基于动态常微分图神经网络的交通流量预测方法及装置
本发明涉及智能交通系统领域,具体涉及基于动态常微分图神经网络的交通流量预测方法及装置。
背景技术:
1、随着交通路网中交通数据的爆炸式增长,交通管理系统面临着巨大压力。智能交通系统(its)的发展对于城市交通的有效控制和规划有着重大意义,而交通流量预测是智能交通系统的重要组成部分之一,可以为城市交通控制和规划提供科学依据。因此,准确的交通流量预测备受人们关注。
2、城市路网节点往往呈现出高度动态和复杂的时空依赖关系,近年来,深度学习中基于序列预测的递归神经网络(rnn)可以有效捕捉交通流数据的时间依赖性,成为解决序列预测问题的热门方法。同时,由于图神经网络(gnn)强大的网格结构和非欧几里得数据处理能力,研究人员引入gnn代替卷积神经网络(cnn)来抽取交通路网中的空间特征。
3、然而gnn被证明存在节点数据相似(over-smoothing)问题,层数越深,其表征能力越差,因此当层数增加时各节点的数据容易收敛到相同的值,此问题严重限制了时空预测模型的预测能力。
技术实现思路
1、本发明公开了基于动态常微分图神经网络的交通流量预测方法及装置。该方法将目前常用的图神经网络与常微分方程结合起来,旨在通过gcn抽取交通流数据历史空间特征的同时,又能使用ode解决深层gnn的节点数据相似问题。此外,本发明包括根据实际道路之间的空间特征构造道路交通图结构并对其进行预处理,使用注意力机制抽取时空特征,图卷积操作进一步聚合空间依赖并解决节点数据相似问题,采用单编码器架构,进一步融合交通流数据空间数据与时序数据,提高对交通流数据的预测精度。该方法相较于现有方法稳定性好、推理速度快、预测误差更小。
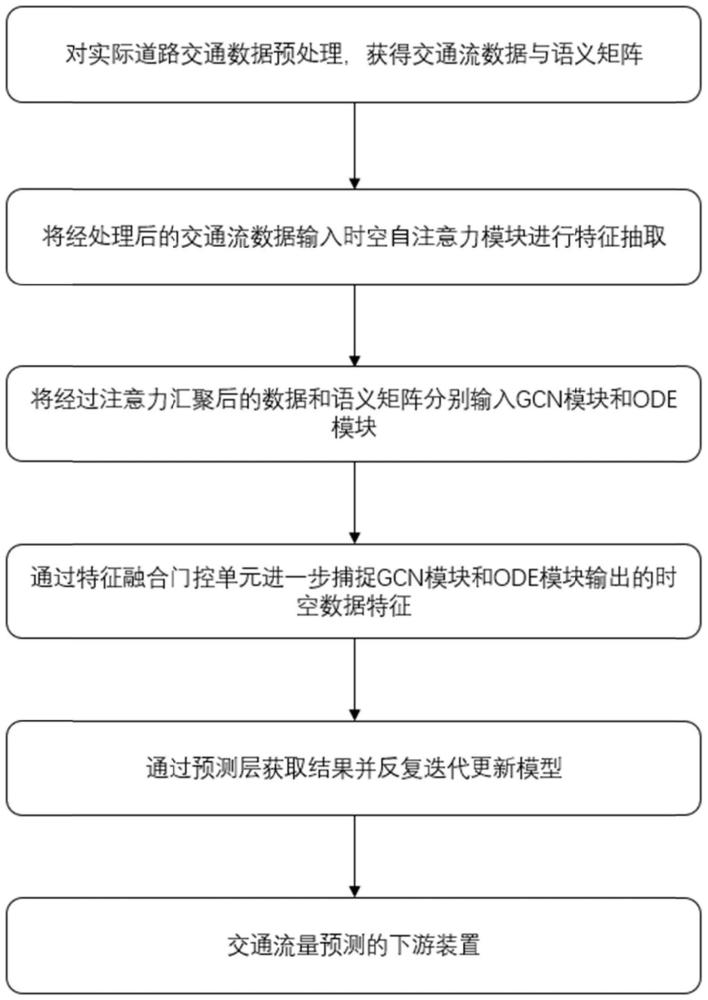
2、本发明实现其发明目的,所采用的技术方案是,基于动态常微分图神经网络的交通流量预测方法,其步骤如下:
3、步骤1:根据实际道路之间的空间特征构造道路交通图结构并对其进行预处理,得到交通流数据代表t个时刻的交通流数据,本发明通过捕获每个节点概率分布之间的相关属性来表示节点之间的动态空间依赖关系,进一步计算两节点间的代价并构建语义矩阵
4、步骤2:构建时空自注意力模块,将交通流数据输入到时空自注意力模块,抽取并融合其时序不确定特征与空间不确定特征。其时序自注意力机制的公式表达式为:
5、
6、
7、其中,为三个可学习参数矩阵,代表t时刻交通流数据输入,softmax(·)用来归一化时序依赖性,用来防止softmax函数导致的饱和。
8、类似的,其空间自注意力机制的公式表达式为:
9、
10、
11、因此,t时刻节点的时序特征和空间特征由tat和sat更新并表示。
12、步骤3:根据图神经网络原理构建图卷积网络模块(gcn模块)与常微分方程模块(ode模块),gcn通过对邻域节点的特征进行采样和聚合来捕捉空间依赖,使用ode模块来缓和gcn的节点数据相似问题:
13、(1)利用k阶chebyshev多项式tk来聚合每个时间步上的图信号信息,其公式表达式为:
14、
15、其中,gθ代表近似卷积核,*g代表图卷积操作,gθ*gx表示用核函数gθ对图g中的信号x进行滤波。θ为多项式系数。tk(x)为chebyshev多项式,其递归表达式为tk(x)=2xtk-1(x)-tk-2(x)其中t0(x)=1,t1(x)=x,本发明中通常取3阶chebyshev多项式。其中l为步骤1所述a矩阵的laplacian矩阵,in为单位矩阵,λmax是laplacian矩阵的最大特征值;
16、(2)本发明以连续图神经网络和常微分方程为理论基础,设计出ode模块,即微分方程求解器odesolve,其公式表达式为:
17、
