用于半导体工艺设备的安装定位机构的制作方法
1.本发明涉及半导体设备技术领域,具体地,涉及一种用于半导体工艺设备的安装定位机构。
背景技术:
2.在硅外延设备中,通常设置有旋转升降装置,旋转升降装置一方面可以驱动三个顶针同时升降,以通过三个顶针的升降与机械手的移动来配合完成晶圆(wafer)的取放,另一方面可以驱动托盘旋转,以通过托盘带动承载的晶圆旋转,提高工艺均匀性。在取放晶圆的过程中,都会出现机械手从三个顶针中相邻的两个顶针之间穿过的情况,并且,基于稳定性的考虑,三个顶针的位置固定,当机械手处于两个顶针之间时,机械手两侧的两个顶针与机械手之间的间隙很小(约2.5mm),这就使得对于三个顶针的位置要求极高,而由于三个顶针与旋转升降装置不会产生相对旋转,因此,就使得在安装旋转升降装置时,对于旋转升降装置的定位要求极高。
3.现有的旋转升降装置包括驱动组件和传动组件,三个顶针设置于传动组件上,驱动组件通过驱动传动组件以实现三个顶针的升降。安装旋转升降装置的方式,通常是将驱动组件挂接在工艺腔室底部,并使传动组件和三个顶针穿过工艺腔室底部的支架中的开口。对于旋转升降装置的定位,通常是当驱动组件挂接在工艺腔室上后,用盒尺分别测量驱动组件上的几个点到工艺腔室的门阀的距离,根据这些距离数据对驱动组件进行调整后,再将驱动组件与工艺腔室进行紧固,即,通过对驱动组件的定位,来对三个顶针进行定位。但是,由于工艺腔室底部的线缆及水气输送管路等较多,使得测量非常不方便,并且,盒尺测量精度低,误差大,另外,由于测量没有统一的标准,常常出现驱动组件调整好后,机械手与顶针仍发生干涉的现象,而这就需要再次调整,费时费工。
技术实现要素:
4.本发明旨在至少解决现有技术中存在的技术问题之一,提出了一种用于半导体工艺设备的安装定位机构,其能够提高旋转升降装置安装的定位精度,并提高定位的便捷性,从而提高顶针安装的定位精度,避免顶针与机械手发生干涉,提高半导体设备的使用稳定性。
5.为实现本发明的目的而提供一种用于半导体工艺设备的安装定位机构,所述半导体工艺设备包括工艺腔室、旋转升降装置、机械手和至少三个顶针,至少三个所述顶针间隔设置用于支撑晶圆,所述旋转升降装置上设置有用于一一对应支撑各所述顶针的多个顶针支架,所述工艺腔室的底部设置有腔室支架,所述腔室支架中开设有供多个所述顶针支架穿入的开口,所述机械手用于从相邻的两个所述顶针之间穿过取放所述晶圆,所述安装定位机构包括限位结构和定位结构,其中,
6.所述限位结构能够与所述腔室支架可拆卸的连接;所述定位结构设置在所述限位结构上,用于在所述限位结构与所述腔室支架连接时,通过对多个所述顶针支架在所述开
口中的位置进行定位,以对所述旋转升降装置的安装位置进行定位,使进入所述工艺腔室内的所述机械手能够从相邻的两个所述顶针之间穿过。
7.可选的,所述定位结构包括定位板,所述定位板用于在所述限位结构与所述腔室支架连接时,伸入至所述开口中与至少一个所述顶针支架接触,以对多个所述顶针支架在所述开口中的位置进行定位,所述定位板与至少一个所述顶针支架接触时,多个所述顶针支架所在的位置能够使进入所述工艺腔室内的所述机械手能够从相邻的两个所述顶针之间穿过。
8.可选的,所述定位板在平行于所述开口的轴向的方向上可移动的设置在所述限位结构上,用于使所述定位板在所述限位结构与所述腔室支架连接时,能够沿平行于所述开口的轴向的方向朝所述开口内伸入,或者从所述开口内朝所述开口外退出。
