智能烹饪设备的控制方法、控制系统以及智能烹饪设备与流程
本申请涉及人工智能,尤其涉及一种智能烹饪设备的控制方法、控制系统以及智能烹饪设备。
背景技术:
1、智能烹饪设备能够利用内置的搅拌组件自动搅拌食材,无需人工手动搅拌食材,提高了烹饪智能化程度。目前,搅拌组件在结束搅拌任务之后,停止在任意位置上。在搅拌组件设置在智能烹饪设备的锅盖下方的场景下,在开盖过程中搅拌组件上可能会附着食材,附着的食材可能会影响搅拌组件的搅拌功能,最终影响智能烹饪设备的工作性能。在智能烹饪设备具有投料组件的场景下,若搅拌组件停止在投料口下,则影响投料效果,最终也会影响智能烹饪设备的工作性能。为此,很有必要控制搅拌组件的停止位置。
技术实现思路
1、本申请的多个方面提供一种智能烹饪设备的控制方法、控制系统以及智能烹饪设备,用以提高搅拌组件的复位准确度,进而保证智能烹饪设备的工作性能。
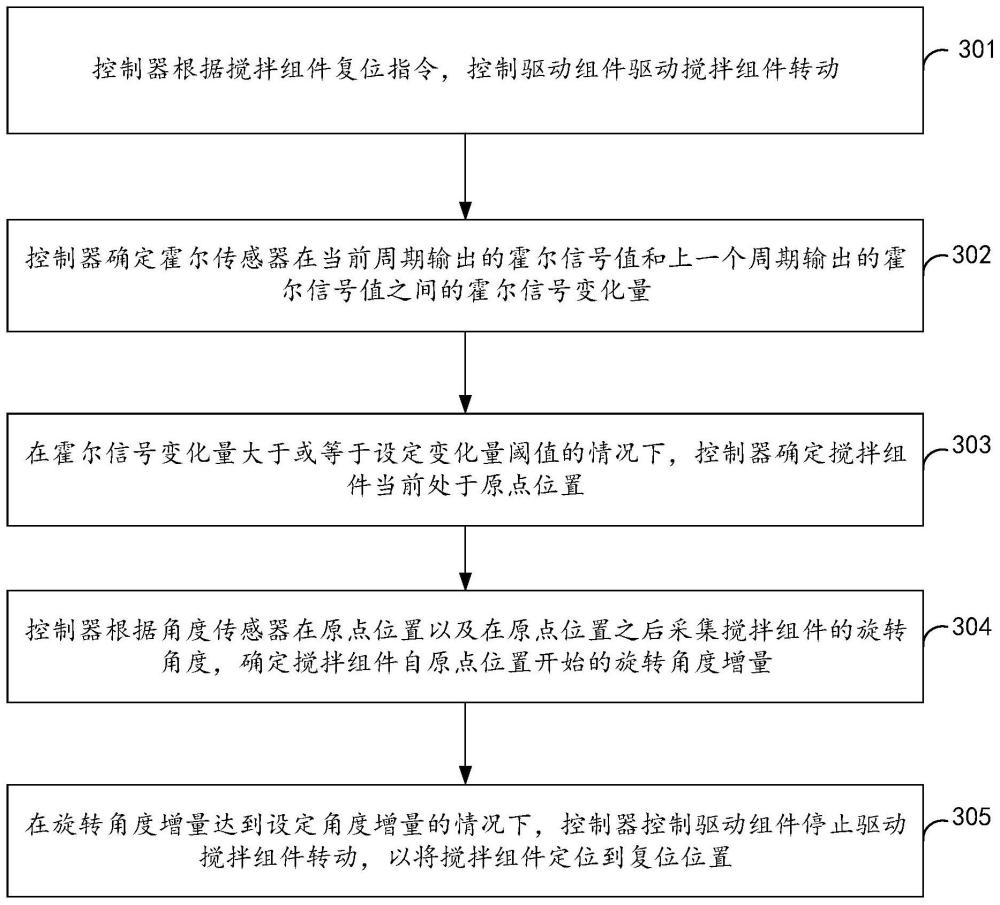
2、本申请实施例提供一种智能烹饪设备的控制方法,智能烹饪设备包括搅拌组件、控制器、驱动组件、角度传感器、霍尔传感器和磁性部件,驱动组件和搅拌组件转动连接;控制器分别与驱动组件、角度传感器和霍尔元件通信连接;角度传感器用于检测搅拌组件的旋转角度;霍尔传感器用于周期性感应搅拌组件转动所引起的磁场变化产生相应的霍尔信号值;该方法包括:控制器根据搅拌组件复位指令,控制驱动组件驱动搅拌组件转动;控制器确定霍尔传感器在当前周期输出的霍尔信号值和上一个周期输出的霍尔信号值之间的霍尔信号变化量;在霍尔信号变化量大于或等于设定变化量阈值的情况下,控制器确定搅拌组件当前处于原点位置;控制器根据角度传感器在原点位置以及在原点位置之后采集搅拌组件的旋转角度,确定搅拌组件自原点位置开始的旋转角度增量;在旋转角度增量达到设定角度增量的情况下,控制器控制驱动组件停止驱动搅拌组件转动,以将搅拌组件定位到复位位置。
3、本申请实施例还提供一种控制系统,应用于智能烹饪设备,智能烹饪设备包括搅拌组件,控制系统包括控制器、驱动组件、角度传感器、霍尔传感器和磁性部件;驱动组件和搅拌组件转动连接;控制器分别与驱动组件、角度传感器和霍尔元件通信连接;角度传感器用于检测搅拌组件的旋转角度;霍尔传感器用于周期性感应搅拌组件转动所引起的磁场变化产生相应的霍尔信号值;控制器,用于根据搅拌组件复位指令,控制驱动组件驱动搅拌组件转动;确定霍尔传感器在当前周期输出的霍尔信号值和上一个周期输出的霍尔信号值之间的霍尔信号变化量;在霍尔信号变化量大于或等于设定变化量阈值的情况下,确定搅拌组件当前处于原点位置;根据角度传感器在原点位置以及在原点位置之后采集搅拌组件的旋转角度,确定搅拌组件自原点位置开始的旋转角度增量;在旋转角度增量达到设定角度增量的情况下,控制驱动组件停止驱动搅拌组件转动,以将搅拌组件定位到复位位置。
4、本申请实施例还提供一种智能烹饪设备,智能烹饪设备包括搅拌组件、控制器、驱动组件、角度传感器、霍尔传感器和磁性部件,驱动组件和搅拌组件转动连接;控制器分别与驱动组件、角度传感器和霍尔元件通信连接;角度传感器用于检测搅拌组件的旋转角度;霍尔传感器用于周期性感应搅拌组件转动所引起的磁场变化产生相应的霍尔信号值;存储器,用于存储计算机程序;控制器耦合至存储器,用于执行计算机程序以用于执行智能烹饪设备的控制方法中的步骤。
