基于干扰观测器的PMSM伺服系统电流环反电动势影响补偿方法与流程
本发明属于电机领域,尤其涉及一种基于干扰观测器的pmsm伺服系统电流环反电动势影响补偿方法。
背景技术:
1、pmsm永磁同步电机的转子为永磁体,通过pwm逆变器在定子绕组产生的旋转磁场驱动定子旋转;定子绕组在旋转磁场中切割磁力线产生的感应电动势(即反电动势)作用于定子绕组,对电流环产生耦合影响,其影响值以电机轴转速ω与反电动势系数ke的乘积计算,如图1所示;这种耦合产生的非线性对电流环控制是不利的。在采用pmsm永磁同步电机的机床进给轴伺服系统电流环pi控制器设计中,常基于“伺服系统的机械惯性比电枢绕组回路的电磁惯性大得多,即电流响应比转速响应要快”的前提,忽略反电动势对电流环的影响,即取图1中的ke=0,在一定程度上满足了工程实际的需要。
2、随着伺服电机及运动控制技术的快速发展,表征伺服电机动态性能的关键指标“电气时间常数te、机械时间常数tm、机电时间常数tme”也发生了很大变化,传统假设条件te<<tm也不再满足,甚至会发生相反的状况,反电动势对电流环的影响无法忽略。以某机床进给轴机电仿真模型为例,忽略负载tl作用,且假设电机轴及负载可视为单惯量系统,则电流环的伺服电机、电机轴及负载惯量系统、反电动势的回路如图2所示。
3、若忽略反电动势的影响,即图2中的反电动势系数ke=0,以某具体设计选型为例,其余各参数值为:定子电阻r=0.04ω、定子电感l=1.1mh、力矩系数kc=1.61nm/a、总惯量ja=0.0581kgm2,te=27.5ms,tm=1.1ms,te>tm,当输入电压uq为单位阶跃电压时,输出伺服电机电流iq的响应曲线如图3所示,
4、电机轴转速ω的响应曲线如图4所示,
5、从图3~4看到,在电压阶跃到一个恒定值的情况下,电流响应也稳定到一个数值,相应地,电机输出扭矩也稳定到一个数值,即电机轴转速应线性增加。
6、若不忽略反电动势的影响,即ke=0.9836v/(rad/s),相同的单位阶跃电压输入下,输出伺服电机电流iq的响应曲线如图5所示,
7、电机轴转速的响应曲线如图6所示,
8、从图5~6看到,反电动势影响是一个负反馈,在电压阶跃到一个恒定值的情况下,电机轴转速经过振荡后稳定到与输入电压阶跃幅度相同的数值,电流值经过振荡后稳定到0。这表明反电动势负反馈对电流环的影响很大,产生了“闭环效应”,不能忽略。
9、不采取措施消除此“闭环效应”的影响,pmsm伺服系统电流环将无法正常工作。因此,需要寻求一种新的控制方法,解决这一问题。
技术实现思路
1、为了克服上述现有技术的不足之处,本发明提供一种基于干扰观测器的pmsm伺服系统电流环反电动势影响补偿方法,消除反电动势对伺服系统电流环的负反馈“闭环效应”影响,使电机绕组电流实际值iq与电机轴转速ω的变化率保持线性关系,且电流设定值iqref在电流环带宽范围内与电流实际值iq一致,使得伺服系统电流环控制正常运行。
2、为实现上述目的,本发明采用如下技术方案:一种基于干扰观测器的pmsm伺服系统电流环反电动势影响补偿方法,包括以下步骤:
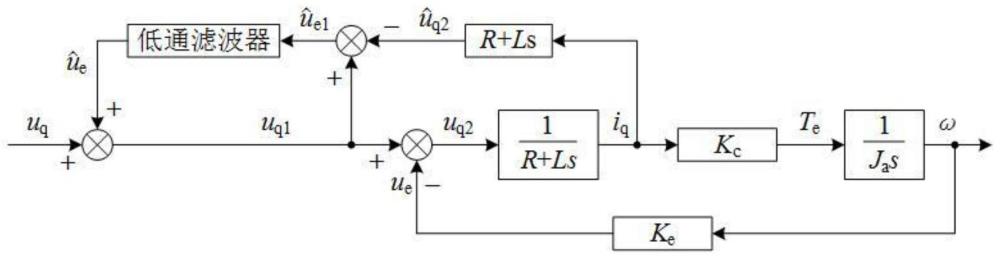
3、1、在pmsm伺服系统电流环中接入干扰观测器,该干扰观测器包括扰动观测模块r+ls、比较单元和低通滤波器;
4、2、采用id=0控制模式,电流iq经扰动观测模块r+ls变换后,得到电压uq2的观测值
