用于空气压缩机的马达的无传感器控制的异常诊断方法与流程
本公开涉及一种用于空气压缩机的马达的无传感器控制的异常诊断方法。更具体地,本公开涉及一种用于空气压缩机的马达的无传感器控制的异常诊断方法,该方法能够快速判断包括转子的位置对准控制的无传感器控制失败,并能够在无传感器控制失败时中断马达的驱动控制。
背景技术:
1、搭载在作为环保型车辆之一的氢燃料电池车辆中的燃料电池系统包括燃料电池堆、氢供应装置、空气供应装置、热和水管理系统以及控制器(燃料电池控制单元(fcu))。燃料电池堆通过反应气体(即,作为燃料气体的氢和作为氧化剂气体的氧)的电化学反应产生电能。氢供应装置向燃料电池堆供应作为燃料气体的氢。空气供应装置向燃料电池堆供应包含氧的空气。热和水管理系统控制燃料电池堆的操作温度,并执行水管理功能。控制器控制燃料电池系统的整体操作。
2、在燃料电池系统中,氢供应装置包括氢储存单元(氢罐)、调节器、氢供应管路、氢压力控制阀(也称为“氢供应阀”)、氢压力传感器、氢再循环装置等。此外,空气供应装置包括空气供应管路、过滤器、鼓风机、空气压缩机、加湿器等。热和水管理系统包括电动水泵(冷却剂泵)、水箱、散热器、三通阀、聚水器、排水阀等。
3、此外,控制器(燃料电池控制单元(fcu))控制氢压力控制阀的开度,并因此控制氢操作压力。燃料电池控制单元控制空气压缩机或鼓风机的驱动,并控制系统内的其他阀。
4、最近,随着燃料电池车辆的性能的进一步提高,呈现作为车辆动力源的燃料电池堆的所需输出增加的趋势。因此,也呈现向燃料电池堆供应空气的空气压缩机中的空气压缩比和所需空气流量增加的趋势。为此,需要提高空气压缩机中为了空气压缩而驱动的马达的最大速度。
5、为了对马达进行位置控制,空气压缩机包括作为位置传感器的霍尔传感器。霍尔传感器易受热影响。因此,随着空气压缩机的马达的速度增加,马达中产生的热量也增加。随着马达温度上升可能导致霍尔传感器的使用受到限制。
6、因此,需要开发一种不配备有霍尔传感器的无传感器控制技术。因此,最近正在开发执行无传感器控制的控制装置,该控制装置在无霍尔传感器的情况下驱动和控制空气压缩机的马达。
7、与空气压缩机的马达的无传感器控制相关的专利文献示例包括公开号为10-2021-0041712(2021年4月16日)和10-2021-0011110(2021年2月1日)的韩国专利申请。根据已知的无传感器控制方法,执行空气压缩机的马达的位置对准控制,以确定转子的初始位置后马达开始驱动。