9.可选的,所述限位结构上设置有限位凸块,所述定位板上开设有长孔,所述长孔的长轴与所述开口的轴向平行,所述限位凸块可沿所述长孔的长轴滑动的设置在所述长孔中,且所述限位凸块在垂直于所述长孔的长轴的方向上与所述长孔配合固定,以使所述定位板在平行于所述开口的轴向的方向上可移动的设置在所述限位结构上。
10.可选的,所述安装定位结构还包括紧固件,所述紧固件用于与所述限位凸块配合,对所述定位板进行固定。
11.可选的,所述限位结构包括支撑部件、调节组件、第一限位件和第二限位件,其中,所述支撑部件能够沿其延伸方向支撑在所述腔室支架上,所述定位结构设置在所述支撑部件上;所述第一限位件和所述第二限位件相对设置于所述支撑部件的两端,用于分别与所述腔室支架的相对的两侧贴合;
12.所述调节组件设置在所述支撑部件上,并与所述第一限位件和所述第二限位件连接,用于调节所述第一限位件和所述第二限位件之间的距离,并能够使所述第一限位件和所述第二限位件在二者相对的方向上移动相同距离。
13.可选的,所述调节组件包括第一调节件、第二调节件和同步部件,其中,所述第一调节件和所述第二调节件沿所述支撑部件的延伸方向平行设置于所述支撑部件上,并分别与所述第一限位件和所述第二限位件连接;
14.所述同步部件可转动的设置在所述支撑部件上,并位于所述第一调节件和所述第二调节件之间,且与所述第一调节件和所述第二调节件均配合连接,用于同步带动所述第一调节件和所述第二调节件相对滑动,以使所述第一限位件和所述第二限位件在二者相对的方向上移动相同距离。
15.可选的,所述同步部件包括固定轴和齿轮,所述第一调节件包括第一齿条结构,所述第二调节件包括第二齿条结构,其中,所述固定轴设置在所述支撑部件上,并位于所述第一调节件和所述第二调节件之间,所述齿轮可转动的套设在所述固定轴上,并分别与所述第一齿条结构和所述第二齿条结构啮合。
16.可选的,所述固定轴上设置有限位凹槽,所述同步部件还包括限位卡环,所述限位卡环与所述齿轮背离所述支撑部件的一侧面相抵,并卡入至所述限位凹槽中,用于将所述齿轮卡在其与所述支撑部件之间。
17.可选的,所述支撑部件上设置有第一滑槽和第二滑槽,其中,所述第一滑槽和所述第二滑槽沿所述支撑部件的延伸方向平行设置,所述第一调节件和所述第二调节件分别可
滑动的设置在所述第一滑槽和所述第二滑槽中。
18.本发明提供的用于半导体工艺设备的安装定位机构,在对旋转升降装置进行定位时,通过将限位结构与腔室支架连接,可以借助设置在限位结构上的定位结构,对多个顶针支架在开口中的位置进行定位,以对旋转升降装置的安装位置进行定位,使进入工艺腔室内的机械手能够从相邻的两个顶针之间穿过,这样一方面可以避开在定位安装旋转升降装置时周围的线缆及水气输送管路等会对定位造成的干扰,另一方面可以使得每次在对旋转升降装置的安装位置进行定位时的定位标准统一,再一方面可以无需使用盒尺等测量工具进行尺寸测量,避免测量产生的误差,继而能够提高旋转升降装置安装的定位精度,并提高定位的便捷性,进而能够提高顶针安装的定位精度,避免顶针与机械手发生干涉,提高半导体设备的使用稳定性。
附图说明
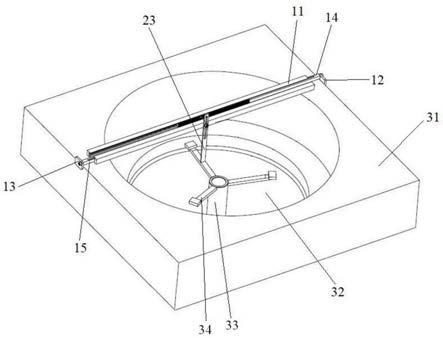
19.图1为本发明实施例提供的安装定位机构对旋转升降装置的安装位置进行定位时的结构示意图;
20.图2为本发明实施例提供的安装定位机构的结构示意图;
21.图3为本发明实施例提供的安装定位机构的局部放大结构示意图;
