一种相机的音圈马达的驱动装置和方法与流程
【】本发明涉及音圈马达(vcm:voice coil motor),尤其涉及一种相机的音圈马达的驱动装置和方法。
背景技术
0、
背景技术:
1、相机在移动设备,比如智能手机,平板电脑等,中已经非常广泛。所述相机的镜头通常是由音圈马达进行驱动的,移动镜头而使位置变化,从而执行对特定被摄体对焦的自动对焦。如何实现手机相机的快速稳定,是音圈马达驱动设计需要解决的问题。
2、所述音圈马达的工作原理通常是给音圈提供一定的驱动电流,使得动子与定子之间运动与驱动电流的值成正比的距离,在所述驱动电流被撤销后,由于动子和定子之间的弹簧的弹力使得动子和定子回复初始的位置,所述镜头放置于所述动子上。取决于实现方案,所述音圈可以被设置为定子。
3、在驱动所述音圈马达时,若直接给予目标驱动电流,动子会产生固定周期的类似于正弦信号的振动(振铃现象),在有阻尼的情况下,振动的幅值会逐渐衰减。然而,这依然会导致调节时间过长。如图3所示的,其为直接给予目标驱动电流后音圈马达位置响应的曲线,补偿前音圈马达的调节时间(±5%误差范围)为3000ms左右。
4、为了抑制这种振动,理论上可以在驱动电流中加上反向的补偿信号。因此,亟需提出一种新的技术方案来解决上述问题。
技术实现思路
0、
技术实现要素:
1、本发明的目的之一在于提供一种相机的音圈马达的驱动装置和方法,其通过对控制信号进行补偿调整,音圈马达的调节时间(±5%误差范围)被大幅缩短,并且可以提高控制算法的可调性和降低算法复杂度。
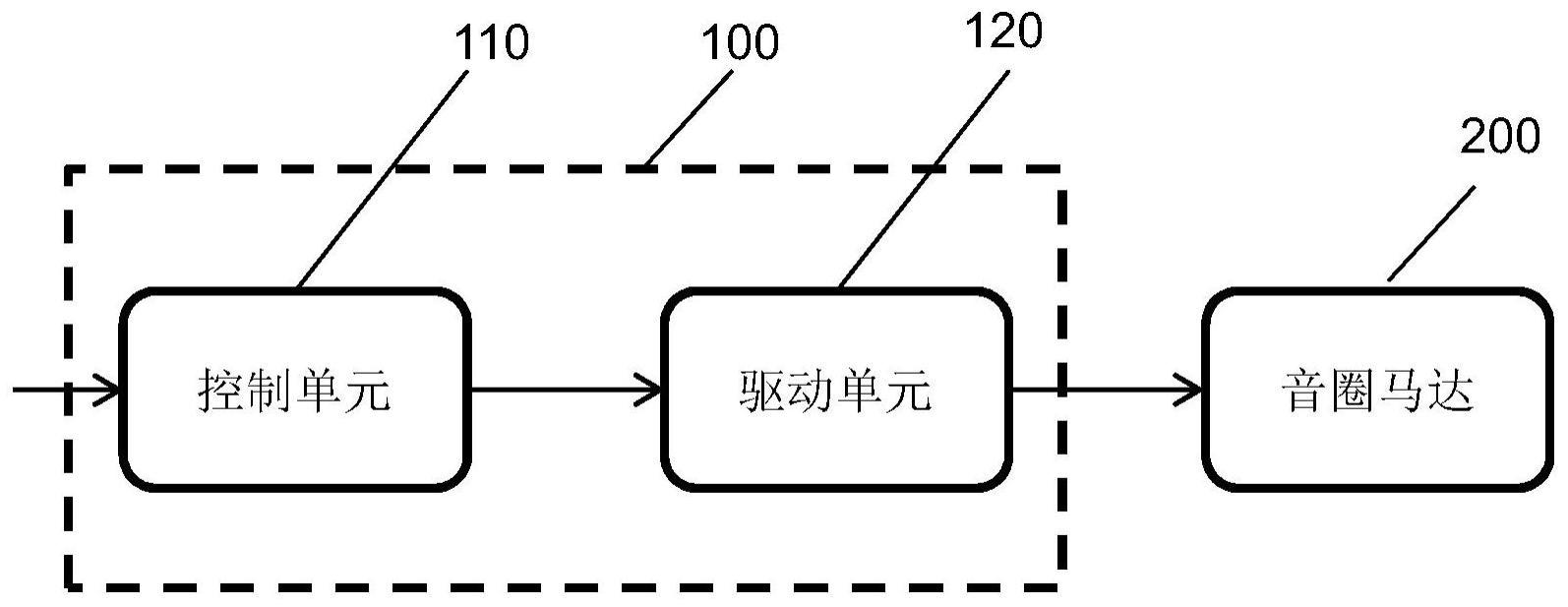
2、根据本发明的一个方面,本发明提供一种相机的音圈马达的驱动装置,其包括:控制单元,其内存储有时长参数t1、t2和t3,在驱动所述音圈马达时,其根据来自相机的指令中的目标值、存储的时长参数t1、t2和t3计算得到第一段曲线控制信号、第二段曲线控制信号、第三段直线控制信号和第四段直线控制信号,第一段曲线控制信号、第二段曲线控制信号、第三段直线控制信号和第四段直线控制信号组成连续的控制信号,第四段直线控制信号后,所述控制信号为所述目标值;驱动单元,基于所述控制单元输出的控制信号输出驱动信号驱动所述音圈马达。
