一种光伏板阵列清洗机器人及挂轮结构的制作方法
本技术涉及光伏板清洗机器人,特别是指一种光伏板阵列清洗机器人及挂轮结构。
背景技术:
1、随着光伏行业的发展,光伏阵列形式有存在着各种不同的情况,有部分客户采用c型钢制作光伏阵列支架后再铺设光伏板,这样会存在常规清洗机器人的挂轮与光伏板边压干涉到,无法使用清洗机器人清洗。
技术实现思路
1、本实用新型要解决的技术问题是提供一种光伏板阵列清洗机器人及挂轮结构,实现c型轨道式光伏板阵列的自动清洗。
2、为解决上述技术问题,本实用新型的技术方案如下:
3、本实用新型实施例提供一种光伏板阵列清洗机器人的挂轮结构,包括:
4、与光伏板清洗机器人的尾端固定装置的一侧固定连接的轨道行走轮,所述轨道行走轮的直径大于一预设值,所述轨道行走轮行走于光伏板阵列的c型轨道的上表面;
5、与所述尾端固定装置的另一侧固定连接的限位大挂轮结构,所述限位大挂轮结构与所述轨道行走轮对应设置,且所述限位大挂轮结构贴合c型轨道的侧面。
6、可选的,所述尾端固定装置上具有供轴穿过的孔,所述轨道行走轮位于所述尾端固定装置的一侧,绕所述轴的第一端行走于光伏板阵列的c型轨道的上表面。
7、可选的,所述限位大挂轮结构位于所述尾端固定装置的另一侧,并与所述轴的第二端固定连接。
8、可选的,所述限位大挂轮结构包括:限位安装架以及与所述限位安装架固定连接的限位轮;
9、所述限位安装架与所述轴的第二端固定连接;
10、所述限位轮贴合c型轨道的侧面。
11、可选的,所述c型轨道包括:u形轨道槽,所述u形轨道槽的第一竖边具有向内伸出的第一延伸边,所述第二竖边具有向内伸出的第二延伸边;
12、所述轨道行走轮行走于所述第一竖边的上表面,所述限位轮贴合所述c型轨道的所述第一竖边的第一延伸边行走。
13、可选的,所述光伏板阵列的c型轨道位于光伏板阵列的缝隙位置。
14、可选的,所述光伏板阵列的c型轨道为钢轨道。
15、本实用新型的实施例还提供一种光伏板阵列清洗机器人,包括:机身以及如上所述的光伏板阵列清洗机器人的挂轮结构,尾端固定装置与所述机身固定连接。
16、本实用新型的上述方案至少包括以下有益效果:
17、本实用新型的上述方案,通过轨道行走轮与限位大挂轮结构在光伏板阵列的c型轨道上的配合行走,实现c型钢轨道式光伏板阵列的自动清洗。