22.附图标记说明:
23.11
‑
支撑部件;12
‑
第一限位件;13
‑
第二限位件;14
‑
第一调节件;15
‑
第二调节件;16
‑
同步部件;161
‑
固定轴;162
‑
齿轮;163
‑
限位卡环;17
‑
第一齿条结构;18
‑
第二齿条结构;19
‑
第一滑槽;21
‑
第二螺栓;22
‑
第三螺栓;23
‑
定位板;24
‑
长孔;25
‑
限位凸块;26
‑
紧固件;31
‑
腔室支架;32
‑
开口;33
‑
传动部件;34
‑
顶针支架。
具体实施方式
24.为使本领域的技术人员更好地理解本发明的技术方案,下面结合附图来对本发明提供的安装定位机构进行详细描述。
25.如图1所示,本实施例提供一种用于半导体工艺设备的安装定位机构,半导体工艺设备包括工艺腔室(图中未示出)、旋转升降装置、机械手(图中未示出)和至少三个顶针(图中未示出),至少三个顶针间隔设置用于支撑晶圆(图中未示出),旋转升降装置上设置有用于一一对应支撑各顶针的多个顶针支架34,工艺腔室的底部设置有腔室支架31,腔室支架31中开设有供多个顶针支架34穿入的开口32,机械手用于从相邻的两个顶针之间穿过取放晶圆,安装定位机构包括限位结构和定位结构,其中,限位结构能够与腔室支架31可拆卸的连接;定位结构设置在限位结构上,用于在限位结构与腔室支架31连接时,通过对多个顶针支架34在开口32中的位置进行定位,以对旋转升降装置的安装位置进行定位,使进入工艺腔室内的机械手能够从相邻的两个顶针之间穿过。
26.为了便于对本发明实施例提供的用于半导体工艺设备的安装定位机构进行介绍,首先对本发明实施例提供的用于半导体工艺设备的安装定位机构所应用的一种半导体工艺设备进行介绍。如图1所示,半导体工艺设备可以包括工艺腔室(图中未示出)、旋转升降装置、机械手和三个顶针(图中未示出),其中,旋转升降装置可以包括驱动部件(图中未示出)、传动部件33(例如,传动轴)和三个顶针支架34,三个顶针支架34沿传动部件33的周向
间隔的设置在传动部件33上,三个顶针一一对应的设置在三个顶针支架34上,三个顶针支架34用于一一对应的支撑三个顶针,以使三个顶针间隔设置用于支撑晶圆,驱动部件通过传动部件33与三个顶针支架34连接,用于通过驱动传动部件33升降,以带动三个顶针支架34升降,从而带动三个顶针升降,继而带动三个顶针上的晶圆升降,工艺腔室的底部设置有腔室支架31,腔室支架31中开设有供旋转升降装置的传动部件33和三个顶针支架34穿过的开口32,工艺腔室内设置有托盘(图中未示出),托盘用于在半导体工艺中承载晶圆进行半导体工艺,机械手能够携带晶圆进入或退出工艺腔室,并能够从相邻的两个顶针之间穿过,从而通过与三个顶针配合,实现晶圆的取放。旋转升降装置在安装时,旋转升降装置的驱动部件可以设置在工艺腔室外部,旋转升降装置的传动部件33和三个顶针支架34伸入至开口32中,以使三个顶针能够伸入至工艺腔室内,在半导体工艺中与机械手配合实现晶圆的取放。在晶圆的取放过程中,驱动部件通过驱动三个顶针上升,以借助三个顶针将位于机械手或托盘上的晶圆顶起,或者驱动部件通过驱动三个顶针下降,以借助三个顶针将位于其上的晶圆放置于托盘或机械手上,从而实现晶圆在机械手与托盘之间的传递。
27.但是,本发明实施例提供的用于半导体工艺设备的安装定位机构所应用的半导体工艺设备并不以此为限,例如,顶针支架的数量以及顶针的数量并不以此为限,顶针支架的数量以及顶针的数量也可以为四个、五个或更多个。
