基于神经网络和扭矩反馈对车辆牵引马达的控制的制作方法
本主题公开涉及一种基于神经网络和扭矩反馈对车辆电动牵引马达的控制。
背景技术:
1、车辆(例如,汽车、卡车、建筑器械、农用器械),即电池电动车辆(bev)或电动混合动力车辆,使用牵引马达(即电动马达)代替或附加于内燃机以用于推进。牵引马达可以是具有被嵌入转子中的磁体的内部永磁体(ipm)马达。因此,虽然表面永磁体马达具有附接在转子表面的永磁体并且仅使用来自磁体的磁扭矩,但ipm马达除了磁扭矩外还通过磁体的阻抗使用磁阻。扭矩输入(例如,经由驾驶员操作的加速器踏板)被用于将来自车辆电池的直流电流(dc)转换为交流电流(ac)到ipm马达,以实现由扭矩输入请求的扭矩。该扭矩被供给动力传递单元使车轮转动。因此,可期望提供一种基于神经网络和扭矩反馈对车辆牵引马达的控制。
技术实现思路
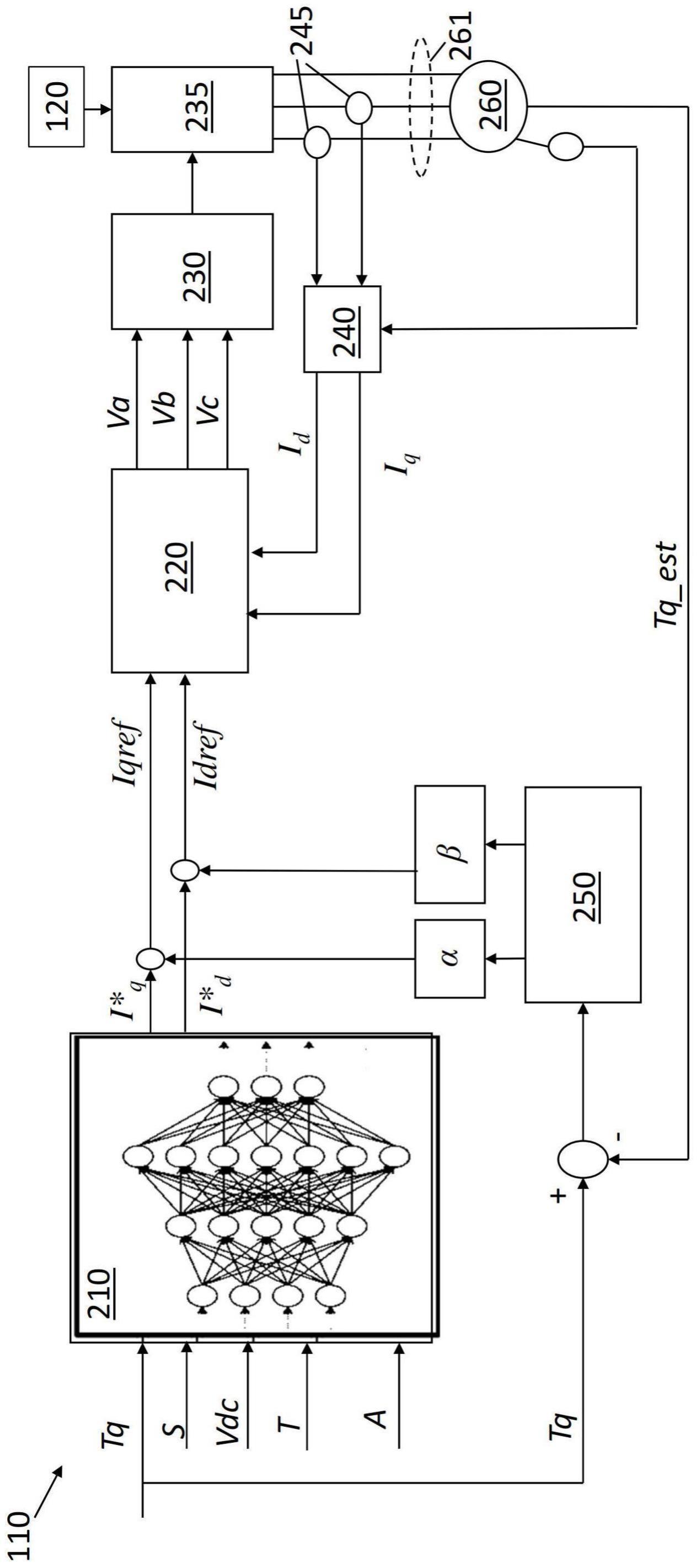
1、在一个示例性实施例中,一种车辆中的系统包括控制器来实现神经网络以基于输入提供电流命令。输入包括扭矩输入。该系统还包括电流控制器以基于来自控制器的电流命令通过逆变器提供三相电压。电动牵引马达基于三相电压的注入向车辆的变速器提供驱动动力。基于由将三相电压注入电动牵引马达得到的估计扭矩来校正由神经网络的实现得到的电流命令。
2、除了本文描述的一个或多个特征之外,该系统还包括基于被提供给电动牵引马达的三相电压的三个相中的两个处的电流测量值的第一反馈回路。
3、除了本文描述的一个或多个特征之外,电流测量值被转换器变换成直流和正交电流并且被提供给电流控制器。
4、除了本文描述的一个或多个特征之外,在第二反馈回路中提供由将三相电压注入电动牵引马达得到的估计扭矩。
5、除了本文描述的一个或多个特征之外,估计扭矩从扭矩输入中被减去并被提供给比例积分控制器。
6、除了本文描述的一个或多个特征之外,电流控制器基于用由比例积分控制器提供的输出参数对电流命令进行加权来获得参考直流和正交电流,并且还获得第一反馈回路的所述正交和直流电流。
7、除了本文描述的一个或多个特征之外,对实施神经网络的控制器的输入包括电动牵引马达的速度。
8、除了本文描述的一个或多个特征之外,神经网络是多区域神经网络,其具有为多个区域中的每一个区域定义的不同参数,每一个区域由扭矩输入的值的范围和电动牵引马达的速度的值的范围定义。
9、除了本文描述的一个或多个特征之外,多个区域是三个或更多个区域,并且多个区域中的至少一个代表多个区域中的另外两个的重叠。
10、除了本文描述的一个或多个特征之外,控制器对由多区域神经网络输出的电流命令实现线性插值或滤波。