8、然而,由于马达的转子受到限制或由于电流的施加不当,可能无法正常地通过位置对准控制来确定转子的初始位置。在这种状态下,在马达开始驱动的情况下,控制失败并且估计的马达的速度会发散。
9、前述内容仅旨在帮助理解本公开的背景,并不旨在表示本公开落入本领域技术人员已知的现有技术的范围内。
技术实现思路
1、本公开的目的是提供一种用于空气压缩的马达的无传感器控制的异常诊断方法,该方法能够快速判断无传感器控制失败并在无传感器控制失败时中断马达的驱动控制。在马达驱动之前,很难预先判断位置对准控制是否成功。在位置对准控制失败的情况下,马达的估计速度发散。因此,需要快速判断无传感器控制失败,并在无传感器控制失败时中断马达的驱动控制。
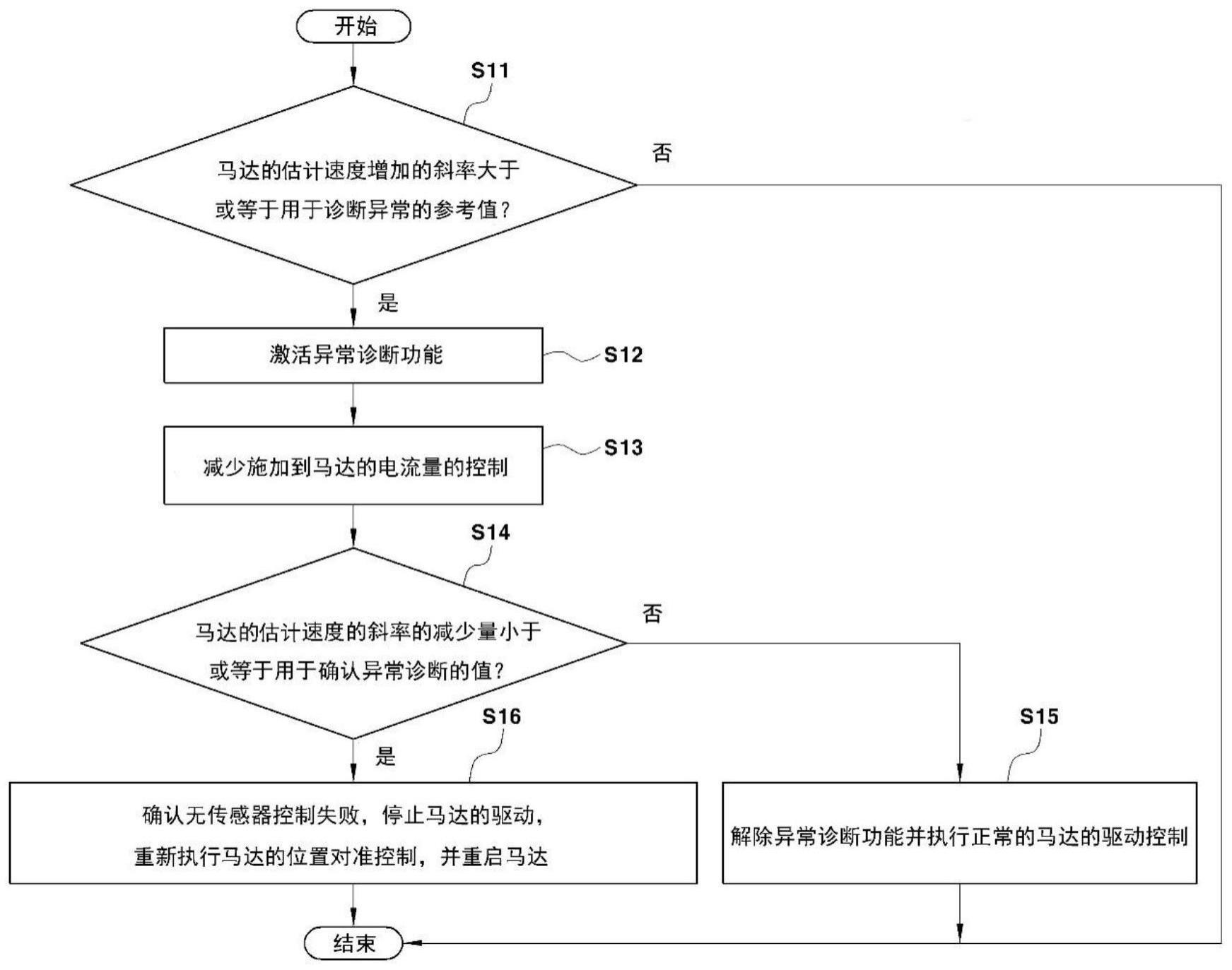
2、根据本公开的方面,提供一种用于空气压缩机的马达的无传感器控制的异常诊断方法,该方法包括:由控制器在马达启动时实时估计空气压缩机的马达的速度;由控制器根据估计的马达的速度的斜率判断是否满足激活无传感器控制的异常诊断功能的预设条件;当满足预设条件时,由控制器执行减少施加到马达的电流量的控制操作;在执行减少电流量的控制操作期间,由控制器计算实时估计的马达的速度的斜率的减少量;以及由控制器通过将马达的速度的斜率的减少量与预设的用于确认无传感器控制的异常诊断的值进行比较来判断无传感器控制是否失败。
3、因此,根据用于空气压缩机的马达的无传感器控制的异常诊断方法,可以在马达启动后立即基于马达的估计速度增加的斜率诊断无传感器控制是否失败,然后可以尝试重启马达。此外,可以快速接收从上级控制器传输的速度指令值,并且可以快速重启马达。因此,可以快速作出纠正应对以使燃料电池车辆可驱动。
4、此外,根据本公开,可以在保持控制装置的现有硬件配置而不对其进行任何改变的情况下通过软件逻辑以简单的方式额外地执行无传感器控制的异常诊断功能。因此,可以实现将新功能添加到燃料电池车辆的燃料电池系统的空气供应装置的效果。
5、在另外的实施例中,将激活无传感器控制的异常诊断功能的预设条件设置为估计的马达的速度的斜率大于或等于预设的用于诊断无传感器控制的异常的参考值的条件。
