电动机安全状态控制的制作方法
本发明涉及车辆电动机数字控制的应用领域,并且更具体地,涉及与此相关联的功能安全机构领域。
背景技术:
1、图5提供了典型的数字控制的电动机系统。
2、·1101:数字控制系统
3、·1102:电动机功率级(又称:逆变器)
4、·1103:电动机(这里是3相的示例,可能存在更多的相)
5、·1104:电机位置传感器系统
6、·1105:车辆电池电力线
7、本发明应对了当瞬时故障或永久故障导致驱动电动机功率晶体管的数字控制逻辑不再能够正确操作的情形时出现的问题。
8、在车辆中,该数字控制器经asil-d认证。这意味着它包含可以检测和报告以上提到的故障情形的安全检测机制。在最佳情况的情形下,数字控制器能够在可接受的反应时间内自动遏制或修复故障。在这种情况下,不需要另外的机制。
9、但是在最差情况的情形下,数字控制器“死机(dead)”,并且必须启用紧急逻辑来处理该问题。该逻辑能够超控数字控制信号,以驱动电动机功率级的安全状态。
10、图6提供了具有安全状态处理的数字控制的emotor系统。
11、·1201:超控功率级控制信号的安全状态管理逻辑。
12、在数字控制器故障的情况下可以应用的基本安全状态是“自由轮”模式。在这种情况下,所有功率级开关都被迫使处于断开状态。结果,电机线圈被设置为开路配置,如图7中所示。
13、如图8中说明的,自由轮配置的边缘效应是在电机线圈引脚上感应出电磁电压。根据电机速度,要考虑三种情形:
14、·在低电机速度下,该电压低于电池电压,因此保护二极管(1301)被阻断。没有电流向后注入电池。该情形是安全的。
15、·超过第一速度阈值时,vemf电压超过vbat电压。然后,保护二极管变得导通。电流向后注入电池。电池能够处理一定量的充电电流。因此,该情形是安全的,直到反向电流低于电池的最大额定充电电流。
16、·超过第二速度阈值时,向后注入的电流超过电池所支持的最大值。该情形是危险的,必须避免。
17、图8图示了本发明应对的高速下的自由轮问题。
18、·0401:电机线圈电压超过电池电压的第一速度阈值。
19、·0402:反向注入电流超过电池额定值的第二速度阈值。
20、如以上证实的,自由轮配置在高速下不是安全状态。在该情形下,可以使用另一种安全状态:主动短路配置。在该配置中,诸如以下地控制功率级开关:
21、·vbat侧的所有开关都是“断开”的
22、·地侧的所有开关都是“闭合”的图9图示了处于“主动短路”安全状态配置的emotor系统。
23、·1501:所有电机线圈都被短路,因此电磁感应电压为零。因此,没有向电池注入反向电流。
24、尽管该配置对于电池是安全的,但它具有一些必须考虑的不良边缘效应:
25、·由于流过线圈的短路电流,导致电机强烈晃动。在没有车辆驾驶员动作的情况下的电机制动可能是危险的。在高速下这可能是可接受的,但在低速下是不可接受的。
26、·制动在系统中引起热能耗散。这要被尽可能地最小化。
27、以上例证了,对emotor安全状态的管理必须比迄今为止提供的管理更智能。
28、本发明的目的
29、本发明的目的是提供一种emotor安全状态的智能管理,该智能管理:
30、·高速下选择“主动短路”安全状态
31、·尽可能使用“自由轮”
技术实现思路
