一种逆变器系统的谐波抑制控制方法与流程
本发明涉及一种以逆变器系统运行控制的,尤其是一种逆变器系统的谐波抑制控制方法。
背景技术:
1、传统技术中,对于逆变器系统的运行控制方式较多,并且分别有五种,但是运行效果仍存在缺陷,具体地:
2、第一种现有技术,通过pwm调制技术调节输出电压,加大开关频率,可以降低电流谐波的畸变率,但是加大开关频率必定会带来更大的开关损耗,容易使开关过压,且设计、调试电路都比较复杂。
3、第二种现有技术,对特定谐波进行消除技术,设定某些低次谐波为零,通过傅里叶变换得到脉冲的相位角,进而进行控制。但该控制方法的缺点是需要求解非线性方程组并且需要足够大容量的存储空间。
4、第三种现有技术,通过增加有源电力滤波器进行抑制,其过程使首先检测线路中的谐波分量,通过注入幅值相同、相位相反的谐波来抵消掉线路中的谐波分量。缺点是该方式不是在源头抑制,而是发生后进行的补救,且成本较高。
5、第四种现有技术,利用pr控制器进行调节,但是会出现控制滞后的问题,影响控制时间。
6、第五种现有技术,利用控制算法加pi控制器进行调节,pi的调节过程中会带来一定程度的幅度的相位差和幅值差,会影响并网的进行和运行后的稳定性。
技术实现思路
1、本发明的目的是为了解决上述技术的不足而设计的一种逆变器系统的谐波抑制控制方法,其具体方式如下。
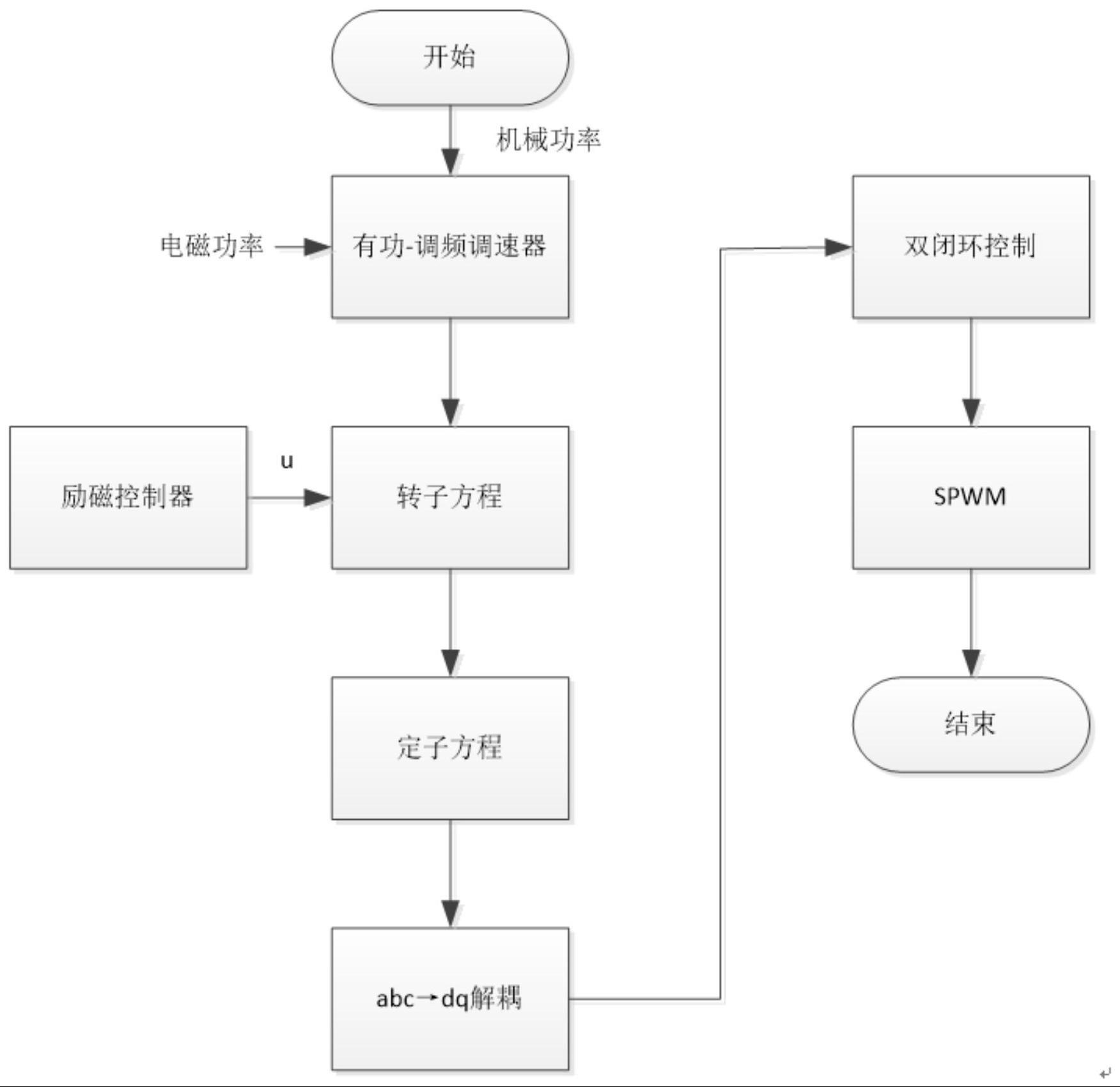
2、本发明所设计的一种逆变器系统的谐波抑制控制方法,包括如下控制步骤:
3、s1,利用有功-调频调速器中的机械运动转子方程得到线路ω,并通过有功-调频调速器中的机械运动转子方程进行积分而得到励磁电动势向量;
4、对于机械运动转子方程:
5、δω=ω-ω0
6、
7、式中,ω定义为机械角速度,ω0定义为额定角速度,tm定义为机械转矩,tc定义为电磁转矩,d定义为阻尼系数,d定义为阻尼系数;
8、s2,利用有功-调频调速器中的定子方程得到线路虚拟端电压,并进行abc-dq解耦;
9、对于定子方程:
10、
11、式中,e定义为电动势,定义为电感两端电压,ri定义为内阻电压;
12、s3,在电压外环和电流内环的双闭环控制下,通过pi调节器输出pwm波形,此时进入步骤s4;
13、s4,在并网运行后,利用在步骤s1-步骤s4的运行控制基础上与比例谐振控制模块结合控制调节运行,并且在电压外环和电流内环的双闭环控制下,通过比例谐振控制器对电压进行比例调节,以控制响应速度,同时对电压进行前馈补偿,当遭遇外部条件干扰时,转子释放其动能,使逆变器系统频率缓慢变化,此时引入转子惯量和阻尼系数至逆变器系统中;
14、s5,在步骤s1-步骤s4的逆变器系统运行过程中对谐波分量进行抑制。
15、作为优选,步骤s1-步骤s4运行控制的运行模型如下,
16、s11,利用电磁暂态方程建模,公式如下:
17、e=ωmi sinθ
18、p=ωmi(i·sinθ)
19、q=ωmi(i·cosθ)
20、式中,m定义为互感系数,i定义为励磁电流,θ定义为电角度,e定义为电动势,p定义为有功功率,q定义为无功功率;
21、s12,当逆变器系统有功负荷突变,输出的电磁功率发生变化,生成反馈信号传入功频调节器,此时进行调节阀门裕度,使系统达到新平衡,因此将有功频率调节系数定义为dp:
22、
