逆变器驱动装置及其控制方法与流程
本发明涉及一种逆变器驱动装置和控制该装置的方法,其配置为改善逆变器的电压指令和逆变器的输出电压之间的线性度。
背景技术:
1、逆变器是将高压电池的直流电压转换为交流电压以驱动电机的组件。操作逆变器内的开关的方法包括脉宽调制(pulse width modulation,pwm)方法。
2、pwm方法包括空间矢量脉宽调制(space vector pulse width modulation,svpwm)方法和不连续脉宽调制(discontinuous pulse width modulation,dpwm)方法。这里,svpwm方法是一种连续调制方法,与单独调制三相电压指令的正弦脉宽调制(sinusoidal pulse width modulation,spwm)方法不同,svpwm是将电压指令调制为有效电压矢量和零电压矢量的技术,其中单个电压指令在复数空间中表示为参考空间矢量。dpwm方法是一种不连续调制方法,并且是仅用于调制两相电压指令的技术。
3、另一方面,pwm信号的脉冲宽度可以受到最小脉宽(minimum pulse width,mpw)条件的限制。mpw条件是指为了确保逆变器中设置的开关在一个占空比周期内保持接通和关断状态持续预定时间的最小脉宽的条件。
4、当pwm信号的脉冲宽度不满足mpw条件时,逆变器的电压指令和逆变器的输出电压可以处于非线性区域。在这种情况下,问题在于从逆变器输出的相电压失真,并且电机被驱动时产生的噪声增大。
5、上述内容作为本发明的背景技术仅旨在更好地理解本发明的背景,而不应被视为承认它们属于本领域技术人员已知的传统技术。
技术实现思路
1、本发明的技术目的是改善逆变器的电压指令与逆变器的输出电压之间的线性度。
2、本发明要实现的技术目标不限于上述技术目标,本发明所属领域的技术人员将清楚地理解未描述的其他技术目标。
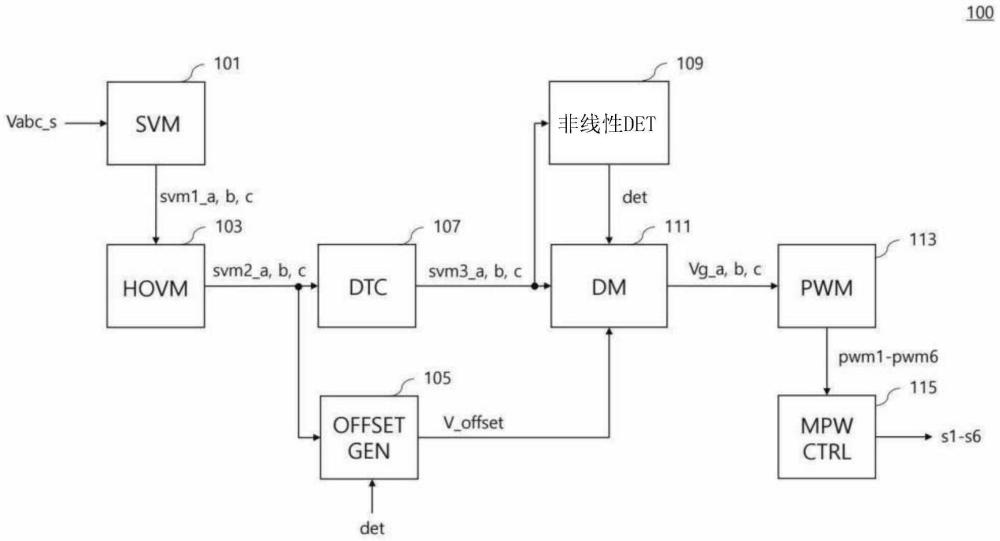
3、根据本发明的实施方案,一种逆变器驱动装置可以包括:逆变器和控制单元,所述逆变器具有多个支路,所述多个支路相应地对应于多个相中的每一个;所述控制单元基于相电压指令生成相应地对应于多个相中的每一个的空间矢量调制信号;根据空间矢量调制信号的每个电压是否包括在预定范围内,确定与空间矢量调制信号的至少一个空间矢量调制信号相对应的逆变器的输出电压是否处于非线性区域;在基于确定结果决定是否将偏移电压施加到每一个空间矢量调制信号之后,生成端电压指令;通过脉宽调制来调制端电压指令,控制多个支路中的每一个所包括的至少一个开关的接通状态。
4、此外,根据本发明的实施方案,一种控制逆变器驱动装置的方法可以包括:基于相电压指令生成空间矢量调制信号,多个支路中的每一个相应地对应于多个相中的每一个;通过确定空间矢量调制信号的每个电压是否处于预定范围内,确定与空间矢量调制信号的至少一个空间矢量调制信号相对应的逆变器的输出电压是否处于非线性区域;通过基于非线性区域的确定结果确定是否将偏移电压施加到每一个空间矢量调制信号来生成端电压指令;通过基于脉宽调制来调制端电压指令而控制逆变器中包括的开关的接通状态。
5、根据本发明,改善逆变器的电压指令与逆变器的输出电压之间的线性度可以减轻从逆变器输出的相电压的失真,并降低电机被驱动时产生的噪声。
6、本发明可实现的效果不限于上述效果,本发明所属领域的技术人员可以清楚地理解未描述的效果。
技术特征:
1.一种逆变器驱动装置,其包括:
2.根据权利要求1所述的逆变器驱动装置,其中,所述控制单元通过调制端电压指令来输出用于控制至少一个开关的接通状态的开关信号;其中,响应于非线性区域的确定结果为输出电压处于线性区域,所述控制单元输出基于空间矢量脉宽调制所调制的开关信号;响应于非线性区域的确定结果为输出电压处于非线性区域,所述控制单元输出基于不连续脉宽调制所调制的开关信号。