1、本发明的第一方面描述了一种具有增强的安全性的基于电机(电动机)的系统,该系统包括:(1)电机(电动机);(2)为控制所述电机(电动机)而提供的电机(电动机)功率控制装置;(3)适于针对所述电机(电动机)功率控制装置提供(生成)第一控制信号的第一(数字)控制单元;(4)为向所述电机(电动机)功率控制装置供电而提供的(电)功率储存装置;(5)适于确定与所述(电)功率储存装置和所述电机(电动机)功率控制装置之间的功率交换相关的信息(110)的第一传感器;(6)具有增强的安全性的第二控制单元,其中,所述第二控制单元适于在第一模式下将从所述第一(数字)控制单元接收的所述第一控制信号传向所述电机(电动机)功率控制装置,并且适于在第二模式下提供(生成)用于所述电机(电动机)功率控制装置的第二控制信号(代替所述第一控制信号),并且其中,所述第二控制单元输入并利用所述信息。
2、本发明的第二方面描述了一种适于作为具有增强的安全性的基于电机(电动机)的系统的一部分的、为增强的安全性而提供的第二控制单元,该第二控制单元包括:(1)电机(电动机);(2)为控制所述电机(电动机)而提供的电机(电动机)功率控制装置;(3)适于针对所述电机(电动机)功率控制装置提供(生成)第一控制信号的第一(数字)控制单元;(4)为向所述电机(电动机)功率控制装置供电而提供的(电)功率储存装置;(5)适于确定与所述(电)功率储存装置和所述电机(电动机)功率控制装置之间的功率交换相关的信息的第一传感器;所述第二控制单元适于在第一模式下将从所述第一(数字)控制单元接收的所述第一控制信号传向所述电机(电动机)功率控制装置,并且适于在第二模式下提供(生成)用于所述电机(电动机)功率控制装置的第二控制信号(代替所述第一控制信号),并且其中,所述第二控制单元输入并利用所述信息。
技术特征:
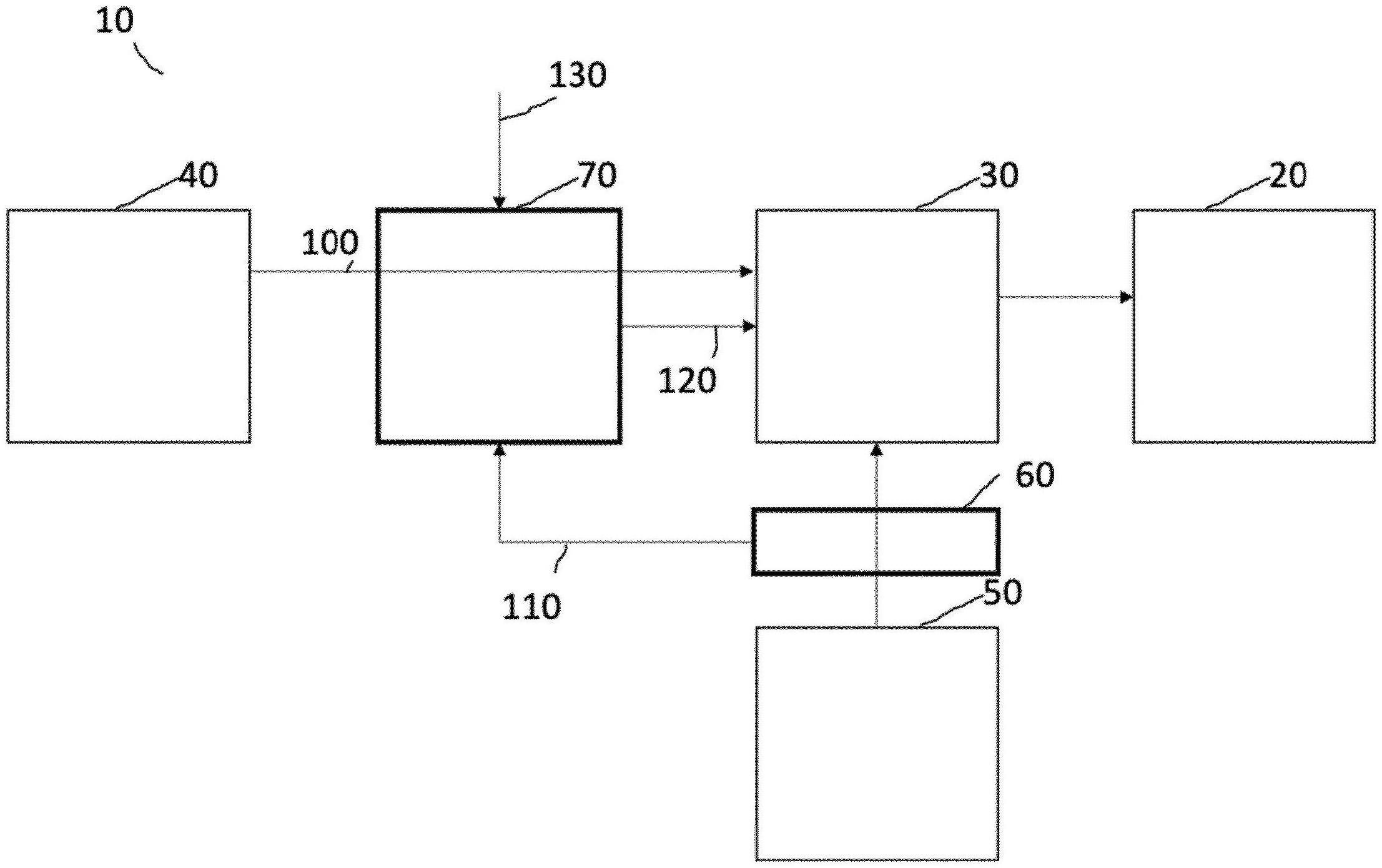
1.一种基于电机(电动机)的系统(10),包括:(1)电机(电动机)(20);(2)为控制所述电机(电动机)(20)而提供的电机(电动机)功率控制装置(30);(3)适于针对所述电机(电动机)功率控制装置(30)提供第一控制(100)信号的第一(数字)控制单元(40);(4)为向所述电机(电动机)功率控制装置(30)供电而提供的(电)功率储存装置(50);(5)适于确定与所述(电)功率储存装置(50)和所述电机(电动机)功率控制装置(30)之间的功率交换相关的信息(110)的第一传感器(60);(6)第二控制单元(70),其中,所述第二控制单元(70)适于在第一模式(200)下将从所述第一(数字)控制单元(40)接收的所述第一控制信号(100)传向所述电机(电动机)功率控制装置(30),并且适于在第二模式(210)下提供用于所述电机(电动机)功率控制装置(30)的第二控制信号(120),并且其中,所述第二控制单元(70)输入并利用所述信息(110)。
2.根据权利要求1所述的基于电机(电动机)的系统(10),其中,所述第二控制单元(70)利用所述信息(110)针对所述电机(电动机)功率控制装置(30)提供第二控制信号。
3.根据权利要求1或2所述的基于电机(电动机)的系统(10),其中,所述第二控制单元(70)输入故障信号(130)并且利用所述故障信号(130)在所述模式之间切换。
4.根据权利要求3或4所述的基于电机(电动机)的系统(10),其中,所述第二控制单元(70)在接收到所述故障信号(130)后,提供用于防止从所述电机(电动机)到所述(电)功率储存装置(50)的大量功率交换的第二控制信号(120),优选地,在必要时,第二控制信号(120)在所述电机(电动机)上引起暂时的制动效应。
