运行期间在半桥中的功率开关的漏极到源极监控的制作方法
1.本公开涉及功率开关,并且更具体地,涉及用于监控布置在半桥中的功率开关的操作的技术和电路。
背景技术:
2.场效应晶体管(fet)通常用作功率开关以控制向负载的功率输送。fet的示例可以包括但不限于结型场效应晶体管(jfet)、金属氧化物半导体fet(mosfet)、双栅极mosfet、任何其他类型的fet、或它们的任何组合。mosfet的示例可以包括但不限于pmos、nmos、dmos、或任何其他类型的mosfet、或它们的任何组合。mosfet可以由硅、氮化镓、碳化硅或其他材料形成。
3.功率开关通常被驱动电路通过调制控制信号控制,调制控制信号例如是脉宽调制(pwm)、脉冲频率调制(pfm)、脉冲持续时间调制、脉冲密度调制或其他类型的调制控制信号。调制控制信号可以施加到功率开关的栅极,以控制功率开关的通/断切换,从而控制通过功率开关输送到负载的平均电量。功率开关的通/断切换有效地将其功率传输分成离散部分。可以通过快速导通和关断开关来控制馈入负载的电压和/或电流的平均值。与关断周期相比,开关导通的时间越长,提供给负载的总功率就越高。
4.在许多应用中,两个不同的功率开关被配置为高侧和低侧配置,并且两个功率开关的通/断切换是同步的,以便将所需的功率输送到位于高侧和低侧功率开关之间的开关节点。此外,在一些系统中,不同组的高侧和低侧功率开关可用于控制多相电动机的不同相位。
技术实现要素:
5.一般而言,本公开描述了由驱动器电路或系统在控制以半桥配置布置的两个不同功率开关时应用的电路和技术。该电路和技术可以在半桥操作期间监控功率开关,以确保功率开关正常工作,并确保每个功率开关在功率开关导通时不表现出短路。此外,本发明的电路和技术还可以在功率开关关断时执行额外的监控,以确保监控电路装置正常运行。
6.本公开的电路和技术可有助于对功率开关的操作进行安全检查,并且还可有助于在操作期间对电路装置进行自测试以确保监控电路装置正常运行。半桥中的两个功率开关可以互补方式工作,例如以互补方式导通和关断。当高侧功率开关导通时,低侧功率开关关断,反之亦然。此外,当高侧功率开关导通时,高侧比较单元可以监控高侧功率开关的漏极到源极电压以确定是否存在短路。类似地,当低侧功率开关导通时,低侧比较单元可以监控低侧功率开关的漏极到源极电压以确定是否存在短路。
7.根据本公开,高侧比较单元还可以在高侧功率开关关断时监控高侧功率开关的漏极到源极电压,以确定高侧比较单元是否正常工作。此外,低侧比较单元还可以在低侧功率开关关断时监控低侧功率开关的漏极到源极电压,以确定低侧比较单元是否正常工作。这样,本发明的技术和电路可以在半桥运行期间实现对比较器的可靠且连续的自测试。
8.在一个示例中,本公开描述了一种被配置为控制包括高侧功率开关和低侧功率开关的半桥的驱动器电路。驱动电路包括:高侧比较单元,被配置为确定第一漏极到源极电压,其中当高侧功率开关导通时,第一漏极到源极电压与高侧功率开关相关联;低侧比较单元,被配置为确定第二漏极到源极电压,其中当低侧功率开关导通时,第二漏极到源极电压与低侧功率开关相关联。此外,根据本发明,高侧比较单元还被配置为确定第三漏极到源极电压,其中当高侧功率开关关断时,第三漏极到源极电压与高侧功率开关相关联,并且低侧比较单元还被配置为确定第四漏极到源极电压,其中当低侧功率开关关断时,第四漏极到源极电压与低侧功率开关相关联。
9.在另一个示例中,本公开描述了一种系统,包括:控制单元,以及被配置为从控制单元接收控制信号并基于控制信号控制半桥的驱动电路,其中半桥包括高侧功率开关和低侧功率开关。该系统的驱动电路包括:高侧比较单元,被配置为确定第一漏极到源极电压,其中当高侧功率开关导通时,第一漏极到源极电压与高侧功率开关相关联;低侧比较单元,被配置为确定第二漏极到源极电压,其中当低侧功率开关导通时,第二漏极到源极电压与低侧功率开关相关联。高侧比较单元还被配置为确定第三漏极到源极电压,其中当高侧功率开关关断时,第三漏极到源极电压与高侧功率开关相关联,并且低侧比较单元还被配置为确定第四漏极到源极电压,其中当低侧功率开关关断时,第四漏极到源极电压与低侧功率开关相关联。
