一种G形臂控制遥控器的制作方法
本技术涉及医疗器械,尤其涉及一种g形臂控制遥控器。
背景技术:
1、移动式g形臂是一种外科手术中常用的影像透视设备。常见的影像透视设备都是配有脚闸或手闸进行有线连接到设备,控制线缆长、乱,不便于整理,一般的手术室空间都比较紧凑,设备相对较多,控制线缆的连接及拖拽会给手术医生及护士带来不便,影响手术进度。
技术实现思路
1、本实用新型的目的在于提供一种g形臂控制遥控器,解决了在使用移动式g形臂的过程中,控制线缆的连接及拖拽会给手术医生及护士带来不便,影响手术进度的问题。
2、为实现上述目的,本实用新型采用的一种g形臂控制遥控器,包括电源稳压电路、按键触发电路、按键检测电路和无线串口通信模块,所述按键触发电路与所述按键检测电路电性连接,所述无线串口通信模块与所述按键检测电路电性连接,所述电源稳压电路分别与所述按键触发电路、所述按键检测电路和所述无线串口通信模块电性连接;
3、所述按键触发电路用于触发g形臂的控制信号;
4、所述按键检测电路用于检测g形臂的控制信号;
5、所述无线串口通信模块用于将控制信号发送至g形臂;
6、所述电源稳压电路用于分别为所述按键触发电路、所述按键检测电路和所述无线串口通信模块提供电源。
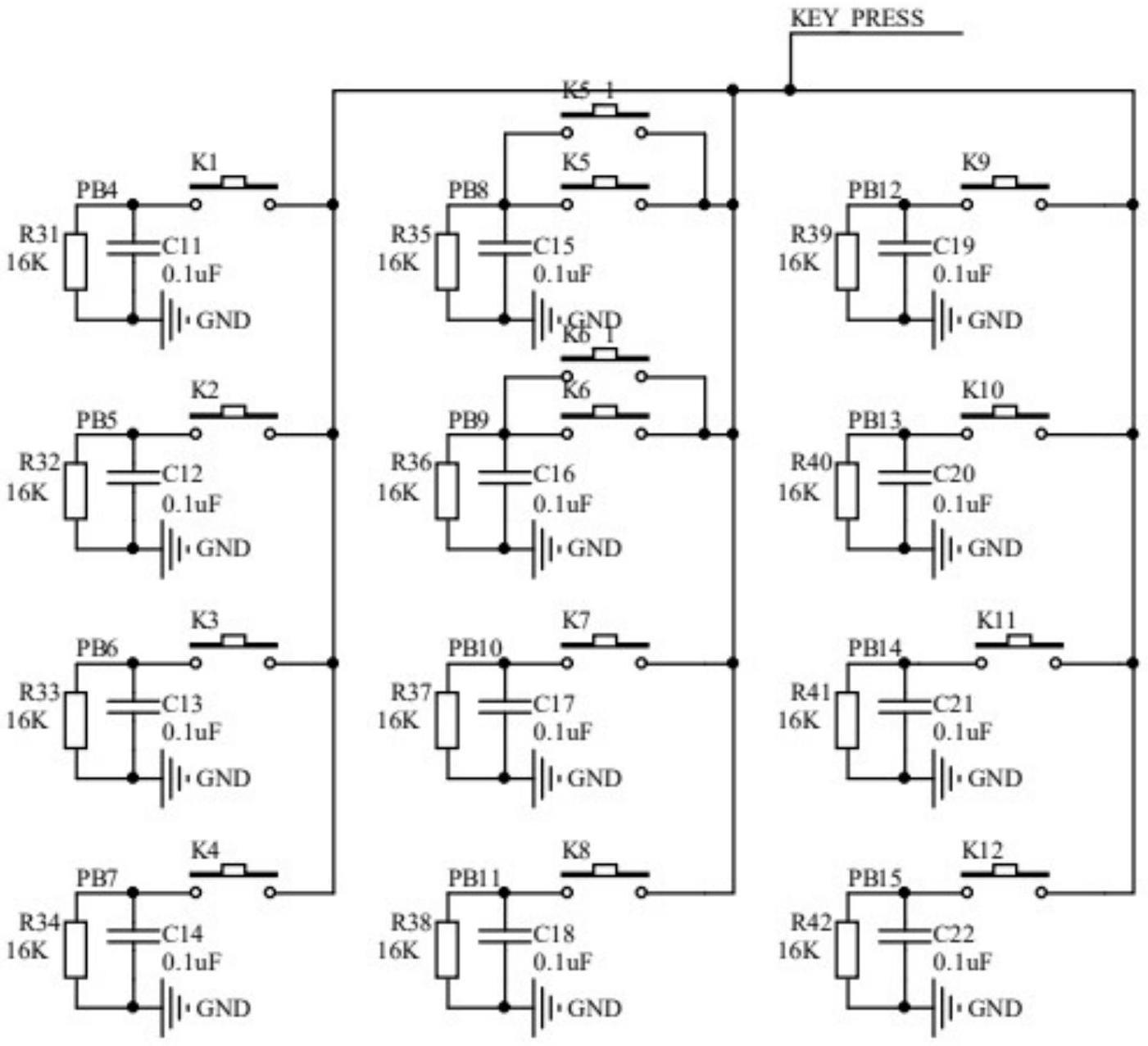
7、其中,所述按键触发电路包括按键k1、按键k2、按键k3、按键k4、按键k5、按键k6、按键k7、按键k8、按键k9、按键k10、按键k11、按键k12、按键k5-1、按键k6-1、电阻r31、电阻r32、电阻r33、电阻r34、电阻r35、电阻r36、电阻r37、电阻r38、电阻r39、电阻r40、电阻r41、电阻r42、电容c11、电容c12、电容c13、电容c14、电容c15、电容c16、电容c17、电容c18、电容c19、电容c20、电容c21和电容c22,所述按键k1、所述按键k2、所述按键k3、所述按键k4、所述按键k5、所述按键k6、所述按键k7、所述按键k8、所述按键k9、所述按键k10、所述按键k11、所述按键k12、所述按键k5-1和所述按键k6-1分别与所述按键检测电路电性连接,所述电阻r31和所述电容c11分别与所述按键k1电性连接,所述电阻r32和所述电容c12分别与所述按键k2电性连接,所述电阻r33和所述电容c13分别与所述按键k3电性连接,所述电阻r34和所述电容c14分别与所述按键k4电性连接,所述电阻r35和所述电容c15分别与所述按键k5电性连接,所述按键k5-1分别与所述电阻r35和所述电容c15电性连接,所述电阻r36和所述电容c16分别与所述按键k6电性连接,所述按键k6-1分别与所述电阻r36和所述电容c16电性连接,所述电阻r37和所述电容c17分别与所述按键k7电性连接,所述电阻r38和所述电容c18分别与所述按键k8电性连接,所述电阻r39和所述电容c19分别与所述按键k9电性连接,所述电阻r40和所述电容c20分别与所述按键k10电性连接,所述电阻r41和所述电容c21分别与所述按键k11电性连接,所述电阻r42和所述电容c22分别与所述按键k12电性连接。