5.根据权利要求3或4所述的基于电机(电动机)的系统(10),其中,所述第二控制单元(70)在接收到所述故障信号(130)后,根据监视所述信息(110),优选地在预定时间之后重新评估所述信息(110),提供第二控制信号(120)以将所述电机(电动机)置于自由轮模式(220)或主动短路模式(230)。
6.根据权利要求3、4或5所述的基于电机(电动机)的系统(10),其中,所述第二控制单元(70)在接收到所述故障信号(130)后,(a)提供第二控制信号(120)以将所述电机(电动机)置于自由轮模式(220);此后监视所述信息(110),并且在超过阈值(140)后,(b)所述第二控制单元(70)提供第二控制信号(120),以将所述电机(电动机)置于主动短路模式(230);并且此后,在预定时间(150)之后,返回到(a)。
7.根据权利要求6所述的基于电机(电动机)的系统(10),其中,所述第二控制单元(70)适于输入所述阈值(140)。
8.根据权利要求6或7所述的基于电机(电动机)的系统(10),其中,所述第二控制单元(70)适于输入所述预定时间(150)。
9.根据前述权利要求1至8中任一项所述的基于电机(电动机)的系统(10),其中,所述第一传感器(60)是电流传感器。
10.根据前述权利要求1至8中任一项所述的基于电机(电动机)的系统(10),其中,所述第一传感器(60)是温度传感器。
11.根据前述权利要求中任一项所述的基于电机(电动机)的系统(10),其中,所述(电机)电动机功率控制装置(30)包括多个成对串联连接的开关。
12.根据前述权利要求中任一项所述的基于电机(电动机)的系统(10),其中,所述第一(数字)控制单元(40)是硬件可编程单元,优选地是可编程逻辑矩阵。
13.根据前述权利要求中任一项所述的基于电机(电动机)的系统(10),还包括适于确定速度信息(160)的(运动)传感器(80),其中,所述第一控制单元(40)利用所述速度信息(160)。
14.根据权利要求6所述的基于电机(电动机)的系统(10),其中,所述第二控制单元(70)包括存储装置(90),以存储所述阈值(140)和/或所述预定时间(150)。
15.根据权利要求6所述的基于电机(电动机)的系统(10),其中,所述第二控制单元(70)包括模数转换器(400),以将所述信息(110)数字化。
16.根据权利要求6所述的基于电机(电动机)的系统(10),其中,所述第二控制单元(70)包括用于基于所述故障信号(130)和/或所述比较器(410)的结果(170)在所述模式(200、210、220)之间进行选择的一个或多个选择器(420)。
17.根据权利要求6所述的基于电机(电动机)的系统(10),其中,所述第二控制单元(70)包括用于在所述模式(200、210、220)之间改变的实现状态机的控制逻辑单元(430)。