11、在另一个示例性实施例中,一种组装在车辆中的系统的方法包括配置控制器来实现神经网络以基于输入提供电流命令。输入包括扭矩输入。该方法还包括配置电流控制器以基于来自控制器的电流命令通过逆变器提供三相电压,以及,布置电动牵引马达以基于三相电压的注入向车辆的变速器提供驱动动力。基于将三相电压注入电动牵引马达得到的估计扭矩来校正由神经网络的实现得到的电流命令。
12、除了本文描述的一个或多个特征之外,该方法还包括基于在被提供给电动牵引马达的三相电压的三个相中的两个处的电流测量值布置第一反馈回路。
13、除了本文描述的一个或多个特征之外,该方法还包括布置转换器以将电流测量值变换为直流和正交电流并且将直流和正交电流提供给电流控制器。
14、除了本文描述的一个或多个特征之外,该方法还包括布置第二反馈回路并且在所述第二反馈回路中提供由将三相电压注入电动牵引马达得到的估计扭矩。
15、除了本文描述的一个或多个特征之外,该方法还包括布置比例积分控制器以接收从扭矩输入中减去估计扭矩的结果。
16、除了本文描述的一个或多个特征之外,配置电流控制器包括电流控制器基于用由比例积分控制器提供的输出参数对电流命令进行加权获得参考直流和正交电流并且还获得第一反馈回路的正交和直流电流。
17、除了本文描述的一个或多个特征之外,实现神经网络的控制器的输入包括电动牵引马达的速度。
18、除了本文描述的一个或多个特征之外,配置控制器来实现神经网络包括控制器实现多区域神经网络,其具有为多个区域中的每一个区域定义的不同参数,每一个区域由扭矩输入的值的范围和电动牵引马达的速度的值的范围定义。
19、除了本文描述的一个或多个特征之外,多个区域是三个或更多个区域,并且多个区域中的至少一个代表多个区域中的另外两个的重叠。
20、除了本文描述的一个或多个特征之外,配置控制器包括控制器对由多区域神经网络输出的电流命令实现线性插值或过滤。
21、当结合附图进行以下具体实施方式时,本公开的上述特征和优点以及其他特征和优点是显而易见的。
技术特征:
1.一种在车辆中的系统,包括:
2.根据权利要求1所述的系统,还包括基于被提供给所述电动牵引马达的所述三相电压的三个相中的两个处的电流测量值的第一反馈回路。
3.根据权利要求2所述的系统,其中,所述电流测量值通过转换器被变换为直流和正交电流并被提供给所述电流控制器,在第二反馈回路中提供由将所述三相电压注入到所述电动牵引马达而得到的所述估计扭矩,从扭矩输入中减去所述估计扭矩并提供给比例积分控制器,以及,所述电流控制器基于用由所述比例积分控制器提供的输出参数对所述电流命令进行加权来获得参考直流和正交电流,并且还获得所述第一反馈回路的所述正交和直流电流。