10.在另一示例中,本公开描述了一种控制包括高侧功率开关和低侧功率开关的半桥的方法。该方法包括:确定第一漏极到源极电压,其中当高侧功率开关导通时,第一漏极到源极电压与高侧功率开关相关联;确定第二漏极到源极电压,其中当低侧功率开关导通时,第二漏极到源极电压与低侧功率开关相关联;确定第三漏极到源极电压,其中当高侧功率开关关断时,第三漏极到源极电压与高侧功率开关相关联;以及确定第四漏极到源极电压,其中当低侧功率开关关断时,第四漏极到源极电压与低侧功率开关相关联。
11.这些和其他示例的细节在附图和以下描述中阐述。从描述和附图以及从权利要求中,其他特征、目的和优点将是显而易见的。
附图说明
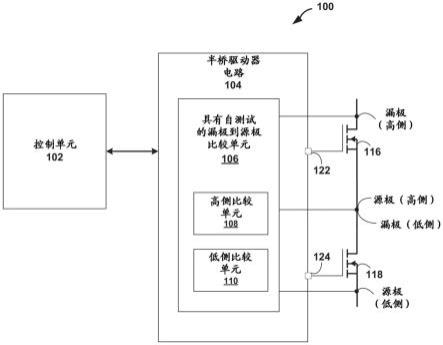
12.图1是根据本公开的包括半桥驱动器电路的系统的框图,该半桥驱动器电路控制半桥配置中的两个功率开关并监控功率开关的操作。
13.图2是控制外部半桥中的两个功率开关的桥驱动器的概念图。
14.图3是示出布置成控制电动机的操作的三个半桥的电路图。
15.图4是示出根据本公开的示例方法的流程图。
具体实施方式
16.本公开描述了由驱动器电路或更大的系统应用的电路和技术,该驱动器电路或更大的系统控制以半桥配置布置的两个不同的功率开关。这些电路和技术可以提供针对功率开关故障的保护,这在各种电路应用中可能是合乎需要的,尤其是在涉及安全问题的环境中,例如用于控制车辆部件的电路。该电路和技术还可以在半桥操作期间促进功率开关的自测试并且无需单独的自测试例程。
17.为了提高安全性和识别潜在的故障状况,经常希望监控功率开关的操作。本公开的电路和技术可以在半桥的操作期间监控功率开关,以确保功率开关正常运行并且确保当功率开关导通时每个功率开关不表现出短路。此外,本发明的电路和技术还可以在功率开关关断时执行额外的监控,以确保监控电路装置正常运行。
18.本公开的电路和技术可以促进对功率开关的操作的安全检查,并且还可以促进在操作期间对电路装置的自测试以确保监控电路装置是可靠的。半桥中的两个不同功率开关可以互补方式操作,例如以互补方式导通和关断。当高侧功率开关导通时,低侧功率开关关断,类似地,当低侧功率开关导通时,高侧功率开关关断。此外,当高侧功率开关导通时,高侧比较单元可以监控高侧功率开关的漏极到源极电压以确定是否存在短路。类似地,当低侧功率开关导通时,低侧比较单元可以监控低侧功率开关的漏极到源极电压以确定是否存在短路。
19.根据本公开,高侧比较单元还可以在高侧功率开关关断时监控高侧功率开关的漏极到源极电压,以确定高侧比较单元是否正常工作。此外,低侧比较单元还可以在低侧功率开关关断时监控低侧功率开关的漏极到源极电压,以确定低侧比较单元是否正常工作。这样,本发明的技术和电路可以在半桥运行期间实现对比较器的可靠且连续的自测试。此外,这些技术可以消除对用于检查比较单元的操作完整性的特殊自测试例程的需要,该例程通常在启动时在半桥操作之前执行。
20.本公开的半桥电路可用于车辆或其他设置中的各种电源电路操作。作为一个示例,半桥可以控制多相电动机的一相,多相电动机例如是在车辆中用于控制动力转向、制动器或其他车辆功能的电机。在多相电动机的示例中,本公开的电路和技术可应用于与电动机的多个相中的每一相相关联的多个不同的半桥电路。
21.图1是示出半桥驱动器电路104的框图,该半桥驱动器电路104被配置为控制以半桥配置布置的高侧功率开关116和低侧功率开关118的操作。特别地,半桥驱动器电路104被配置为以互补方式控制功率开关116、118。半桥驱动器电路104包括第一输出引脚122,其被配置为将信号传送到高侧功率开关116的栅极,以控制高侧功率开关116的通/断状态。此外,半桥驱动器电路104包括第二输出引脚124,其被配置为将信号传送到低侧功率开关118的栅极,以便控制低侧功率开关118的通/断状态。半桥驱动器电路104可以包括能够根据电源产生足够的电压的电路装置。例如,半桥驱动器电路104可以包括一个或多个dc/dc功率转换器、一个或多个电荷泵,或者可能包括一个或多个外部缓冲器集成电路(ic),其可以产生第一和第二输出引脚上所需的电压122、124以控制功率开关116、118的栅极。