28.本发明实施例提供的用于半导体工艺设备的安装定位机构,在对旋转升降装置的安装位置进行定位时,通过将限位结构与腔室支架31连接,可以借助设置在限位结构上的定位结构,对多个顶针支架34在开口32中的位置进行定位,以对旋转升降装置的安装位置进行定位,使进入工艺腔室内的机械手能够从相邻的两个顶针之间穿过,这样一方面可以避开旋转升降装置的驱动部件周围的线缆及水气输送管路等会对定位造成干扰的器件,另一方面可以使得每次在对旋转升降装置的安装位置进行定位时的定位标准统一,再一方面可以无需使用盒尺等测量工具进行尺寸测量,避免测量产生的误差,继而能够提高旋转升降装置安装的定位精度,并提高定位的便捷性,进而在将顶针安装至传动部件33上后,能够提高顶针安装的定位精度,避免顶针与机械手发生干涉,提高半导体设备的使用稳定性。
29.具体来说,一方面由于本发明实施例提供的用于半导体工艺设备的安装定位机构,是通过对多个顶针支架34在开口32中的位置进行定位,以对旋转升降装置的安装位置进行定位,而不是通过对旋转升降装置的驱动部件进行定位,以对旋转升降装置的安装位置进行定位,因此,可以避开驱动部件周围的线缆及水气输送管路等会对定位造成干扰的器件,从而提高旋转升降装置安装的定位精度,并提高定位的便捷性。
30.另一方面由于每次在使用本发明实施例提供的用于半导体工艺设备的安装定位机构对旋转升降装置的安装位置进行定位时,都会将限位结构与腔室支架31连接,并借助定位结构对多个顶针支架34在开口32中的位置进行定位,以对旋转升降装置的安装位置进行定位,而定位结构是设置在限位结构上,因此,在每次对旋转升降装置的安装位置进行定位时,均是借助限位结构和设置在限位结构上的定位结构来实现的,这就使得每次在对旋转升降装置的安装位置进行定位时的定位标准统一,从而能够提高旋转升降装置安装的定位精度,并提高定位的便捷性。
31.再一方面由于本发明实施例提供的用于半导体工艺设备的安装定位机构在对旋转升降装置的安装位置进行定位时,仅需通过将限位结构与腔室支架31连接,就可以借助
定位结构通过对多个顶针支架34在开口32中的位置进行定位,以对旋转升降装置的安装位置进行定位,而无需使用盒尺等测量工具对旋转升降装置与工艺腔室之间的一些相关尺寸进行测量,就可以对旋转升降装置的安装位置进行定位,从而可以避免人为测量产生的误差对定位造成影响,进而能够提高旋转升降装置安装的定位精度,并提高定位的便捷性。
32.在安装旋转升降装置的过程中,可以先将旋转升降装置与工艺腔室连接,但无需将旋转升降装置与工艺腔室紧固,即,将旋转升降装置与工艺腔室连接,且使旋转升降装置能够相对于工艺腔室活动,再借助本发明实施例提供的用于半导体工艺设备的安装定位机构对旋转升降装置的安装位置进行定位,即,将限位结构与腔室支架31连接,并借助限位结构上的定位结构,通过对多个顶针支架34在开口32中的位置进行定位,以对旋转升降装置的安装位置进行定位,若定位结构对多个顶针支架34在开口32中的位置进行定位,确认旋转升降装置位于安装位置,则可以将限位结构从腔室支架31上拆卸下来,并将旋转升降装置与工艺腔室紧固,从而完成旋转升降装置的定位及安装,若定位结构对多个顶针支架34在开口32中的位置进行定位,发现旋转升降装置未位于安装位置,则可以通过调整旋转升降装置的位置,对开口32中的多个顶针支架34的位置进行调整,使开口32中的多个顶针支架34移动至定位结构对多个顶针支架34在开口32中的位置进行定位,能够确认旋转升降装置位于安装位置的位置,待定位结构对多个顶针支架34在开口32中的位置进行定位,确认旋转升降装置位于安装位置后,再将限位结构从腔室支架31上拆卸下来,并将旋转升降装置与工艺腔室紧固,从而完成旋转升降装置的定位及安装。