5、3、将uq1与相减得到反电动势ue的观测值
6、4、通过低通滤波器对反电动势ue的观测值进行滤波,得到反电动势ue(即伺服电机q轴电压uq扰动)的观测值
7、5、经过滤波后的扰动观测值以正反馈的形式与伺服电机q轴电压uq相加,消除了反电动势ue的扰动影响,使基于id=0控制模式的pmsm伺服系统电流环正常运行。
8、在上述技术方案中,适用于单惯量系统时,此时电机轴惯量jm和负载惯量jl组成一个惯量ja,ja=jm+jl,te-ω传递函数为
9、在上述技术方案中,适用于包含阻尼b、刚度c的双惯量系统,双惯量为电机轴惯量jm和负载惯量jl,双惯量系统的te-ω传递函数为
10、在上述技术方案中,增加干扰观测器的电流环,可等效为无反电动势影响的电流环,由于采用低通滤波器对观测值进行滤波,增加干扰观测器中电流环的变成为无反电动势影响的等效电流环中的伺服电机传递函数先计算总惯量ja,再通过前述uq阶跃响应分析来计算l1、r1参数值。
11、本发明的有益效果是:消除反电动势对伺服系统电流环的负反馈“闭环效应”影响,使电机绕组电流实际值iq与电机轴转速ω的变化率保持线性关系,,且电流设定值iqref在电流环带宽范围内与电流实际值iq一致,使得伺服系统电流环控制正常运行。
技术特征:
1.一种基于干扰观测器的pmsm伺服系统电流环反电动势影响补偿方法,其特征是:包括以下步骤:
2.根据权利要求1所述的基于干扰观测器的pmsm伺服系统电流环反电动势影响补偿方法,其特征是:适用于单惯量系统时,此时电机轴惯量jm和负载惯量jl组成一个惯量ja,ja=jm+jl,te-ω传递函数为
3.根据权利要求1所述的基于干扰观测器的pmsm伺服系统电流环反电动势影响补偿方法,其特征是:适用于包含阻尼b、刚度c的双惯量系统,双惯量为电机轴惯量jm和负载惯量jl,双惯量系统的te-ω传递函数为
4.根据权利要求1所述的基于干扰观测器的pmsm伺服系统电流环反电动势影响补偿方法,其特征是:增加干扰观测器的电流环,可等效为无反电动势影响的电流环,由于采用低通滤波器对观测值进行滤波,增加干扰观测器中电流环的变成为无反电动势影响的等效电流环中的伺服电机传递函数先计算总惯量ja,再通过前述uq阶跃响应分析来计算l1、r1参数值。
技术总结
本发明公开了一种基于干扰观测器的PMSM伺服系统电流环反电动势影响补偿方法,包括以下步骤:在PMSM伺服系统电流环中接入干扰观测器,该干扰观测器包括扰动观测模块R+Ls、比较单元和低通滤波器,采用i<subgt;d</subgt;=0控制模式,电流i<subgt;q</subgt;经扰动观测模块R+Ls变换后,得到电压u<subgt;q2</subgt;的观测值将u<subgt;q1</subgt;与相减得到反电动势u<subgt;e</subgt;的观测值消除反电动势对伺服系统电流环的负反馈“闭环效应”影响,使电机绕组电流实际值i<subgt;q</subgt;与电机轴转速ω的变化率保持线性关系,且电流设定值i<subgt;qref</subgt;在电流环带宽范围内与电流实际值i<subgt;q</subgt;一致,使得伺服系统电流环控制正常运行。
技术研发人员:赵明,陈昳,吕洪杰,张圣平,薛敬宇,龚明海
受保护的技术使用者:武汉重型机床集团有限公司
技术研发日:
技术公布日:2024/2/8
- 还没有人留言评论。精彩留言会获得点赞!