22.半桥驱动器电路104可以将脉冲调制信号传送到功率开关116、118的栅极,以便以互补的方式控制功率开关116、118的导通和关断。当高侧功率开关116导通时,低侧功率开关118关断,类似地,当低侧功率开关118导通时,高侧功率开关116关断。在某些情况下,当两个功率开关都在短时间内关断时,每个开关周期中可能会有一个短暂的所谓“死区时间”,这有助于确保两个开关永远不会同时导通。
23.通过输出引脚122和124传送到功率开关116和118的栅极的脉冲调制信号可以包括脉冲宽度调制(pwm)信号、脉冲频率调制(pfm)信号、脉冲持续时间调制信号、脉冲密度调制信号,或用于控制功率开关的其他类型的调制信号。控制单元102可以将控制信号发送到半桥驱动器电路104,半桥驱动器电路定义通过输出引脚122和124传送到功率开关116和
118的栅极的调制信号。例如,控制单元102可以包括微处理器、控制器、专用集成电路(asic)或其他能够将控制信号传送到桥驱动器的电路。功率开关116、118的源极和漏极例如在图1中被标记出。高侧功率开关116的源极对应于低侧功率开关118的漏极,因此,在一些示例中,半桥驱动器104可以将公共引脚用于该公共节点。
24.如图1所示,半桥驱动器电路104包括具有自测试能力的漏极到源极比较单元106。更具体地,半桥驱动器电路104包括高侧比较单元108和低侧比较单元110,它们各自包括一个或多个比较器、模数转换器、或能够比较两个不同电压的其他电路。高侧比较单元108被配置为确定第一漏极到源极电压,其中当高侧功率开关116导通时,第一漏极到源极电压与高侧功率开关116相关联。类似地,低侧比较单元110被配置为确定第二漏极到源极电压,其中当低侧功率开关118导通时,第二漏极到源极电压与低侧功率开关118相关联。这些在开关导通时的比较可用于识别功率开关116、118之一中的潜在短路,在这种情况下,可以将故障信号发送到控制单元102。在这种情况下,由于功率开关116、118之一中的故障,控制单元102可以禁用半桥电路104或以其他方式限制半桥电路104的操作。
25.根据本公开,用于在高侧功率开关116导通时用于测试高侧功率开关116的相同高侧比较单元108也可以在高侧功率开关116关断时用于自测试高侧比较单元108。此外,当低侧功率开关118导通时用于测试低侧功率开关118的相同低侧比较单元110也可以在低侧功率开关118关断时用于自测试低侧比较单元110。因此,高侧比较单元108还被配置为确定第三漏极到源极电压,其中当高侧功率开关116关断时,第三漏极到源极电压与高侧功率开关116相关联,并且低侧比较单元110还被配置为确定第四漏极到源极电压,其中当低侧功率开关118关断时,第四漏极到源极电压与低侧功率开关118相关联。
26.高侧功率开关116可以类似于低侧功率开关118,因此,在许多情况下,类似的阈值可用于监控两个开关。因此,当高侧功率开关116导通时用于监控高侧功率开关116的第一漏源阈值可以等于当低侧功率开关118导通时用于监控低侧功率开关118的第二漏源阈值。类似地,当高侧功率开关116关断时用于高侧比较单元108的自测的第三漏极到源极阈值可以等于当低侧功率开关118关断时用于低侧比较单元110的自测的第四漏极到源极阈值。在一些示例中,第一和第二漏源阈值可以不同于第三和第四漏源阈值,因为第一和第二阈值用于监控处于导通状态的功率开关,并且第三和第四阈值是在相应的功率开关处于关断状态时用于比较器的自测监控。
