非机动车抢黄灯行为检测方法、装置、计算机设备和介质与流程
本申请涉及交通感知,特别是涉及一种非机动车抢黄灯行为检测方法、装置、计算机设备和介质。
背景技术:
1、非机动车抢黄灯行为是指在交通信号灯变为黄灯时,非机动车仍然越线通过交叉路口,而没有按照交通规则停车等待。非机动车由于其行驶速度的限制,通常不能在黄灯结束前就通过交叉路口,可能会导致交通事故的发生。
2、相关技术中,主要是通过摄像头等设备采集路口交通数据,预测机动车的行驶行为,而对于非机动车的行为检测尚无较为有效的方法。
技术实现思路
1、基于此,有必要针对上述技术问题,提供一种能够准确检测非机动车抢黄灯行为的非机动车抢黄灯行为检测方法、装置、计算机设备、计算机可读存储介质和计算机程序产品。
2、第一方面,本申请提供了一种非机动车抢黄灯行为检测方法,包括:
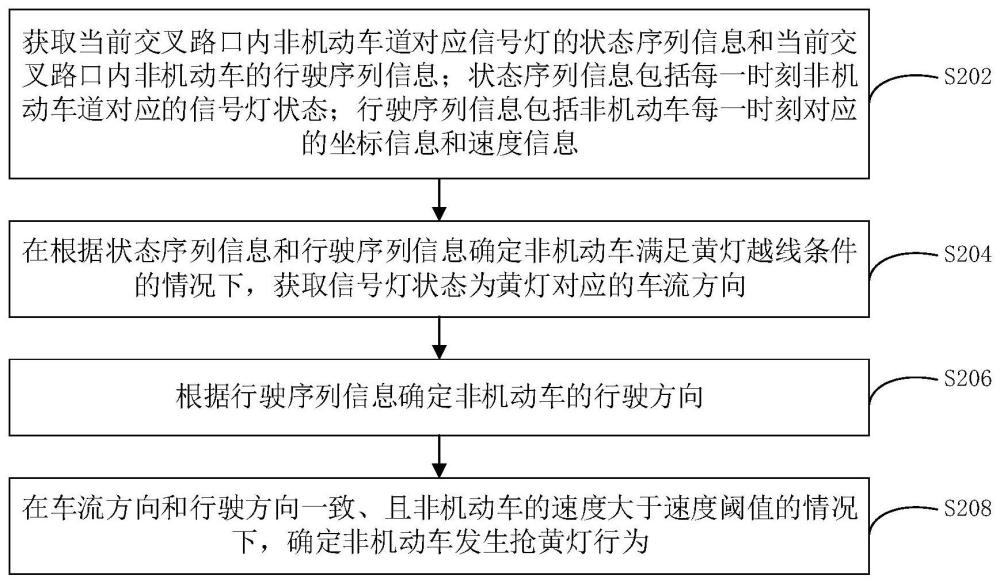
3、获取当前交叉路口内非机动车道对应信号灯的状态序列信息和当前交叉路口内非机动车的行驶序列信息;状态序列信息包括每一时刻非机动车道对应的信号灯状态;行驶序列信息包括非机动车每一时刻对应的坐标信息和速度信息;
4、在根据状态序列信息和行驶序列信息确定非机动车满足黄灯越线条件的情况下,获取信号灯状态为黄灯对应的车流方向;
5、根据行驶序列信息确定非机动车的行驶方向;
6、在车流方向和行驶方向一致、且非机动车的速度大于速度阈值的情况下,确定非机动车发生抢黄灯行为。
7、在其中一个实施例中,获取当前交叉路口内非机动车道对应信号灯的状态序列信息和当前交叉路口内非机动车的行驶序列信息的步骤,包括:
8、获取每一时刻当前交叉路口内进口方向的非机动车道对应的信号灯状态,得到状态序列信息;
9、通过路侧传感器采集当前交叉路口内非机动车的经纬度信息和速度信息;
10、对经纬度信息进行坐标系转换,得到坐标信息;
11、对坐标信息和速度信息进行融合,得到行驶序列信息。
12、在其中一个实施例中,根据信号灯状态序列信息和行驶序列信息确定非机动车满足黄灯越线条件的步骤,包括:
13、根据坐标信息获取非机动车的车头坐标和车尾坐标;
14、获取当前交叉路口对应的地图信息;地图信息包括路口中心区域;
15、在非机动车所处的非机动车道对应的信号灯状态为黄灯、且车头坐标和车尾坐标不处于路口中心区域对应的范围内的情况下,确定非机动车满足越线起始条件,根据状态序列信息获取当前信号灯状态为黄灯对应的第一方向;
16、在非机动车所处的非机动车道对应的信号灯状态为黄灯、且车头坐标或车尾坐标处于路口中心区域对应的范围内的情况下,确定非机动车满足越线行驶条件,根据状态序列信息获取当前信号灯状态为黄灯对应的第二方向;
17、在非机动车满足越线起始条件和越线行驶条件、且第一方向和第二方向一致的情况下,确定非机动车满足黄灯越线条件。
18、在其中一个实施例中,获取信号灯状态为黄灯对应的车流方向的步骤,包括:
19、在根据状态序列信息和行驶序列信息确定非机动车满足黄灯越线条件的情况下,将第一方向或第二方向作为信号灯状态为黄灯对应的车流方向。
20、在其中一个实施例中,地图信息还包括当前交叉路口内各车道对应的车道停止线;根据行驶序列信息确定非机动车的行驶方向的步骤,包括:
21、根据坐标信息获取非机动车的中心点坐标;
22、在中心点坐标与非机动车所处的非机动车道对应的车道停止线中点坐标间的第一距离大于距离阈值的情况下,针对非机动车道左侧同进口方向的机动车道以及右转出口方向的非机动车道,获取中心点坐标与左侧同进口方向的机动车道对应的车道停止线中点坐标间的第二距离、以及中心点坐标与右转出口方向的非机动车道对应的车道停止线中点坐标间的第三距离;
23、根据第一距离、第二距离、以及第三距离,确定非机动车的行驶方向。
24、在其中一个实施例中,根据第一距离、第二距离、以及第三距离,确定非机动车的行驶方向的步骤,包括:
25、在第二距离小于第一距离的情况下,确定非机动车的行驶方向为左转;
26、在第三距离小于第一距离、且第一距离小于第二距离的情况下,确定非机动车的行驶方向为右转;
27、在第一距离小于第三距离、且第三距离小于第二距离的情况下,确定非机动车的行驶方向为直行。
