电机的力矩控制电路及力矩控制方法、机械臂与流程
本申请涉及机器人,特别是涉及一种电机的力矩控制电路及力矩控制方法、机械臂。
背景技术:
1、随着机器人技术的发展,人机协作越来越重要,协作机器人,如机械臂等是机器人研究的热点之一。其中功率与力限制功能通常是机械臂实现人机协作的关键,该功能的实现需要机械臂具有良好的力矩检测和反馈能力。
2、相关技术中,使用相电流、转子位置和母线电流、电压进行力矩估算,但母线电流电压估算输出力矩的精度低,且响应慢,相电流采样容易受电机纹波电流的影响,造成电机力矩估算的精准度低。
技术实现思路
1、本申请提供一种电机的力矩控制电路及力矩控制方法、机械臂,以提高电机力矩估算的精准度,从而能够提高电机力矩控制的精准度。
2、为解决上述技术问题,本申请提出一种电机的力矩控制电路。该力矩控制电路包括:驱动电路,与电机连接,用于产生脉宽调制信号及脉宽调制信号的同步信号,并利用脉宽调制信号控制电机工作;力矩监测电路,分别与驱动电路及电机连接,用于在同步信号的触发下获取电机的相电流及转子位置,并基于相电流及转子位置估算电机的力矩。
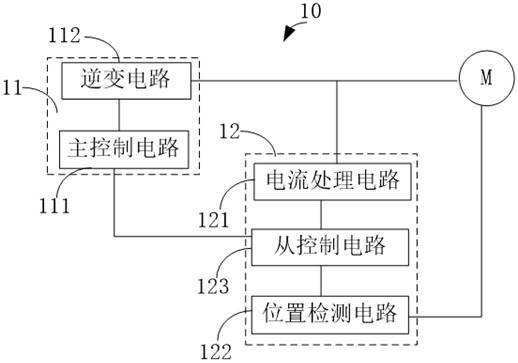
3、其中,驱动电路包括:主控制电路,用于产生脉宽调制信号及同步信号,主控制电路与力矩监测电路连接,以向力矩监测电路提供同步信号;逆变电路,分别与主控制电路及电机连接,用于在脉宽调制信号的控制下驱动电机工作;其中,力矩监测电路与逆变电路和电机之间的连接处连接。
4、其中,力矩监测电路包括:电流处理电路,与连接处连接,用于获取电机的相电流对应的电压信号;位置检测电路,与电机连接,用于获取电机的转子位置;从控制电路,分别与电流处理电路及位置检测电路连接,用于在同步信号的触发下从电流处理电路获取电压信号及从位置检测电路中获取转子位置,并基于电压信号获得相电流,及基于相电流及转子位置估算电机的力矩。
5、其中,电流处理电路包括:采样电阻,串接在驱动电路与电机之间;缓冲电路,分别与采样电阻的两端连接,且还与从控制电路连接,用于获取相电流在采样电阻上的分压为电压信号。
6、其中,从控制电路包括:第一从控制电路,分别与主控制电路及连接处连接,用于基于相电流及转子位置估算电机的第一力矩;第二从控制电路,分别与主控制电路及连接处连接,用于基于相电流及转子位置估算电机的第二力矩;第一从控制电路还与第二从控制电路连接,用于将第一力矩及第二力矩进行交叉验证,以实现对电机的力矩的安全监测。
7、其中,第一从控制电路与第二从控制电路集成设置在同一电路中;或者第一从控制电路集成于主控制电路内。
8、其中,第一从控制电路还与主控制电路连接,用于将交叉验证的结果反馈给主控制电路,主控制电路基于结果调整对电机的控制策略。
9、其中,力矩监测电路在同步信号的下降沿的触发下获取相电流及转子位置,同步信号的下降沿与脉宽调制信号的载波信号的波谷或者波峰在时序上对齐。
10、为解决上述技术问题,本申请提出一种电机的力矩控制方法。该力矩控制方法包括:获取脉宽调制信号及脉宽调制信号的同步信号,并利用脉宽调制信号控制电机工作;在同步信号的触发下获取电机的相电流及转子位置;基于相电流及转子位置估算电机的力矩,及对力矩进行安全监测。
11、其中,在同步信号的触发下获取电机的相电流及转子位置,包括:在同步信号的触发下获取电机的第一相电流及第一转子位置,及在同步信号的触发下获取电机的第二相电流及第二转子位置;基于相电流及转子位置估算电机的力矩,包括:基于第一相电流及第一转子位置估算电机的第一力矩,及基于第二相电流及第二转子位置估算电机的第二力矩;力矩控制方法还包括:将第一力矩及第二力矩进行交叉验证,以实现对电机的力矩的安全监测。