27.高侧比较单元108和低侧比较单元110使用的阈值可以针对不同的功率开关应用进行配置,使得半桥驱动器电路104可以与不同类型或不同额定值的功率开关一起使用。作为一个示例,导通状态可能期望极小的漏极到源极电压,例如小于100-300mv。关断状态可能预期巨大的漏源电压,例如大于600mv,例如1.5v。作为一个示例,可以定义阈值,以便确认给定功率开关(没有短路)的导通状态通过低于300mv的漏极到源极电压,并且在给定功率开关处于关断状态的情况下,比较器的操作由大于600mv的漏极到源极电压确认。也可以使用其他阈值。还可以对每个比较使用相同的阈值、例如300mv,由此,低于300mv的漏极到源极电压确认为导通状态,大于300mv的漏极到源极电压确认为关断状态。
28.在一些示例中,半桥驱动器电路104可以被配置为基于由高侧比较单元108和低侧比较单元110的确定而向控制单元102输出一个或多个故障信号。此外,给定类型的故障(例如,晶体管故障,或由于比较单元故障引起的故障)可能取决于是在功率开关导通时识别故
障(指示功率开关故障)还是功率开关关断时识别故障(指示由于比较单元故障引起的故障)。功率开关中的故障在本文中被称为类型1故障,而由于比较单元故障引起的故障在本文中被称为类型2故障。
29.半桥驱动器电路104可以被配置为:响应于第一漏极到源极电压的变化而向控制单元102输出第一功率开关故障信号(例如,高侧功率开关116中的类型1故障);并且响应于第二漏极到源极电压高于第一漏极到源极阈值而将向控制单元102输出第二功率开关故障信号(例如,低侧功率开关118中的类型1故障)。响应于类型1故障,控制单元102可以被配置为禁用半桥电路104或可能定义更有限的低功能操作模式。控制单元102还可以发出用于系统的维护警报,并且可能禁止与图1所示系统相关联的一个或多个车辆功能。在一些情况下,半桥驱动器电路104甚至可以被配置为响应于输出第一或第二故障信号以识别类型1故障而禁用或限制半桥的操作,这在一些应用中可能是希望的,以改善响应类型1故障的反应时间。
30.半桥驱动器电路104还可被配置为响应于第三漏极到源极电压低于第三漏极到源极阈值而向控制单元102输出第一比较器故障信号(例如,高侧比较单元108中的类型1故障),并响应于第四漏极到源极电压低于第四漏极到源极阈值而向控制单元102输出第二比较器故障信号(例如,低侧比较单元110中的类型2故障)。响应于类型2故障,控制单元102可以被配置为发出用于系统的维护警报,可能抑制与系统相关联的一个或多个车辆功能。类型2故障仅表明监控功能不可靠。因此,由于类型2故障不一定意味着功率开关116或118有任何问题(而仅表示比较单元108或110有问题),因此在一些示例中,控制单元102在接收到type2故障时,适当的响应可能是不抑制车辆功能的维护警报。
31.图2是控制外部半桥220中的两个功率开关216、218的桥驱动器(204a和204b)的概念图。如图所示,桥驱动器204a向功率开关216、218的栅极发送通/断信号,以便以互补的方式控制功率开关216、218的导通和关断。当高侧功率开关216导通时,低侧功率开关218关断,类似地,当低侧功率开关218导通时,高侧功率开关216关断。如上所述,在某些情况下,当两个功率开关都短时间关断时,在每个开关周期中可能会有一个短暂的所谓“死区时间”,这有助于确保两个开关不会同时导通。
32.在图2所示示例中,桥驱动器204b包括高侧漏极到源极比较器208和低侧漏极到源极比较器210。根据本公开,当高侧功率开关216导通且低侧功率开关218关断时,高侧漏极到源极比较器208和低侧漏极到源极比较器210都提供有用的逻辑信号。此外,当高侧功率开关216关断且低侧功率开关218导通时,高侧漏极到源极比较器208和低侧漏极到源极比较器210都提供有用的逻辑信号。因此,在每个功率开关216和218的导通阶段和关断阶段中,高侧漏极到源极比较器208和低侧漏极到源极比较器210都提供有用的逻辑信号