6、在另外的实施例中,执行减少施加到马达的电流量的控制操作的步骤进一步包括:由控制器使用预设的斜率来减少电流指令值,从而基于电流指令值减少通过逆变器施加到马达的电流量。
7、在另外的实施例中,判断无传感器控制是否失败的步骤进一步包括:判断马达的速度的斜率的减少量是否小于或等于预设的用于确认无传感器控制的异常诊断的值。在一些实施例中,当马达的速度的斜率的减少量小于或等于预设的值时,控制器判断为无传感器控制处于失败状态。
8、在另外的实施例中,当判断为无传感器控制处于失败状态时,控制器进一步执行以下步骤:中断马达的驱动;重新执行马达的位置对准控制;以及重启马达。
9、在另外的实施例中,当执行重启马达时,控制器:重复执行实时估计马达的速度;重复执行实时判断是否满足激活无传感器控制的异常诊断功能的条件;重复执行实时执行减少施加到马达的电流量的控制操作;重复执行实时计算马达的速度的斜率的减少量;以及重复执行判断无传感器控制是否失败。在一些实施例中,当控制器判断为无传感器控制处于正常状态时,执行正常的马达的驱动控制。
10、在各种实施例中,当马达的速度的斜率的减少量超过预设的用于确认无传感器控制的异常诊断的值时,控制器判断为无传感器控制处于正常状态,并执行正常的马达的驱动控制。
技术特征:
1.一种用于空气压缩机的马达的无传感器控制的异常诊断方法,所述方法包括:
2.根据权利要求1所述的方法,其中,
3.根据权利要求1所述的方法,其中,
4.根据权利要求1所述的方法,其中,
5.根据权利要求1所述的方法,其中,
6.根据权利要求5所述的方法,其中,
7.根据权利要求4所述的方法,其中,
8.根据权利要求4所述的方法,其中,
9.根据权利要求8所述的方法,其中,
技术总结
本公开提出一种用于空气压缩机的马达的无传感器控制的异常诊断方法,该方法包括:在马达启动时实时估计马达的速度;根据估计的马达的速度的斜率,判断是否满足激活无传感器控制的异常诊断功能的预设条件;当满足预设条件时,执行减少施加到马达的电流量的控制;在减少电流量期间,计算估计的马达的速度的斜率的减少量;以及通过将马达的速度的斜率的减少量与预设的用于确认无传感器控制的异常诊断的值进行比较来判断无传感器控制是否失败。
技术研发人员:康敏绣,金柱渊,金成道,柳昌锡
受保护的技术使用者:现代自动车株式会社
技术研发日:
技术公布日:2024/1/11
- 还没有人留言评论。精彩留言会获得点赞!