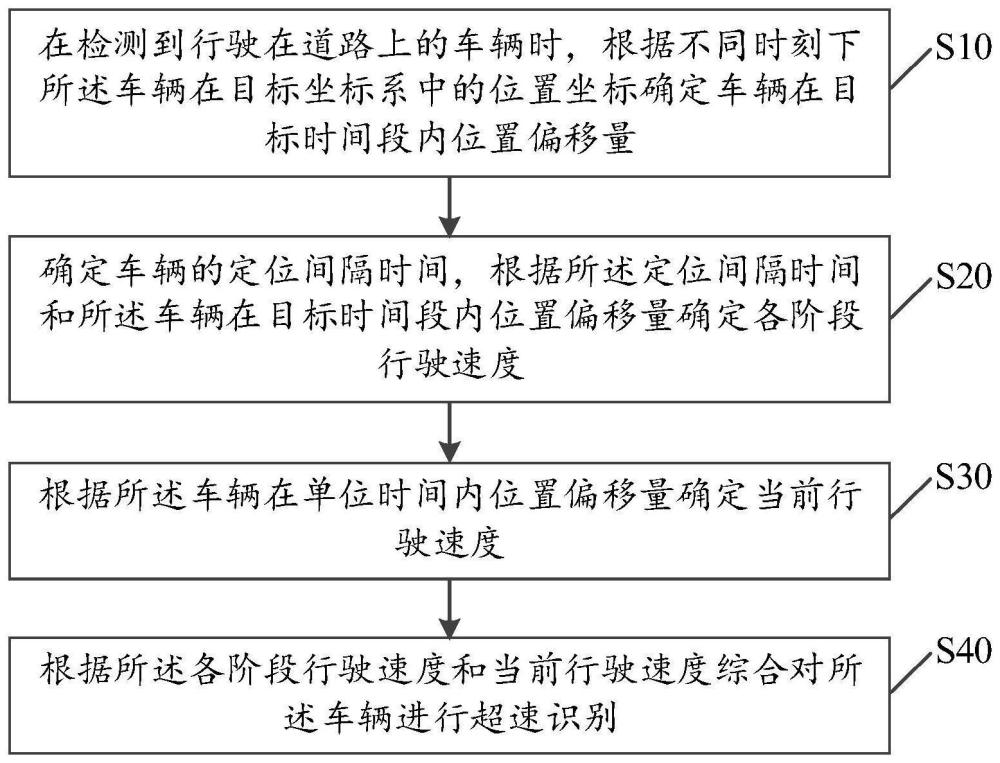
3、在检测到行驶在道路上的车辆时,根据不同时刻下所述车辆在目标坐标系中的位置坐标确定车辆在目标时间段内位置偏移量;
4、确定车辆的定位间隔时间,根据所述定位间隔时间和所述车辆在目标时间段内位置偏移量确定各阶段行驶速度;
5、根据所述车辆在目标时间段内位置偏移量确定当前行驶速度;
6、根据所述各阶段行驶速度和当前行驶速度综合对所述车辆进行超速识别。
7、可选地,所述在检测到行驶在道路上的车辆时,根据不同时刻下所述车辆在目标坐标系中的位置坐标确定车辆在目标时间段内位置偏移量,包括:
8、在检测到行驶在道路上的车辆时,通过目标定位模型在不同时刻对所述车辆进行定位,得到所述车辆在目标坐标系中的各位置坐标;
9、根据所述车辆在目标坐标系中的各位置坐标得到车辆在开始时刻的位置坐标和结束时刻的位置坐标;
10、根据所述车辆在开始时刻的位置坐标和结束时刻的位置坐标计算当前位置偏移量;
11、根据所述开始时刻和结束时刻计算目标时间段;
12、根据所述当前位置偏移量和所述目标时间段计算车辆在目标时间段内位置偏移量。
13、可选地,所述根据所述定位间隔时间和所述车辆在目标时间段内位置偏移量确定各阶段行驶速度,包括:
14、根据所述定位间隔时间对所述车辆在目标时间内位置偏移量进行分段,得到各间隔时间段内位置偏移量;
15、根据所述各间隔时间段内位置偏移量计算各阶段行驶速度。
16、可选地,所述根据所述各阶段行驶速度和当前行驶速度综合对所述车辆进行超速识别,包括:
17、获取所述车辆行驶道路的道路类型;
18、根据所述车辆在目标坐标系中的各位置坐标、道路边界的坐标以及各车道的宽度确定行驶车道;
19、根据所述道路类型、所述行驶车道以及车辆型号综合确定目标限制速度;
20、根据所述当前行驶速度、所述目标限制速度以及各阶段行驶速度综合对所述车辆进行超速识别。
21、可选地,所述根据所述当前行驶速度、所述目标限制速度以及各阶段行驶速度综合对所述车辆进行超速识别之后,还包括:
22、在所述当前行驶速度大于目标限制速度时,将所述各阶段行驶速度分别与所述目标限制速度进行比较;
23、在比较结果为存在任一阶段行驶速度大于目标限制速度时,获取所述车辆的当前图像;
24、根据所述当前图像得到所述车辆的标识信息;
25、对所述当前图像的目标通道的数值进行增加,得到目标图像;
26、将所述目标图像进行展示,以及将所述标识信息和目标图像上传至交通管理部门管控的云端。
27、可选地,所述根据所述当前图像得到所述车辆的标识信息,包括:
28、通过能见度检测算法对当前行驶场景下的区域进行能见度检测,得到能见度检测图像像素值;
29、在所述能见度检测图像像素值小于预设像素值阈值时,对所述当前图像进行去模糊处理;
30、对模糊处理后的当前图像进行裁剪,得到目标区域图像;
31、对所述目标区域图像进行识别,得到各标识信息;
32、通过全连接层的分类网络对所述各标识信息进行分类;
33、根据标识信息分类结果确定所述车辆的标识信息。
34、可选地,所述将所述目标图像进行展示,以及将所述标识信息和目标图像上传至交通管理部门管控的云端之后,还包括:
35、在接收到所述交通管理部门管控的云端反馈的上传成功信息时,将所述标识信息和目标图像从本地存储区域删除。
36、此外,为实现上述目的,本发明还提出一种车辆超速识别装置,所述车辆超速识别装置包括:
37、偏移量确定模块,用于在检测到行驶在道路上的车辆时,根据不同时刻下所述车辆在目标坐标系中的位置坐标确定车辆在目标时间段内位置偏移量;
38、行驶速度确定模块,用于确定车辆的定位间隔时间,根据所述定位间隔时间和所述车辆在目标时间段内位置偏移量确定各阶段行驶速度;
39、所述行驶速度确定模块,还用于根据所述车辆在目标时间段内位置偏移量确定当前行驶速度;