18、其中为上游网络输入的初始值,a矩阵为步骤1所述语义矩阵,in为单位矩阵,u为时间变换矩阵,w为特征变换矩阵,为第t时刻的隐嵌入。
19、步骤4:构建特征融合门控单元,建立门机制来融合来自gcn模块和ode模块的时空数据特征,其公式表达式为:
20、
21、
22、其中fg和fo为线性投影函数,随后得到加权和yl将持续输入到下一层神经网络进行训练。
23、步骤5:将融合了时序与空间信息的数据输入预测层,并根据定义的损失函数利用反向传播不断更新模型参数,进一步优化模型使得预测结果更加精确。具体为将最后一个时空模块输出的结果输入到两个一维卷积层进行最后的预测,其公式表达式为:
24、y=fullyconnected(yl)=conv(conv(yl))
25、本发明选择使用huber loss作为损失函数:其公式表达式为:
26、
27、其中超参数δ可以用来控制对异常值的敏感度。
28、一种基于动态常微分图神经网络的交通流量预测装置,包括电源,输入输出设备,交通信号采集传感器,至少一个处理器和存储器;其存储器可存储至少一个处理器执行的指令;处理器用于运行所述计算机可执行命令,计算机可执行上述的基于动态常微分图神经网络的交通流量预测方法。
29、与现有技术相比,本发明的有益效果是:
30、1、传统的静态邻接矩阵不能充分体现道路交通网络的空间依赖性,对图节点的特征提取存在限制。本发明通过捕获每个节点概率分布之间的相关属性来表示节点之间的动态空间依赖关系,构造出更有更强表征能力的语义矩阵a;
31、2、目前广泛使用gnn对交通流的空间依赖性进行建模,然而传统的gcn被证明存在节点数据相似问题,严重限制了gnn的深度,从而难以准确捕捉空间特征。本发明通过使用ode模块来缓解上述问题,增强模型捕捉空间特征的能力,提高交通流预测精度;
32、3、本发明设计了一种特征融合门控单元,将gcn模块与ode模块进行融合,使得模型既继承gnn的空间建模能力,又能有效缓解节点数据相似问题,进一步提高模型的泛化性。
技术特征:
1.基于动态常微分图神经网络的交通流量预测方法,其特征在于,所述方法包括:
2.根据权利要求1所述的基于动态常微分图神经网络的交通流量预测方法,其特征在于,所述步骤1中:
3.根据权利要求1所述的基于动态常微分图神经网络的交通流量预测方法,其特征在于,所述步骤2中:
4.根据权利要求1所述的基于动态常微分图神经网络的交通流量预测方法,其特征在于,所述步骤3中:
5.根据权利要求1所述的基于动态常微分图神经网络的交通流量预测方法,其特征在于,所述步骤4中:
6.根据权利要求1所述的基于动态常微分图神经网络的交通流量预测方法,其特征在于,所述步骤5中:
7.基于动态常微分图神经网络的交通流量预测装置,其特征在于,包括电源,输入输出设备,交通信号采集传感器,至少一个处理器和存储器;其存储器可存储至少一个处理器执行的指令;处理器用于运行所述计算机可执行命令,计算机可执行如权利要求1~6所述任一种方法。
技术总结
本发明公开了基于动态常微分图神经网络的交通流量预测方法及装置,本发明方法使用单编码器架构,系统模块包括:建立道路交通网络语义矩阵模块,空间依赖捕捉模块,时间依赖提取模块,动态图常微分网络模块,图卷积神经网络模块,特征融合门控单元,交通流量预测模块和终端设计模块。本发明为解决传统交通流量预测方法中图神经网络节点数据相似(Over‑Smoothing)问题,引入动态图常微分网络,使用常微分方程抽象出道路交通网络拓扑结构的解析解,通过构建时空注意力模块提取时空特征,并使用特征融合门控单元进一步捕捉道路交通流时空数据特征,从而提升交通流量预测精度。
技术研发人员:杜圣东,杨涛,胡节,苏敏,叶先耀
受保护的技术使用者:西南交通大学
技术研发日:
技术公布日:2024/3/31
- 还没有人留言评论。精彩留言会获得点赞!