3、根据本发明的另一个方面,本发明提供一种相机的音圈马达的驱动方法,其包括:根据来自相机的指令中的目标值、存储的时长参数t1、t2和t3计算得到第一段曲线控制信号、第二段曲线控制信号、第三段直线控制信号和第四段直线控制信号,第一段曲线控制信号、第二段曲线控制信号、第三段直线控制信号和第四段直线控制信号组成连续的控制信号,第四段直线控制信号后,所述控制信号为所述目标值;基于所述控制信号输出驱动信号驱动所述音圈马达。
4、与现有技术相比,本发明通过对控制信号进行补偿调整,所述控制信号包括第一段曲线控制信号、第二段曲线控制信号、第三段直线控制信号和第四段直线控制信号,这样音圈马达的调节时间(±5%误差范围)被大幅缩短,并且可以提高控制算法的可调性和降低算法复杂度。
技术特征:
1.一种相机的音圈马达的驱动装置,其特征在于,其包括:
2.根据权利要求1所述的驱动装置,其特征在于,所述控制单元根据如下公式计算第一段曲线控制信号a1:
3.根据权利要求2所述的驱动装置,其特征在于,所述控制单元根据如下公式计算第二段曲线控制信号a2:
4.根据权利要求3所述的驱动装置,其特征在于,第三段直线控制信号a3为:
5.根据权利要求4所述的驱动装置,其特征在于,在t≥t1+t2+t3+t4时,所述控制信号的取值为来自相机的指令中的目标值at。
6.一种相机的音圈马达的驱动方法,其特征在于,其包括:
7.根据权利要求6所述的驱动方法,其特征在于,根据如下公式计算第一段曲线控制信号a1:
8.根据权利要求7所述的驱动方法,其特征在于,第三段直线控制信号a3为:a3=at,t∈[t1+t2,t1+t2+t3),
9.根据权利要求8所述的驱动方法,其特征在于,在t≥t1+t2+t3+t4时,所述控制信号的取值为来自相机的指令中的目标值at。
技术总结
本发明提供一种相机的音圈马达的驱动装置和方法,所述驱动装置包括:控制单元,其内存储有时长参数T1、T2和T3,在驱动所述音圈马达时,其根据来自相机的指令中的目标值、存储的时长参数T1、T2和T3计算得到第一段曲线控制信号、第二段曲线控制信号、第三段直线控制信号和第四段直线控制信号,第一段曲线控制信号、第二段曲线控制信号、第三段直线控制信号和第四段直线控制信号组成连续的控制信号,第四段直线控制信号后,所述控制信号为所述目标值。通过对所述目标值进行补偿调整,音圈马达的调节时间(±5%误差范围)缩小到7ms左右,调节时间有了大幅度的减小。
技术研发人员:邓孝逸,闫国普,查旻罡,蒋乐跃
受保护的技术使用者:美新半导体(无锡)有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!