一种面向立体车位的二阶段车位线检测方法与流程
本发明属于自动泊车,特别涉及一种面向立体车位的车位线检测方法。
背景技术:
1、随着日渐紧张的停车车位,许多地方都出现空间占用率更高的立体车位,然而由于立体车位宽度相比于平面车位十分狭窄,大大增加了停车的难度。传统平面泊车一般采用依赖地面平坦和接地的逆透视变换(ipm)技术,拼接而成的环视俯视图,并在环视俯视图中进行车位检测,并将车位转换到自车坐标系进行下游任务。
2、立体车位自动泊车的难度之一是立体车位一般存在高度,而面对存在高度的立体车位,直接使用环视俯视图中的结果显然是不可行的,这是由于环视拼接算法基于逆透视变换(ipm),ipm只能表征地平面的信息,有一定高度的目标都会在图片上产生畸变,所以需要假设地面平坦、目标接地。对于一般平面车位来讲地面一般是平坦、接地的,所以直接在环视图像上对车位进行识别并直接给出,具有一定的可行性。然而立体车位一般具有一定高度,这一情况导致直接在环视图中检测车位并根据像素坐标系到车辆坐标系转换关系,转换输出的车位坐标将会产生很大的偏差。
技术实现思路
1、本发明的目的是:为了提高最终泊入位置的精准性,提供一种面向立体车位的二阶段车位线检测方法。
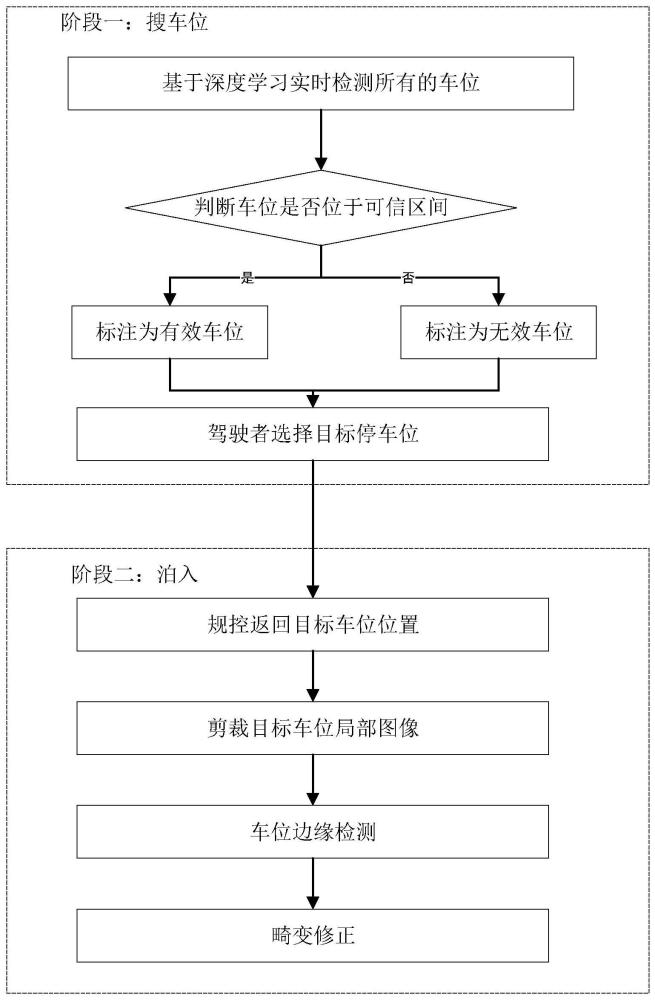
2、本发明的技术方案是:一种面向立体车位的二阶段车位线检测方法,该方法将自动泊车划分为搜车位和泊入两个阶段;阶段一:搜车位阶段由基于深度学习的车位检测模型搜索、检测当前帧图像中的所有的停车位,将位于可信区间的停车位标注为有效车位,在驾驶者选择相应的目标停车位后,开始自动泊入阶段;阶段二:在泊入阶段,视觉感知不再进行车位检测,仅对车位线进行检测,检测出车位线边缘后对其进行畸变修正。
3、上述方案中,具体的,所述阶段一包括以下步骤:
4、s1.1环视拼接;
5、从车载的四个环视鱼眼摄像头中获取图像,通过拼接融合得到一幅bev视角的环视拼接图像;
6、s1.2车位检测;
7、获取当前帧图像中的所有车位;
8、s1.3坐标转换;
9、将车位在环视拼接图像中的坐标转化到自车坐标系中;
10、s1.4可信区间判断;
11、根据实验,将四个角点纵坐标位于自车坐标系设定区间内的车位设置为有效车位;
12、s1.5目标停车位选择;
13、显示所有有效的车位,由驾驶者选择目标停车位。
14、上述方案中,具体的,所述阶段二包括以下步骤:
15、s2.1规控返回目标车位位置;
16、规控记录该车位的位置,并根据自车的运动实时输出目标车位的最新位置;
17、s2.2剪裁目标车位局部图像;
18、从车载的四个环视鱼眼摄像头中获取图像,通过拼接融合得到一幅bev视角的环视拼接图像;在环视拼接图像中确定目标车位的位置,以目标车位的位置为基准,向上下左右各扩充n个像素宽度作为目标车位的局部图像;将该局部图像裁剪;
19、s2.3车位边缘检测;
20、利用基于深度学习的重定位线检测模型、基于霍夫变换的车位边缘辅助检测模型分别对于该局部图像进行检测;