23、s13,利用励磁调节器的无功调节,当发生突变时,励磁调节器会自动进行一次调压过程,因此将无功频率调节系数定义为dq:
24、
25、逆变器系统的一次调压时,引入无功-电压控制模型,得到vsg无功-电压控制方程,公式如下:
26、uref=u0+dq(q0-q)
27、式中:u0定义为额定电压幅值;q0定义为额定无功功率;uref定义为电压指令值,u定义为电压。
28、作为优选,在步骤s12中,转子选用隐极式时,磁极对数是1;结合转子运动方程和调节系数,得到有功-频率控制方程,公式如下:
29、
30、δω=ω-ω0
31、式中,pm定义为机械功率,pc定义为电磁功率,j定义为转动惯量。
32、当逆变器系统发生有功负荷突增时,pm升高,ω降低,反之pm降低,ω升高;在逆变器系统中的j和d的作用,ω不发生突变,变化为平缓,降低波动峰值,并将公式变形,公式如下:
33、
34、式中:p0定义为有功给定值;
35、由式可知,dp决定pm的大小,当ω>ω0时,逆变器系统功率存在多余部分,影响逆变器系统频率;当pm<p0时,逆变器系统释放功率,减小波动;反之逆变器系统吸收功率,加大波动。
36、本发明所描述的一种逆变器系统的谐波抑制控制方法,其利用谐波抑制基础上,引入vsg技术,设计比例谐振双环控制策略,通过对比有无比例谐振控制器时的电流和功率,进行电流谐波分析,最终实现一种经过改进的pr控制器谐波抑制控制策略,同时通过结合vsg技术和比例谐振控制器,通过电压外环和电流内环双闭环控制对逆变器进行谐波抑制,优化谐波抑制的能力。从而实现逆变器系统运行的稳定控制、降低能耗,减少对人工经验依赖目的,进一步提高逆变器的控制水平。
37、另外,vsg技术与比例谐振控制器结合的控制方法,并没有延长控制时间,而且解决传统pi控制器在控制输出电压上会产生一定幅度的相位差和幅值差,这就会影响是否能够成功并网且会影响并网后的正常运行的技术问题,更好的抑制了谐波。而逆变器系统采用比例谐振控制器能够优化输出特性,理论上能够实现无静态误差的输出电压,并且通过结合vsg技术,可以有效的提升逆变器运行的稳定性并且有效的优化抑制谐波分量,降低了损耗并且提升了系统智能化程度。
技术特征:
1.一种逆变器系统的谐波抑制控制方法,其特征在于,包括如下控制步骤:
2.根据权利要求1所述的一种逆变器系统的谐波抑制控制方法,其特征在于,步骤s1-步骤s4运行控制的运行模型如下,
3.根据权利要求2所述的一种逆变器系统的谐波抑制控制方法,其特征在于,在步骤s12中,转子选用隐极式时,磁极对数是1;结合转子运动方程和调节系数,得到有功-频率控制方程,公式如下:
技术总结
本发明所公开的一种逆变器系统的谐波抑制控制方法,其利用谐波抑制基础上,引入VSG技术,设计比例谐振双环控制策略,通过对比有无比例谐振控制器时的电流和功率,进行电流谐波分析,最终实现一种经过改进的PR控制器谐波抑制控制策略,同时通过结合VSG技术和比例谐振控制器,通过电压外环和电流内环双闭环控制对逆变器进行谐波抑制,优化谐波抑制的能力。从而实现逆变器系统运行的稳定控制、降低能耗,减少对人工经验依赖目的,进一步提高逆变器的控制水平。
技术研发人员:王一鸣,吴佳骜,许颇,夏鲲,蔡旭
受保护的技术使用者:锦浪科技股份有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!