40、识别模块,用于根据所述各阶段行驶速度和当前行驶速度综合对所述车辆进行超速识别。
41、此外,为实现上述目的,本发明还提出一种车辆超速识别设备,所述车辆超速识别设备包括:存储器、处理器及存储在所述存储器上并可在所述处理器上运行的车辆超速识别程序,所述车辆超速识别程序配置为实现如上文所述的车辆超速识别方法。
42、此外,为实现上述目的,本发明还提出一种存储介质,所述存储介质上存储有车辆超速识别程序,所述车辆超速识别程序被处理器执行时实现如上文所述的车辆超速识别方法。
43、本发明提出的车辆超速识别方法,通过在检测到行驶在道路上的车辆时,根据不同时刻下所述车辆在目标坐标系中的位置坐标确定车辆在目标时间段内位置偏移量;确定车辆的定位间隔时间,根据所述定位间隔时间和所述车辆在目标时间段内位置偏移量确定各阶段行驶速度;根据所述车辆在目标时间段内位置偏移量确定当前行驶速度;根据所述各阶段行驶速度和当前行驶速度综合对所述车辆进行超速识别;通过上述方式,根据不同时刻下车辆在目标坐标系中的位置坐标确定车辆在目标时间段内位置偏移量,然后结合定位间隔时间确定各阶段行驶速度,根据车辆在目标时间段内位置偏移量确定当前行驶速度,再结合目标限制速度综合对车辆进行超速识别,从而能够有效提高识别车辆超速的准确性,以及降低识别成本。
技术特征:
1.一种车辆超速识别方法,其特征在于,所述车辆超速识别方法包括以下步骤:
2.如权利要求1所述的车辆超速识别方法,其特征在于,所述在检测到行驶在道路上的车辆时,根据不同时刻下所述车辆在目标坐标系中的位置坐标确定车辆在目标时间段内位置偏移量,包括:
3.如权利要求1所述的车辆超速识别方法,其特征在于,所述根据所述定位间隔时间和所述车辆在目标时间段内位置偏移量确定各阶段行驶速度,包括:
4.如权利要求1所述的车辆超速识别方法,其特征在于,所述根据所述各阶段行驶速度和当前行驶速度综合对所述车辆进行超速识别,包括:
5.如权利要求4所述的车辆超速识别方法,其特征在于,所述根据所述当前行驶速度、所述目标限制速度以及各阶段行驶速度综合对所述车辆进行超速识别之后,还包括:
6.如权利要求5所述的车辆超速识别方法,其特征在于,所述根据所述当前图像得到所述车辆的标识信息,包括:
7.如权利要求5所述的车辆超速识别方法,其特征在于,所述将所述目标图像进行展示,以及将所述标识信息和目标图像上传至交通管理部门管控的云端之后,还包括:
8.一种车辆超速识别装置,其特征在于,所述车辆超速识别装置包括:
9.一种车辆超速识别设备,其特征在于,所述车辆超速识别设备包括:存储器、处理器及存储在所述存储器上并可在所述处理器上运行的车辆超速识别程序,所述车辆超速识别程序配置有实现如权利要求1至7中任一项所述的车辆超速识别方法。
10.一种存储介质,其特征在于,所述存储介质上存储有车辆超速识别程序,所述车辆超速识别程序被处理器执行时实现如权利要求1至7中任一项所述的车辆超速识别方法。
技术总结
本发明公开了一种车辆超速识别方法、装置、设备及存储介质,该方法包括:在检测到行驶在道路上的车辆时,根据不同时刻下车辆在目标坐标系中的位置坐标确定车辆在目标时间段内位置偏移量;确定车辆的定位间隔时间,根据定位间隔时间和车辆在目标时间段内位置偏移量确定各阶段行驶速度;根据车辆在目标时间段内位置偏移量确定当前行驶速度;根据各阶段行驶速度和当前行驶速度综合对车辆进行超速识别;通过上述方式,根据不同时刻下的位置坐标确定车辆在目标时间段内位置偏移量,确定当前行驶速度,以及结合定位间隔时间确定各阶段行驶速度,再结合目标限制速度综合对车辆进行超速识别,从而能够有效提高识别车辆超速的准确性,以及降低识别成本。
技术研发人员:薛鹏
受保护的技术使用者:歌尔科技有限公司
技术研发日:
技术公布日:2024/4/17
- 还没有人留言评论。精彩留言会获得点赞!