3.根据权利要求1所述的逆变器驱动装置,其中,所述控制单元包括空间矢量调制器,所述空间矢量调制器基于以相电压指令作为参考空间矢量的对称空间矢量调制来生成空间矢量调制信号。
4.根据权利要求1所述的逆变器驱动装置,其中,所述控制单元通过确定空间矢量调制信号的最大电压和最小电压是否包括在预定范围内来确定逆变器的输出电压是否处于非线性区域。
5.根据权利要求1所述的逆变器驱动装置,其中,当至少一个空间矢量调制信号的电压电平不包括在预定范围内时,所述控制单元确定出逆变器的输出电压处于非线性区域,并将用于不连续调制的偏移电压施加到每一个空间矢量调制信号。
6.根据权利要求5所述的逆变器驱动装置,其中,
7.根据权利要求5所述的逆变器驱动装置,其中,响应于非线性区域的确定结果为逆变器的输出电压处于非线性区域,所述控制单元以120°的相位间隔将偏移电压施加到每一个空间矢量调制信号;其中,所述控制单元将偏移电压设置为逆变器的直流链路的电压与空间矢量调制信号的最大电压或最小电压之间的差。
8.根据权利要求1所述的逆变器驱动装置,其中,所述控制单元包括死区时间补偿器,所述死区时间补偿器将由于死区时间引起的补偿电压施加到空间矢量调制信号。
9.根据权利要求8所述的逆变器驱动装置,其中,所述控制单元进一步包括偏移发生器,所述偏移发生器基于空间矢量调制信号生成偏移电压,由于死区时间引起的补偿电压没有施加到所述空间矢量调制信号。
10.根据权利要求1所述的逆变器驱动装置,其中,所述控制单元包括脉宽调制器和最小脉宽控制器,所述脉宽调制器基于脉宽调制来调制端电压指令,以输出脉宽调制信号;所述最小脉宽控制器通过根据最小脉宽条件确定是否限制脉宽调制信号的脉冲宽度来输出用于控制至少一个开关的接通状态的开关信号。
11.一种控制逆变器驱动装置的方法,所述方法包括:
12.根据权利要求11所述的方法,其中,基于脉宽调制来调制端电压指令包括:
13.根据权利要求11所述的方法,其中,基于以相电压指令作为参考空间矢量的对称空间矢量调制来生成空间矢量调制信号。
14.根据权利要求11所述的方法,其中,确定逆变器的输出电压是否处于非线性区域包括:
15.根据权利要求11所述的方法,其中,响应于非线性区域的确定结果为逆变器的输出电压处于非线性区域,通过将用于不连续调制的偏移电压施加到每一个空间矢量调制信号来生成端电压指令。
16.根据权利要求15所述的方法,其中,
17.根据权利要求15所述的方法,其中,响应于非线性区域的确定结果为逆变器的输出电压处于非线性区域,通过以120°的相位间隔将偏移电压施加到每一个空间矢量调制信号来生成端电压指令;其中,所述偏移电压设置为逆变器的直流链路的电压与空间矢量调制信号的最大电压或最小电压之间的差。
18.根据权利要求11所述的方法,其进一步包括:将由于死区时间引起的补偿电压施加到空间矢量调制信号。
19.根据权利要求11所述的方法,其中,控制逆变器中包括的开关的接通状态包括:基于脉宽调制来调制端电压指令,以输出脉宽调制信号,并且通过根据最小脉宽条件确定是否限制脉宽调制信号的脉冲宽度来输出用于控制开关的接通状态的开关信号。
技术总结
本发明涉及逆变器驱动装置及其控制方法。逆变器驱动装置包括:逆变器和控制单元,所述逆变器具有相应地对应于多个相中的每一个的多个支路;所述控制单元基于相电压指令生成空间矢量调制信号,每一个空间矢量调制信号相应地对应于多个相中的每一个;通过确定空间矢量调制信号的每个电压是否包括在预定范围内,确定与空间矢量调制信号的至少一个空间矢量调制信号相对应的逆变器的输出电压是否处于非线性区域;通过基于非线性区域的确定结果确定是否将偏移电压施加到每一个空间矢量调制信号来生成端电压指令;通过基于脉宽调制来调制端电压指令,控制多个支路中的每一个所包括的至少一个开关的接通状态。
技术研发人员:林铉宰,李镕在,蔡荣湖,高永宽,李永基
受保护的技术使用者:现代自动车株式会社
技术研发日:
技术公布日:2024/3/17
- 还没有人留言评论。精彩留言会获得点赞!