33.如图1
‑
图3所示,在本发明一优选实施例中,定位结构可以包括定位板23,定位板23用于在限位结构与腔室支架31连接时,伸入至开口32中与至少一个顶针支架34接触,以对多个顶针支架34在开口32中的位置进行定位,定位板23与至少一个顶针支架34接触时,多个顶针支架34所在的位置能够使进入工艺腔室内的机械手能够从相邻的两个顶针之间穿过。
34.如图1所示,在安装旋转升降装置时,传动部件33和三个顶针支架34均伸入至开口32中,在使用本发明实施例提供的用于半导体工艺设备的安装定位机构对旋转升降装置的安装位置进行定位时,将限位结构与腔室支架31连接,此时,定位板23伸入至开口32中,观察定位板23是否能够与至少一个顶针支架34接触,若定位板23能够与至少一个顶针支架34接触,则多个顶针支架34所在的位置能够使进入工艺腔室内的机械手能够从相邻的两个顶针之间穿过,可以确认旋转升降装置位于安装位置,完成对旋转升降装置的定位,若定位板23无法与至少一个顶针支架34接触,则可以通过调整旋转升降装置的位置,对开口32中的多个顶针支架34的位置进行调整,直到使定位板23能够与至少一个顶针支架34接触,则完成对旋转升降装置的定位。
35.如图1
‑
图3所示,可选的,定位板23可以竖直设置在限位结构上。这是由于各顶针通常会竖直设置在对应的顶针支架34上,以提高所有顶针支撑晶圆时的稳定性,而通过使定位板23竖直设置在限位结构上,可以将定位板23看做顶针的替代标识,若定位板23处于与机械手交错的位置,则顶针也处于与机械手交错的位置,因此,当定位板23与至少一个顶针支架34接触后,安装在各顶针支架34上的对应的顶针在半导体工艺中就会与机械手交错,不会与机械手发生干涉。
36.在本发明一优选实施例中,定位板23在平行于开口32的轴向的方向上可移动的设
置在限位结构上,用于使定位板23在限位结构与腔室支架31连接时,能够沿平行于开口32的轴向的方向朝开口32内伸入,或者从开口32内朝开口32外退出。
37.这样的设计是因为在安装旋转升降装置时,旋转升降装置的驱动部件驱动多个顶针支架34升降的高度不同,使得多个顶针支架34位于开口32中的位置并不一定,因此,在限位结构与腔室支架31连接之后,通过将定位板23在平行于开口32的轴向的方向上可移动的设置在限位结构上,使定位板23能够沿平行于开口32的轴向的方向朝开口32内伸入,或者从开口32内朝开口32外退出,可以在多个顶针支架34位于开口32中的位置较低时,通过使定位板23沿平行于开口32的轴向的方向朝开口32内伸入,以使定位板23能够与至少一个顶针支架34接触,或者在多个顶针支架34位于开口32中的位置较高时,通过使定位板23沿平行于开口32的轴向的方向从开口32内朝开口32外退出,以使定位板23能够与至少一个顶针支架34接触,从而提高安装定位机构的使用灵活性。
38.如图3所示,在本发明一优选实施例中,限位结构上可以设置有限位凸块25,定位板23上可以开设有长孔24,长孔24的长轴与开口32的轴向平行,限位凸块25可沿长孔24的长轴滑动的设置在长孔24中,且限位凸块25在垂直于长孔24的长轴的方向上与长孔24配合固定,以使定位板23在平行于开口32的轴向的方向上可移动的设置在限位结构上。