8、其中,所述按键检测电路包括单片机u1、电容c5、电容c6、电容c7和电容c8,所述按键触发电路与所述单片机u1电性连接,所述电容c5、所述电容c6、所述电容c7和所述电容c8分别与所述单片机u1电性连接。
9、其中,所述电源稳压电路包括电阻r21、电阻r22、电阻r23、电阻r24、电阻r25、电阻r26、电容c34、三极管q1、三极管q2和三极管q3,所述按键触发电路与所述电阻r21电性连接,所述电阻r21、所述电阻r22、所述电阻r23和所述电阻r26分别与所述三极管q1电性连接,所述电容c34分别与所述电阻r23和所述三极管q2电性连接,所述电阻r24分别与所述三极管q2、所述三极管q3和所述电阻r25电性连接。
10、本实用新型的一种g形臂控制遥控器,通过所述按键触发电路用于触发g形臂的控制信号,所述按键检测电路用于检测g形臂的控制信号,所述无线串口通信模块用于将控制信号发送至g形臂,所述电源稳压电路用于分别为所述按键触发电路、所述按键检测电路和所述无线串口通信模块提供电源,能够获得避免在使用移动式g形臂时,控制线缆的连接及拖拽会给手术医生及护士带来不便,影响手术进度的效果。
技术特征:
1.一种g形臂控制遥控器,其特征在于,
2.如权利要求1所述的g形臂控制遥控器,其特征在于,
3.如权利要求1所述的g形臂控制遥控器,其特征在于,
4.如权利要求1所述的g形臂控制遥控器,其特征在于,
技术总结
本技术涉及医疗器械技术领域,具体涉及一种G形臂控制遥控器;包括电源稳压电路、按键触发电路、按键检测电路和无线串口通信模块,按键触发电路与按键检测电路电性连接,无线串口通信模块与按键检测电路电性连接,电源稳压电路分别与按键触发电路、按键检测电路和无线串口通信模块电性连接;按键触发电路用于触发G形臂的控制信号;按键检测电路用于检测G形臂的控制信号;无线串口通信模块用于将控制信号发送至G形臂;电源稳压电路用于分别为按键触发电路、按键检测电路和无线串口通信模块提供电源,通过上述结构的设置,能够获得避免在使用移动式G形臂时,控制线缆的连接及拖拽会给手术医生及护士带来不便,影响手术进度的效果。
技术研发人员:石建峰,李鹏志
受保护的技术使用者:北京中麦智造医疗设备有限公司
技术研发日:20230110
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!