12、其中,力矩控制方法还包括:基于交叉验证的结果调整对电机的控制策略。
13、其中,同步信号的下降沿的触发下获取相电流及转子位置,同步信号的下降沿与脉宽调制信号的载波信号的波谷或者波峰在时序上对齐。
14、为解决上述技术问题,本申请提出一种机械臂。该机械臂包括:本体;电机,设置在本体内,用于带动本体的至少一部分运动;上述力矩控制电路,用于实现对电机的力矩控制。
15、区别于现有技术:本申请电机的力矩控制电路包括驱动电路及力矩监测电路,其中,驱动电路用于产生脉宽调制信号及脉宽调制信号的同步信号,并利用脉宽调制信号控制电机工作,实现对电机的驱动控制;力矩监测电路用于在该同步信号的触发下获取电机的相电流及转子位置,并基于该相电流及转子位置估算电机的力矩,实现对电机力矩的监测;且因相电流本身带有电机控制的脉宽调制信号的纹波电流,因此采用脉宽调制信号的同步信号触发力矩监测电路进行相电流及转子位置采样,能有效的抑制纹波电流的影响,提高相电流采样精准度,从而提高电机力矩估算的精准度,提高电机力矩控制的精准度。
技术特征:
1.一种电机的力矩控制电路,其特征在于,包括:
2.根据权利要求1所述的力矩控制电路,其特征在于,所述驱动电路包括:
3.根据权利要求1所述的力矩控制电路,其特征在于,所述力矩监测电路包括:
4.根据权利要求3所述的力矩控制电路,其特征在于,所述电流处理电路包括:
5.根据权利要求2所述的力矩控制电路,其特征在于,所述从控制电路包括:
6.根据权利要求5所述的力矩控制电路,其特征在于,所述第一从控制电路与所述第二从控制电路集成设置在同一电路中;或者
7.根据权利要求5所述的力矩控制电路,其特征在于,所述第一从控制电路还与所述主控制电路连接,用于将所述交叉验证的结果反馈给所述主控制电路,所述主控制电路基于所述结果调整对所述电机的控制策略。
8.根据权利要求1至7任一项所述的力矩控制电路,其特征在于,所述力矩监测电路在所述同步信号的下降沿的触发下获取所述相电流及所述转子位置,所述同步信号的下降沿与所述脉宽调制信号的载波信号的波谷或者波峰在时序上对齐。
9.一种电机的力矩控制方法,其特征在于,包括:
10.根据权利要求9所述的力矩控制方法,其特征在于,所述在所述同步信号的触发下获取所述电机的相电流及转子位置,包括:
11.根据权利要求10所述的力矩控制方法,其特征在于,所述力矩控制方法还包括:
12.根据权利要求9所述的力矩控制方法,其特征在于,所述同步信号的下降沿的触发下获取所述相电流及所述转子位置,所述同步信号的下降沿与所述脉宽调制信号的载波信号的波谷或者波峰在时序上对齐。
13.一种机械臂,其特征在于,包括:
技术总结
本申请公开了一种电机的力矩控制电路及力矩控制方法、机械臂。该力矩控制电路包括:驱动电路,与电机连接,用于产生脉宽调制信号及脉宽调制信号的同步信号,并利用脉宽调制信号控制电机工作;力矩监测电路,分别与驱动电路及电机连接,用于在同步信号的触发下获取电机的相电流及转子位置,并基于相电流及转子位置估算电机的力矩。通过这种方式,能够提高电机力矩估算的精准度,从而能够提高电机力矩控制的精准度。
技术研发人员:李乐荣,丁程润,张国柱,温元明,刘丹
受保护的技术使用者:库卡机器人(广东)有限公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!