39.通过将限位凸块25可沿长孔24的长轴滑动的设置在长孔24中,由于长孔24的长轴与开口32的轴向平行,因此,这样就可以使定位板23沿长孔24的长轴滑动,即,使定位板23在平行于开口32的轴向的方向上移动,并且,通过使限位凸块25在垂直于长孔24的长轴的方向上与长孔24配合固定,可以避免定位板23沿垂直于长孔24的长轴的方向滑动,即,避免定位板23在垂直于开口32的轴向的方向上移动,从而实现使定位板23在平行于开口32的轴向的方向上可移动的设置在限位结构上。
40.如图2所示,在本发明一优选实施例中,安装定位结构可以还包括紧固件26,紧固件26用于与限位凸块25配合,对定位板23进行固定。
41.这样在定位板23与至少一个顶针支架34接触时,可以借助紧固件26与限位凸块25配合,对定位板23进行固定,避免定位板23的位置发生变化,便于对多个顶针支架34在开口32中的位置进行定位,从而提高安装定位机构的使用便捷性以及稳定性,并且,在需要使定位板23在平行于开口32的轴向的方向上移动时,可以取消紧固件26与限位凸块25的配合,以取消对定位板23的固定,使定位板23能够在平行于开口32的轴向的方向上移动,并且,借助紧固件26还可以避免定位板23在平行于开口32的轴向的方向上移动时与限位凸块25分离,从而便于移动定位板23,提高安装定位机构的使用灵活性以及稳定性。
42.可选的,紧固件26可以包括第一螺栓,限位凸块25中可以设置有与第一螺栓螺纹配合的第一螺纹孔,第一螺栓穿过长孔24,并与第一螺纹孔螺纹配合,以将定位板23与限位凸块25固定,从而对定位板23进行固定,并且,在需要使定位板23在平行于开口32的轴向的方向上移动时,可以旋松第一螺栓,使定位板23能够在平行于开口32的轴向的方向上移动。
43.如图2所示,在本发明一优选实施例中,限位结构可以包括支撑部件11、调节组件、第一限位件12和第二限位件13,其中,支撑部件11能够沿其延伸方向支撑在腔室支架31上,定位结构设置在支撑部件11上;第一限位件12和第二限位件13相对设置于支撑部件11的两端,用于分别与腔室支架31的相对的两侧贴合;调节组件设置在支撑部件11上,并与第一限位件12和第二限位件13连接,用于调节第一限位件12和第二限位件13之间的距离,并能够
使第一限位件12和第二限位件13在二者相对的方向上移动相同距离。
44.在将限位结构与腔室支架31连接时,可以将支撑部件11支撑在腔室支架31上,以借助支撑部件11对设置在其上的调节组件、第一限位件12和第二限位件13进行支撑,并借助调节组件调节第一限位件12和第二限位件13之间的距离,使第一限位件12和第二限位件13在二者相对的方向上相互靠近相同距离,以减小第一限位件12和第二限位件13之间的距离,从而借助设置于支撑部件11的两端的第一限位件12和第二限位件13分别与腔室支架31的相对的两侧贴合,将腔室支架31夹紧在二者之间,以使限位结构与腔室支架31连接,在将限位结构与腔室支架31拆卸时,可以借助调节组件调节第一限位件12和第二限位件13之间的距离,使第一限位件12和第二限位件13在二者相对的方向上相互远离相同距离,以增大第一限位件12和第二限位件13之间的距离,使第一限位件12和第二限位件13与腔室支架31分离,从而可以将限位结构从腔室支架31上拆卸下来。