33.具体地,高侧漏极到源极比较器208将漏极到源极电压与参考电压(vref)、例如300mv进行比较。当高侧功率开关216关断且低侧功率开关218导通时,桥驱动器204b期望来自高侧漏极到源极比较器208的高值。如果在高侧功率开关216关断且低侧功率开关218导通时没有来自高侧漏极到源极比较器208的高值,则桥驱动器204b可以向控制单元报告潜在故障。该潜在故障可指示高侧漏极到源极比较器208不一定可靠。类似地,当低侧功率开关218关断且高侧功率开关216导通时,桥驱动器204b期望来自低侧漏极到源极比较器210的高值。如果当高侧功率开关216导通并且低侧功率开关218关断时没有来自低侧漏极到源
极比较器210的高值,则桥驱动器204b可以向控制单元报告潜在故障。
34.本公开的电路和技术可以显著减少与类型2故障相关联的检测时间(例如,小于与安全相关联的车辆特征(例如动力转向)相关联的容错时间间隔)。这些电路和技术还可以在运行期间提供永久和持续的监控,而不是仅在启动时进行监控。
35.在一些示例中,系统可以检查以确认所有比较器都在切换,并且如果不能达到比较器状态,则可以在系统中发出警报。可以在每个pwm周期内对每个功率开关执行检查,这在给电路上电时通常比一次更频繁。实现该系统所需的唯一附加电路装置可以包括在功率开关不活动时在关断状态期间检查比较器输出的逻辑。
36.该电路和技术还可以提供的优点是:反应时间比不用所描述电路所能实现的反应时间快得多。因此,这些电路和技术可以用作一种安全机制,确保在几毫秒甚至一毫秒范围内的容错时间间隔内检测到所有故障。
37.即使在对应的mosfet处于关断状态时,也可以根据预期的输出电平连续检查漏极到源极比较器的输出。隐含地,可以周期性地监控比较器的切换(例如,可以检测到卡顿状态),因为比较器可以被配置为在对应的功率开关的第一操作状态(mosfet导通)期间具有一个状态,而在对应的功率开关的另一操作状态(mosfet关断)期间具有相反的状态。在这种情况下,如果比较器输出没有切换,则可以将潜在故障报告给控制单元。系统地,每个半桥的两个监控比较器可以始终在有源mosfet的导通时间之后指示互补输出电平,例如,以确保在两个功率开关暂时关断时的所谓“死区时间”之后进行监控。在某些情况下,在任何给定功率开关的每个导通间隔内,可以在导通间隔的所谓“死区时间”t(vds-blank)之后和一个导通间隔的短暂滤波时间t(vds-filt)之后检查该给定功率开关的比较器。潜在故障可以由存储在驱动器中的逻辑位发信号通知,并定期或在识别故障时传送到控制单元。
38.所描述的运行时间期间的自测试允许显著短暂的故障检测间隔。此外,运行期间的自检可以在严重故障发生之前检测到监控功能的故障,从而当短路监控功能无法正常工作时,控制单元可以决定在进入临界状态之前停止电机的运行。因此,本发明所描述的自检可以提高电路的安全性。
39.图3是示出布置用于控制电动机的操作的三个半桥的电路图。功率开关304a和306a定义第一半桥,功率开关304b和306b定义第二半桥,并且功率开关304c和306c定义第三半桥。每个半桥可由半桥驱动器电路控制,其类似于图1的半桥驱动器电路104或图2的204a、204b。单独的驱动器(类似于图1的驱动器104)也可以用于每个半桥,或者电机驱动器可以将用于多个半桥的多个不同驱动器实现到一个公共集成电路中。此外,相数不限于三个。该技术还可以应用于用于控制六相电动机的六个半桥中的每一个,或针对其他数量的相应用。此外,这些技术可以应用于使用半桥的其他设置,例如,用于与电机控制无关的其他应用。
40.图4是示出根据本公开的示例方法的流程图。将从图1的半桥驱动器电路104和系统100的角度来描述图4,虽然其他电路或系统也可以实现该方法。如图4所示,半桥驱动电路104控制高侧功率开关116导通和低侧功率开关118关断(401)。例如,半桥驱动器电路104通过第一输出引脚122将信号传送到高侧功率开关116的栅极,以便将高侧功率开关116控制到导通状态。此外,半桥驱动器电路104将信号传送到低侧功率开关118的栅极,以将低侧功率开关118控制到关断状态。