18.一种适于作为基于电机(电动机)的系统(10)的一部分的第二控制单元(70),包括:(1)电机(电动机)(20);(2)为控制所述电机(电动机)(20)而提供的电机(电动机)功率控制装置(30);(3)适于针对所述电机(电动机)功率控制装置(30)提供第一控制(100)信号的第一(数字)控制单元(40);(4)为向所述电机(电动机)功率控制装置(30)供电而提供的(电)功率储存装置(50);(5)适于确定与所述(电)功率储存装置(50)和所述电机(电动机)功率控制装置(30)之间的功率交换相关的信息(110)的第一传感器(60);所述第二控制单元(70)适于在第一模式(200)下将从所述第一(数字)控制单元(40)接收的所述第一控制信号(100)传向所述电机(电动机)功率控制装置(30),并且适于在第二模式(210)下提供用于所述电机(电动机)功率控制装置(30)的第二控制信号(120),并且其中,所述第二控制单元(70)输入并利用所述信息(110)。
19.根据权利要求18所述的第二控制单元(70),适于利用所述信息(110)针对所述电机(电动机)功率控制装置(30)提供第二控制信号。
20.根据权利要求18或19所述的第二控制单元(70),适于输入故障信号(130)并且利用所述故障信号(130)在所述模式之间切换。
21.根据权利要求20所述的第二控制单元(70),其中,所述第二控制单元(70)在接收到所述故障信号(130)后,提供用于防止从所述电机(电动机)到所述(电)功率储存装置(50)的大量功率交换的第二控制信号(120),优选地,在必要时,第二控制信号(120)在电机(电动机)上引起暂时的制动效应。
22.根据权利要求20所述的第二控制单元(70),其中,所述第二控制单元(70)在接收到所述故障信号(130)后,根据监视所述信息(110),优选地在预定时间之后重新评估所述信息(110),提供第二控制信号(120)以将所述电机(电动机)置于自由轮模式(220)或主动短路模式(230)。
23.根据权利要求20所述的第二控制单元(70),其中,所述第二控制单元(70)在接收到所述故障信号(130)后,(a)提供第二控制信号(120)以将所述电机(电动机)置于自由轮模式(220);此后监视所述信息(110),并且在超过阈值(140)后,(b)所述第二控制单元(70)提供第二控制信号(120),以将所述电机(电动机)置于主动短路模式(230);并且此后,在预定时间(150)之后,返回到(a)。
24.根据权利要求23所述的第二控制单元(70),适于输入所述阈值(140)。
25.根据权利要求22或23所述的第二控制单元(70),适于输入所述预定时间(150)。
26.根据权利要求23所述的第二控制单元(70),包括存储装置(90),以存储所述阈值(140)和/或所述预定时间(150)。
27.根据权利要求23所述的第二控制单元(70),包括模数转换器(400),以将所述信息(110)数字化。
28.根据权利要求23所述的第二控制单元(70),包括用于基于所述故障信号(130)和/或比较器(410)的结果(170)在所述模式(200、210、220)之间进行选择的一个或多个选择器(420)。
29.根据权利要求23所述的第二控制单元(70),包括用于在所述模式(200、210、220)之间改变的实现状态机的控制逻辑单元(430)。
30.根据权利要求23所述的第二控制单元(70),被设计为具有比电机控制的死机时间短的反应时间。
技术总结
本发明涉及车辆电动机数字控制的应用领域,并且更具体地,涉及与此相关联的功能安全机构领域。
技术研发人员:B·萨尔,A·莱布伦
受保护的技术使用者:芯力能简易股份公司
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!