45.并且,借助调节组件调节第一限位件12和第二限位件13之间的距离,可以使本发明实施例提供的用于半导体工艺设备的安装定位机构能够适用于,对不同尺寸的工艺腔室的旋转升降装置的安装位置进行定位。在实际应用中,不同尺寸的工艺腔室的腔室支架31的尺寸也不相同,腔室支架31的尺寸随工艺腔室的尺寸增大而增大,腔室支架31的尺寸随工艺腔室的尺寸减小而减小,当需要对较大尺寸的工艺腔室的旋转升降装置的安装位置进行定位时,则可以借助调节组件调节第一限位件12和第二限位件13之间的距离,使第一限位件12和第二限位件13在二者相对的方向上相互远离相同距离,以增大第一限位件12和第二限位件13之间的距离,从而使第一限位件12和第二限位件13能够与较大尺寸的腔室支架31的相对的两侧贴合,使限位结构能够与较大尺寸的腔室支架31连接,当需要对较小尺寸的工艺腔室的旋转升降装置的安装位置进行定位时,则可以借助调节组件调节第一限位件12和第二限位件13之间的距离,使第一限位件12和第二限位件13在二者相对的方向上相互靠近相同距离,以减小第一限位件12和第二限位件13之间的距离,从而使第一限位件12和第二限位件13能够与较小尺寸的腔室支架31的相对的两侧贴合,使限位结构能够与较小尺寸的腔室支架31连接,这样就无需为不同尺寸的工艺腔室,配备不同尺寸的安装定位机构,进而提高本发明实施例提供的用于半导体工艺设备的安装定位机构的适用性,并降低成本。
46.由于,调节组件在调节第一限位件12和第二限位件13之间的距离时,能够使第一限位件12和第二限位件13在二者相对的方向上移动相同距离,因此,不论调节组件如何调节第一限位件12和第二限位件13的间距,在限位结构与腔室支架31连接后,定位结构相对于开口32的位置均不会发生改变,从而在提高本发明实施例提供的用于半导体工艺设备的安装定位机构的适用性的基础上,还能够保证安装定位机构的定位准确性。
47.如图2所示,在本发明一优选实施例中,调节组件可以包括第一调节件14、第二调节件15和同步部件16,其中,第一调节件14和第二调节件15沿支撑部件11的延伸方向平行设置于支撑部件11上,并分别与第一限位件12和第二限位件13连接;同步部件16可转动的设置在支撑部件11上,并位于第一调节件14和第二调节件15之间,且与第一调节件14和第二调节件15均配合连接,用于同步带动第一调节件14和第二调节件15相对滑动,以使第一限位件12和第二限位件13在二者相对的方向上移动相同距离。
48.由于第一调节件14和第二调节件15沿支撑部件11的延伸方向平行设置于支撑部
件11上,并分别与第一限位件12和第二限位件13连接,并且,由于可转动的设置在第一调节件14和第二调节件15之间的同步部件16,可以与第一调节件14和第二调节件15均配合连接,同步带动第一调节件14和第二调节件15在第一调节件14和第二调节件15相对滑动,因此,通过转动与第一调节件14和第二调节件15均配合连接的同步部件16,可以同步带动第一调节件14和第二调节件15沿支撑部件11的延伸方向相对滑动,从而可以使与第一调节件14和第二调节件15分别连接的第一限位件12和第二限位件13在二者相对的方向上移动相同距离,即可以使第一限位件12和第二限位件13在二者相对的方向上相互靠近或远离相同距离。
49.如图2所示,可选的,第一限位件12和第一调节件14可以通过第二螺栓21固定连接,第一限位件12上可以设置有供第二螺栓21穿过的第一通孔,第一调节件14上可以设置有与第二螺栓21螺纹配合的第二螺纹孔,第二螺栓21穿过第一通孔,并与第二螺纹孔螺纹配合,从而将第一限位件12和第一调节件14固定连接。