41.当高侧功率开关116导通且低侧功率开关118关断时,高侧比较单元108确定与高侧功率开关116相关联的漏极到源极电压(402),并且低侧比较单元110确定与低侧功率开关118相关联的漏极到源极电压(403)。此外,高侧比较单元108可以将与高侧功率开关116相关联的漏极到源极电压与阈值进行比较,并且低侧比较单元110可以将与低侧功率开关118相关联的漏极到源极电压与阈值进行比较。这些比较可用于识别是否存在故障。
42.如果高侧比较单元108基于高侧功率开关116的所确定的漏极到源极电压识别出故障,则半桥驱动器电路104可以向控制单元102发出警报命令(显示为“故障1”)。在这种情况下,控制单元102可以对系统100采取适当行动,例如禁用半桥驱动器电路104或以其他方式控制系统100以低功率安全模式操作直到可以执行维护。此外,如果低侧比较单元110基于低侧功率开关118的所确定的漏极到源极电压识别出故障,则半桥驱动器电路104可以向控制单元102发出警报命令(显示为“故障2”)。在这种情况下,控制单元102可以对系统100采取适当行动,例如发出低侧比较单元110不可靠的警报,这也可以包括用于在低功率安全模式下操作直到可以在低侧比较单元110上执行维护的命令或控制。
43.如图4进一步所示,半桥驱动器电路104然后控制高侧功率开关116关断和低侧功率开关118导通(404)。例如,半桥驱动电路通过第一输出引脚122将信号传递给高侧功率开关116的栅极,以便控制高侧功率开关116处于关断状态,并且半桥驱动电路104将信号传递到低侧功率开关118的栅极,以便将低侧功率开关118控制到导通状态。
44.当高侧功率开关116关断且低侧功率开关118导通时,低侧比较单元110确定与低侧功率开关118相关联的漏极到源极电压(405),并且高侧比较单元108确定与高侧功率开关116相关联的漏极到源极电压(406)。此外,低侧比较单元110可以将与低侧功率开关118相关联的漏极到源极电压与阈值进行比较,并且高侧比较单元108可以将与高侧功率开关116相关联的漏极到源极电压与阈值进行比较。这些比较可用于识别是否存在故障。
45.如果低侧比较单元110在处于导通状态时基于低侧功率开关118的所确定的漏极到源极电压识别故障,则半桥驱动器电路104可以向控制单元发出警报命令102(显示为“故障1'”)。在这种情况下,控制单元102可以对系统100采取适当的行动,例如禁用半桥驱动器电路104或以其他方式控制系统100以低功率安全模式操作直到可以执行维护。此外,如果高侧比较单元108基于高侧功率开关116的所确定的漏极到源极电压识别出故障,则半桥驱动器电路104可以向控制单元102发出警报命令(显示为“故障2'”)。在这种情况下,控制单元102可以对系统100采取适当的行动,例如发出高侧比较单元108不可靠的警报,这也可以包括用于在安全低功率模式下操作直到可以在高侧比较单元108上进行维护的命令或控制。
46.与图4所示的步骤一致,控制包括高侧功率开关和低侧功率开关的半桥的方法可以包括确定第一漏极到源极电压(402),其中当高侧功率开关导通时,第一漏极到源极电压与高侧功率开关相关联;确定第二漏极到源极电压(405),其中当低侧功率开关导通时,第二漏极到源极电压与低侧功率开关相关联;确定第三漏极到源极电压(403),其中当高侧功率开关关断时,第三漏极到源极电压与高侧功率开关相关联;以及确定第四漏极到源极电压(406),其中当低侧功率开关关断时,第四漏极到源极电压与低侧功率开关相关联。此外,此方法可在操作期间发生在半桥的每个完整开关周期内。该方法还可以包括响应于第一漏极到源极电压高于第一漏极到源极阈值,向控制单元输出第一功率开关故障信号(例如,图