21、以重定位线检测模型的检测结果作为车位边缘辅助检测模型检测结果的筛选条件,若车位边缘辅助检测模型检测出满足筛选条件的直线,则对筛选出的直线两端坐标取均值,均值作为检测重定位线;若车位边缘辅助检测模型未检测出满足筛选条件的直线,则采用重定位线检测模型的检测结果作为车位边缘的检测重定位线;
22、s2.4对检测重定位线的畸变进行修正;
23、对左侧检测重定位线或右侧检测重定位线所产生的畸变进行修正,确定实际重定位线入口线处的四个角点;
24、s2.5坐标转换;
25、将实际重定位线的四个角点从像素坐标系转化到自车坐标系,确定为目标车位的左右边线。
26、有益效果:本发明将自动泊车划分为搜车位和泊入两个阶段,相比于只在搜车位阶段保存车位检测模型输出的车位线位置,本发明在整个泊入阶段规控可以实时按照最新的车位线位置进行控制和修正,因此可以得到更精确的车位线定位。同时,本发明通过在搜车位阶段设置可信区间,在泊入阶段进一步对重定位线进行畸变修正,减小了车位误差,通过测试,采用本发明所述方法在测试范围立体车位中泊车成功率达到95%以上。
技术特征:
1.一种面向立体车位的二阶段车位线检测方法,其特征在于,该方法将自动泊车划分为搜车位和泊入两个阶段;阶段一:搜车位阶段由基于深度学习的车位检测模型搜索、检测当前帧图像中的所有的停车位,将位于可信区间的停车位标注为有效车位,在驾驶者选择相应的目标停车位后,开始自动泊入阶段;阶段二:在泊入阶段,视觉感知不再进行车位检测,仅对车位线进行检测,检测出车位线边缘后对其进行畸变修正。
2.如权利要求1所述的一种面向立体车位的二阶段车位线检测方法,其特征在于,所述阶段一包括以下步骤:
3.如权利要求1或2所述的一种面向立体车位的二阶段车位线检测方法,其特征在于,所述阶段二包括以下步骤:
4.如权利要求2所述的一种面向立体车位的二阶段车位线检测方法,其特征在于,所述s1.4中,将可信区间设定为自车坐标系内纵向[442,3122],单位mm。
5.如权利要求3所述的一种面向立体车位的二阶段车位线检测方法,其特征在于,所述s2.3中的筛选条件为:车位边缘辅助检测模型检测结果是否与重定位线检测模型的检测结果的角度差值在3度以内,距离差值在3个像素的以内。
6.如权利要求3所述的一种面向立体车位的二阶段车位线检测方法,其特征在于,s2.4中,采用以下方法进行修正:
技术总结
本发明属于自动泊车技术领域,特别涉及一种面向立体车位的车位线检测方法。一种面向立体车位的二阶段车位线检测方法,该方法将自动泊车划分为搜车位和泊入两个阶段;搜车位阶段由基于深度学习的车位检测模型搜索、检测当前帧图像中的所有的停车位,将位于可信区间的停车位标注为有效车位,在驾驶者选择相应的目标停车位后,开始自动泊入阶段;在泊入阶段,视觉感知不再进行车位检测,仅对车位线进行检测,检测出车位线边缘后对其进行畸变修正。本发明在搜车位阶段通过设置可信区间,减小了车位误差。在泊入阶段,实时按照最新的车位线位置进行控制和修正,获得精确车位线定位。
技术研发人员:郑瑞,于宏啸
受保护的技术使用者:广州路派流马科技有限公司
技术研发日:
技术公布日:2024/3/31
- 还没有人留言评论。精彩留言会获得点赞!