50.如图2所示,可选的,第二限位件13和第二调节件15可以通过第三螺栓22固定连接,第二限位件13上可以设置有供第三螺栓22穿过的第二通孔,第二调节件15上可以设置有与第三螺栓22螺纹配合的第三螺纹孔,第三螺栓22穿过第二通孔,并与第三螺纹孔螺纹配合,从而将第二限位件13和第二调节件15固定连接。
51.如图3所示,在本发明一优选实施例中,同步部件16可以包括固定轴161和齿轮162,第一调节件14可以包括第一齿条结构17,第二调节件15可以包括第二齿条结构18,其中,固定轴161设置在支撑部件11上,并位于第一调节件14和第二调节件15之间,齿轮162可转动的套设在固定轴161上,并分别与第一齿条结构17和第二齿条结构18啮合。
52.由于固定轴161可转动的设置在支撑部件11上,而齿轮162套设在固定轴161上,因此,当第一调节件14在第一限位件12和第二限位件13相对的方向上移动时,设置在第一调节件14上的第一齿条结构17相对于与其啮合的齿轮162发生位移,从而带动齿轮162相对于固定轴161转动,而齿轮162的转动又使得齿轮162相对于与其啮合的设置在第二调节件15上的第二齿条结构18发生位移,从而带动第二齿条结构18移动,继而带动第二调节件15在第一限位件12和第二限位件13相对的方向上移动,并且,由于齿轮162相对于第一齿条结构17产生的位移和齿轮162相对于第二齿条结构18产生的位移方向相反且距离相同,因此,可以使第一齿条结构17和第二齿条结构18朝相反方向移动相同距离,从而使第一调节件14和第二调节件15在二者相对的方向上移动相同距离。
53.如图3所示,在本发明一优选实施例中,固定轴161上可以设置有限位凹槽,同步部件16还包括限位卡环163,限位卡环163与齿轮162背离支撑部件11的一侧面相抵,并卡入至限位凹槽中,用于将齿轮162卡在其与支撑部件11之间。这样可以避免齿轮162在相对于固定轴161转动时,从固定轴161上脱出,从而提高安装定位机构的使用稳定性。
54.如图2所示,在本发明一优选实施例中,支撑部件11上可以设置有第一滑槽19和第二滑槽,其中,第一滑槽19和第二滑槽沿支撑部件11的延伸方向平行设置,第一调节件14和第二调节件15分别可滑动的设置在第一滑槽19中和第二滑槽中。
55.通过将第一调节件14和第二调节件15分别可滑动的设置在第一滑槽19和第二滑槽中,以借助第一滑槽19和第二滑槽分别限制第一调节件14和第二调节件15的滑动方向,而通过使第一滑槽19和第二滑槽沿支撑部件11的延伸方向平行设置,就可以使第一调节件
14和第二调节件15沿支撑部件11的延伸方向平行设置于支撑部件11上。
56.综上所述,本发明实施例提供的安装定位机构,能够提高旋转升降装置安装的定位精度,并提高定位的便捷性,从而提高顶针安装的定位精度,避免顶针与机械手发生干涉,提高半导体设备的使用稳定性。
57.可以解的是,以上实施方式仅仅是为了说明本发明的原理而采用的示例性实施方式,然而本发明并不局限于此。对于本领域内的普通技术人员而言,在不脱离本发明的精神和实质的情况下,可以做出各种变型和改进,这些变型和改进也视为本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1