4中的故障1);响应于第二漏极到源极电压高于第二漏极到源极阈值,向控制单元输出第二功率开关故障信号(例如图4中的故障1');并且响应于控制单元接收到第一功率开关故障信号或第二功率开关故障信号,通过控制单元发出功率开关警报。此外,该方法可以包括响应于第三漏极到源极电压低于第三漏极到源极阈值,向控制单元输出第一比较器故障信号(例如,图4中的故障2);响应于第四漏极到源极电压低于第四漏极到源极阈值,向控制单元输出第二比较器故障信号(例如,图4中的故障2');响应于控制单元接收到第一比较器故障信号或第二比较器故障信号,通过控制单元发出维护警报。
47.前述段落中描述的方法和图1中所示的方法。在半桥电路的每个开关周期中可能会出现图4的情况,并且可以以与半桥中的两个功率开关的通/断切换的互补操作相一致的互补方式执行确定。因此,当高侧功率开关导通时确定与高侧功率开关相关联的第一漏极到源极电压(402)可以在当低侧功率开关关断时确定与低侧功率开关相关联的第三漏极到源极电压(403)的同时发生。类似地,当低侧功率开关导通时确定与低侧功率开关相关联的第二漏极到源极电压(405)可以在当高侧功率开关关断时确定与高侧功率开关相关联的第四漏极到源极电压(406)的同时发生。
48.本文所述的功率开关(例如,功率开关116、118、216、218)可以各自包括功率晶体管,例如金属氧化物半导体场效应晶体管(mosfet)。mosfet可以在硅中形成,在这种情况下,mosfet可以被称为硅mosfet。或者,mosfet可以形成在另一种半导体材料中,例如碳化硅(sic)或氮化镓(gan),在这种情况下,mosfet可以被称为sic mosfet或gan mosfet。实际上,本公开的技术对于监控用于控制三相电动机的mosfet可能特别有用,例如在车辆中用于动力转向、制动或其他功能的那些。本发明的技术还可以与其他类型的功率开关一起工作,例如双极栅极晶体管(bgt),在这种情况下,漏极到源极的监控将包括对bgt的集电极到发射极电压的监控。
49.以下条款可以说明本公开的一个或多个方面。
50.条款1-一种驱动器电路,被配置为控制包括高侧功率开关和低侧功率开关的半桥,所述驱动器电路包括:高侧比较单元,被配置为确定第一漏极到源极电压,其中当所述高侧功率开关导通时,所述第一漏极到源极电压与所述高侧功率开关相关联;和低侧比较单元,被配置为确定第二漏极到源极电压,其中当所述低侧功率开关导通时,所述第二漏极到源极电压与所述低侧功率开关相关联,其中所述高侧比较单元还被配置为确定第三漏极到源极电压,其中当所述高侧功率开关关断时,所述第三漏极到源极电压与所述高侧功率开关相关联,并且其中所述低侧比较单元还被配置为确定第四漏极到源极电压,其中当所述低侧功率开关关断时,所述第四漏极到源极电压与所述低侧功率开关相关联。
51.条款2-根据条款1的驱动器电路,其中驱动器电路被配置为:基于所述确定中的一个或多个确定,向控制单元输出一个或多个故障信号。
52.条款3-根据条款2的驱动器电路,其中驱动器电路被配置为:响应于所述第一漏极到源极电压高于第一漏极到源极阈值,向所述控制单元输出第一功率开关故障信号;以及响应于所述第二漏极到源极电压高于第二漏极到源极阈值,向所述控制单元输出第二功率开关故障信号。
53.条款4-根据条款3的驱动器电路,其中驱动器电路被配置为:响应于输出所述第一或第二功率开关故障信号,禁用或限制所述半桥的操作。
54.条款5-根据条款3或4的驱动器电路,其中所述驱动器电路还被配置为:响应于第三漏极到源极电压低于第三漏极到源极阈值,向控制单元输出第一比较器故障信号;以及响应于第四漏极到源极电压低于第四漏极到源极阈值,向控制单元输出第二比较器故障信号。
55.条款6-根据条款5的驱动器电路,其中第一漏极到源极阈值等于所述第二漏极到源极阈值,并且其中所述第三漏极到源极阈值等于所述第四漏极到源极阈值。
56.条款7-根据条款6的驱动器电路,其中第一和第二漏极到源极阈值不同于所述第三和第四漏极到源极阈值。
57.条款8-根据条款1-7中任一项的驱动器电路,其中驱动器电路被配置为:通过传送到所述第一和第二功率开关的第一和第二栅极信号,控制所述第一和第二功率开关的导通/关断状态.