4.根据权利要求1所述的系统,其中,对实现所述神经网络的所述控制器的所述输入包括所述电动牵引马达的速度。
5.根据权利要求4所述的系统,其中,所述神经网络是多区域神经网络,所述多区域神经网络具有为多个区域当中的每一个区域定义的不同参数,每一个区域由所述扭矩输入的值的范围和所述电动牵引马达的速度的值的范围来定义,所述多个区域为三个或更多个区域,且所述多个区域中的至少一个区域代表所述多个区域中的另外两个区域的重叠,以及,所述控制器还被配置为在由所述多区域神经网络输出的所述电流命令上实现线性插值或过滤。
6.一种组装在车辆中的系统的方法,所述方法包括:
7.根据权利要求6所述的方法,还包括基于被提供给所述电动牵引马达的所述三相电压的三个相中的两个处的电流测量值来布置第一反馈回路。
8.根据权利要求7所述的方法,还包括将转换器布置为将所述电流测量值变换成直流和正交电流并且将所述直流和正交电流提供给所述电流控制器,布置第二反馈回路并且在所述第二反馈回路中提供由将所述三相电压注入到所述电动牵引马达而得到的所述估计扭矩,以及,将比例积分控制器布置为接收从所述扭矩输入减去所述估计扭矩的结果,其中,所述配置所述电流控制器包括所述电流控制器基于用由所述比例积分控制器所提供的输出参数对所述电流命令进行加权来获得参考直流和正交电流并且还获得所述第一反馈回路的所述正交和直流电流。
9.根据权利要求6所述的方法,其中,对实现所述神经网络的所述控制器的所述输入包括所述电动牵引马达的速度。
10.根据权利要求9所述的方法,其中,所述配置所述控制器来实现所述神经网络包括所述控制器实现多区域神经网络,所述多区域神经网络具有为多个区域中的每一个区域定义的不同参数,每一个区域由所述扭矩输入的值的范围和所述电动牵引马达的速度的值的范围来定义,所述多个区域为三个或更多个区域,并且所述多个区域中的至少一个代表所述多个区域中另外两个区域的重叠,以及,所述配置所述控制器包括所述控制器对由所述多区域神经网络输出的所述电流命令实现线性插值或滤波。
技术总结
在车辆中的系统包括控制器来实现神经网络以基于输入提供电流命令。输入包括扭矩输入。该系统还包括电流控制器来根据来自控制器的电流命令通过逆变器提供三相电压。电动牵引马达基于三相电压的注入向车辆的变速器提供驱动动力。基于由将三相电压注入电动牵引马达得到的估计扭矩来校正由实现神经网络得到的电流命令。
技术研发人员:L.郝,Y-Y.王,S.戈帕拉克里希南
受保护的技术使用者:通用汽车环球科技运作有限责任公司
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!