5、本申请实施例提供一种智能烹饪设备的控制方法、控制系统以及智能烹饪设备,在本申请实施例中,在智能烹饪设备中增设控制器、驱动组件、角度传感器、霍尔传感器等和磁性部件,通过控制器、驱动组件、角度传感器、霍尔传感器和磁性部件相互配合,可以首先准确将搅拌组件定位到原点位置,接着从原点位置开始通过角度传感器采集到的旋转角度增量,准确地将搅拌组件定位到复位位置,进而保证智能烹饪设备的工作性能。
技术特征:
1.一种智能烹饪设备的控制方法,其特征在于,所述智能烹饪设备包括搅拌组件、控制器、驱动组件、角度传感器、霍尔传感器和磁性部件,所述驱动组件和所述搅拌组件转动连接;所述控制器分别与所述驱动组件、所述角度传感器和所述霍尔元件通信连接;所述角度传感器用于检测所述搅拌组件的旋转角度;所述霍尔传感器用于周期性感应所述搅拌组件转动所引起的磁场变化产生相应的霍尔信号值;所述方法包括:
2.根据权利要求1所述的方法,其特征在于,还包括:
3.根据权利要求2所述的方法,其特征在于,在触发所述搅拌组件复位指令之前还包括:
4.根据权利要求3所述的方法,其特征在于,还包括:
5.根据权利要求4所述的方法,其特征在于,在控制所述驱动组件继续驱动所述搅拌组件转动直至所述当前剩余搅拌时长小于或等于所述目标时长之前,还包括:
6.根据权利要求5所述的方法,其特征在于,还包括:
7.根据权利要求1所述的方法,其特征在于,还包括:
8.根据权利要求1所述的方法,其特征在于,还包括:
9.根据权利要求1所述的方法,其特征在于,在所述控制器根据搅拌组件复位指令,控制所述驱动组件驱动所述搅拌组件转动之前,所述方法还包括:
10.一种控制系统,应用于智能烹饪设备,所述智能烹饪设备包括搅拌组件,其特征在于,所述控制系统包括控制器、驱动组件、角度传感器、霍尔传感器和磁性部件;所述驱动组件和所述搅拌组件转动连接;所述控制器分别与所述驱动组件、所述角度传感器和所述霍尔元件通信连接;
11.一种智能烹饪设备,其特征在于,所述智能烹饪设备包括搅拌组件、控制器、驱动组件、角度传感器、霍尔传感器和磁性部件,所述驱动组件和所述搅拌组件转动连接;所述控制器分别与所述驱动组件、所述角度传感器和所述霍尔元件通信连接;所述角度传感器用于检测所述搅拌组件的旋转角度;所述霍尔传感器用于周期性感应所述搅拌组件转动所引起的磁场变化产生相应的霍尔信号值;
技术总结
本申请实施例提供一种智能烹饪设备的控制方法、控制系统以及智能烹饪设备,在本申请实施例中,在智能烹饪设备中增设控制器、驱动组件、角度传感器、霍尔传感器和磁性部件,通过控制器、驱动组件、角度传感器、霍尔传感器和磁性部件相互配合,可以首先准确将搅拌组件定位到原点位置,接着从原点位置开始通过角度传感器采集到的旋转角度增量,准确地将搅拌组件定位到复位位置,进而保证智能烹饪设备的工作性能。
技术研发人员:杜恒鹏,蒋洪彬,陈勇,张卫东
受保护的技术使用者:添可智能科技有限公司
技术研发日:
技术公布日:2024/3/12
- 还没有人留言评论。精彩留言会获得点赞!