58.条款9-根据条款1-8中任一项的驱动器电路,还包括多个驱动器电路,被配置为控制多个半桥。
59.条款10-根据条款9的驱动器电路,其中多个半桥被配置为控制多相电动机。
60.条款11-一种系统,包括控制单元;和驱动电路,被配置为接收来自控制单元的控制信号并基于控制信号控制半桥,其中半桥包括高侧功率开关和低侧功率开关,驱动电路包括:高侧比较单元,被配置为确定第一漏极到源极电压,其中当高侧功率开关导通时,第一漏极到源极电压与高侧功率开关相关联;和低侧比较单元,被配置为确定第二漏极到源极电压,其中当低侧功率开关导通时,第二漏极到源极电压与低侧功率开关相关联,其中高侧比较单元还被配置为确定第三漏极到源极电压,其中当高侧功率开关关断时,第三漏极到源极电压与高侧功率开关相关联,并且其中所述低侧比较单元还被配置为确定第四漏极到源极电压,其中当所述低侧功率开关关断时,所述第四漏极到源极电压与所述低侧功率开关相关联。
61.条款12-根据条款11的系统,系统还包括所述高侧功率开关和所述低侧功率开关。
62.条款13-根据条款11或12的系统,其中驱动器电路被配置为:响应于第一漏极到源极电压高于第一漏极到源极阈值,向控制单元输出第一功率开关故障信号;以及响应于第二漏极到源极电压高于第二漏极到源极阈值,向控制单元输出第二功率开关故障信号。
63.条款14-根据条款13的系统,其中控制单元被配置为:响应于接收到所述第一功率开关故障信号或所述第二功率开关故障信号,禁用或限制所述半桥的操作。
64.条款15-根据条款13或14的系统电路,其中驱动器电路还被配置为:响应于第三漏极到源极电压低于第三漏极到源极阈值,向控制单元输出第一比较器故障信号;以及响应于第四漏极到源极电压低于第四漏极到源极阈值,向控制单元输出第二比较器故障信号。
65.条款16-根据条款15的系统,其中控制单元被配置为:响应于接收到所述第一比较器故障信号或所述第二比较器故障信号,发出用于所述系统的维护警报。
66.条款17-根据条款11-16中任一项的系统,还包括多个驱动器电路,其被配置为控制多个半桥,其中所述多个半桥被配置为控制多相电动机。
67.条款18-根据条款17的系统,该系统还包括多相电动机。
68.条款19-一种控制包括高侧功率开关和低侧功率开关的半桥的方法,所述方法包括:确定第一漏极到源极电压,其中当高侧功率开关导通时,第一漏极到源极电压与高侧功
率开关相关联;确定第二漏极到源极电压,其中当低侧功率开关导通时,第二漏极到源极电压与低侧功率开关相关联;确定第三漏极到源极电压,其中当高侧功率开关关断时,第三漏极到源极电压与高侧功率开关相关联;和确定第四漏极到源极电压,其中当低侧功率开关关断时,第四漏极到源极电压与低侧功率开关相关联。
69.条款20-根据条款19的方法,还包括:响应于第一漏极到源极电压高于第一漏极到源极阈值,向控制单元输出第一功率开关故障信号;响应于第二漏极到源极电压高于第二漏极到源极阈值,向控制单元输出第二功率开关故障信号;以及响应于控制单元接收到第一功率开关故障信号或第二功率开关故障信号,通过控制单元发出功率开关警报。
70.条款21-根据条款19或20的方法,还包括:响应于第三漏极到源极电压低于第三漏极到源极阈值,向控制单元输出第一比较器故障信号;响应于第四漏极到源极电压低于第四漏极到源极阈值,向控制单元输出第二比较器故障信号;以及响应于控制单元接收到第一比较器故障信号或第二比较器故障信号,通过控制单元发出维护警报。
71.条款22-根据条款19-21中任一项的方法,还包括:在确定第三漏极到源极电压的同时确定第一漏极到源极电压;以及在确定第四漏极到源极电压的同时确定第二漏极到源极电压。
72.在本公开中已经描述了各个方面。这些和其他方面在以下权利要求的范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1