28、在其中一个实施例中,该方法还包括:
29、在当前交叉路口不存在非机动车道对应的信号灯的情况下,将与非机动车所处的非机动车道相同进口方向的机动车道对应的状态序列信息,作为当前交叉路口内非机动车道对应的状态序列信息。
30、第二方面,本申请还提供了一种非机动车抢黄灯行为检测装置,包括:
31、状态获取模块,用于获取当前交叉路口内非机动车道对应信号灯的状态序列信息和当前交叉路口内非机动车的行驶序列信息;状态序列信息包括每一时刻非机动车道对应的信号灯状态;行驶序列信息包括非机动车每一时刻对应的坐标信息和速度信息;
32、车流获取模块,用于在根据状态序列信息和行驶序列信息确定非机动车满足黄灯越线条件的情况下,获取信号灯状态为黄灯对应的车流方向;
33、方向确定模块,用于根据行驶序列信息确定非机动车的行驶方向;
34、抢黄灯检测模块,用于在车流方向和行驶方向一致、且非机动车的速度大于速度阈值的情况下,确定非机动车发生抢黄灯行为。
35、第三方面,本申请还提供了一种计算机设备,包括存储器和处理器,存储器存储有计算机程序,处理器执行计算机程序时实现第一方面中任意一项的方法步骤。
36、第四方面,本申请还提供了一种计算机可读存储介质,其上存储有计算机程序,计算机程序被处理器执行时实现第一方面中任意一项的方法步骤。
37、第五方面,本申请还提供了一种计算机程序产品,包括计算机程序,该计算机程序被处理器执行时实现第一方面中任意一项的方法步骤。
38、上述非机动车抢黄灯行为检测方法、装置、计算机设备、存储介质和计算机程序产品,通过获取当前交叉路口内非机动车道对应信号灯的状态序列信息和当前交叉路口内非机动车的行驶序列信息,在根据状态序列信息和行驶序列信息确定非机动车满足黄灯越线条件的情况下,获取信号灯状态为黄灯对应的车流方向,根据行驶序列信息确定非机动车的行驶方向,在车流方向和行驶方向一致、且非机动车的速度大于速度阈值的情况下,确定非机动车发生抢黄灯行为,能够准确检测非机动车抢黄灯行为,提高智能交通管理能力。
技术特征:
1.一种非机动车抢黄灯行为检测方法,其特征在于,所述方法包括:
2.根据权利要求1所述的方法,其特征在于,所述获取当前交叉路口内非机动车道对应信号灯的状态序列信息和当前交叉路口内非机动车的行驶序列信息,包括:
3.根据权利要求2所述的方法,其特征在于,所述根据所述信号灯状态序列信息和所述行驶序列信息确定所述非机动车满足黄灯越线条件的步骤,包括:
4.根据权利要求3所述的方法,其特征在于,所述获取所述信号灯状态为黄灯对应的车流方向,包括:
5.根据权利要求3所述的方法,其特征在于,所述地图信息还包括当前交叉路口内各车道对应的车道停止线;所述根据所述行驶序列信息确定所述非机动车的行驶方向,包括:
6.根据权利要求5所述的方法,其特征在于,所述根据所述第一距离、所述第二距离、以及所述第三距离,确定所述非机动车的行驶方向,包括:
7.根据权利要求1所述的方法,其特征在于,所述方法还包括:
8.一种非机动车抢黄灯行为检测装置,其特征在于,所述装置包括:
9.一种计算机设备,包括存储器和处理器,所述存储器存储有计算机程序,其特征在于,所述处理器执行所述计算机程序时实现权利要求1至7中任一项所述的方法的步骤。
10.一种计算机可读存储介质,其上存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现权利要求1至7中任一项所述的方法的步骤。
技术总结
本申请涉及一种非机动车抢黄灯行为检测方法、装置、计算机设备和存储介质,通过获取当前交叉路口内非机动车道对应信号灯的状态序列信息和当前交叉路口内非机动车的行驶序列信息,在根据状态序列信息和行驶序列信息确定非机动车满足黄灯越线条件的情况下,获取信号灯状态为黄灯对应的车流方向,根据行驶序列信息确定非机动车的行驶方向,在车流方向和行驶方向一致、且非机动车的速度大于速度阈值的情况下,确定非机动车发生抢黄灯行为,能够准确检测非机动车抢黄灯行为,提高智能交通管理能力。
技术研发人员:刘毅,杨唐涛,胡汇泽,王邓江
受保护的技术使用者:苏州万集车联网技术有限公司
技术研发日:
技术公布日:2024/4/24
- 还没有人留言评论。精彩留言会获得点赞!