技术特征:
1.一种光伏板阵列清洗机器人的挂轮结构,其特征在于,包括:
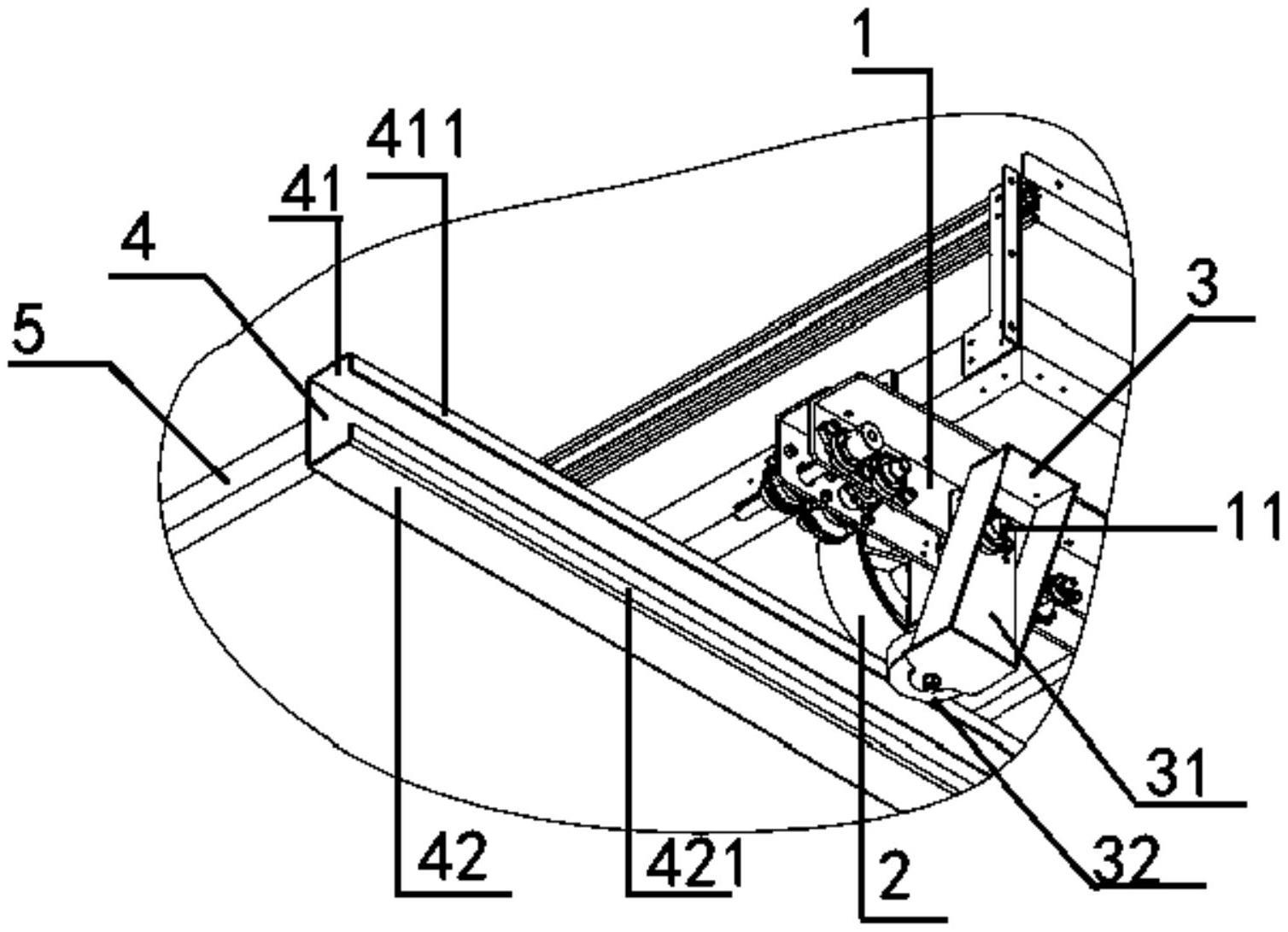
2.根据权利要求1所述的光伏板阵列清洗机器人的挂轮结构,其特征在于,所述尾端固定装置(1)上具有供轴(11)穿过的孔,所述轨道行走轮(2)位于所述尾端固定装置(1)的一侧,绕所述轴(11)的第一端行走于光伏板阵列的c型轨道(4)的上表面。
3.根据权利要求2所述的光伏板阵列清洗机器人的挂轮结构,其特征在于,所述限位大挂轮结构(3)位于所述尾端固定装置(1)的另一侧,并与所述轴(11)的第二端固定连接。
4.根据权利要求3所述的光伏板阵列清洗机器人的挂轮结构,其特征在于,所述限位大挂轮结构(3)包括:限位安装架(31)以及与所述限位安装架(31)固定连接的限位轮(32);
5.根据权利要求4所述的光伏板阵列清洗机器人的挂轮结构,其特征在于,所述c型轨道(4)包括:u形轨道槽,所述u形轨道槽的第一竖边(41)具有向内伸出的第一延伸边(411),第二竖边(42)具有向内伸出的第二延伸边(421);
6.根据权利要求1所述的光伏板阵列清洗机器人的挂轮结构,其特征在于,所述光伏板阵列的c型轨道位于光伏板阵列的缝隙位置。
7.根据权利要求1所述的光伏板阵列清洗机器人的挂轮结构,其特征在于,所述光伏板阵列的c型轨道为钢轨道。
8.一种光伏板阵列清洗机器人,其特征在于,包括:机身以及如权利要求1至7任一项所述的光伏板阵列清洗机器人的挂轮结构,尾端固定装置(1)与所述机身固定连接。
技术总结
本技术提供一种光伏板阵列清洗机器人及挂轮结构,该挂轮结构包括:与光伏板阵列清洗机器人的尾端固定装置的一侧固定连接的轨道行走轮,所述轨道行走轮的直径大于一预设值,所述轨道行走轮行走于光伏板阵列的C型轨道的上表面;与所述尾端固定装置的另一侧固定连接的限位大挂轮结构,所述限位大挂轮结构与所述轨道行走轮对应设置,且所述限位大挂轮结构贴合C型轨道的侧面。本技术的方案实现了C型轨道式光伏板阵列的自动清洗。
技术研发人员:蔡广,潘在松,刘庆文,连伟宗,冯宗海,余伟进,甘学伟,余伟雄
受保护的技术使用者:华能海南发电股份有限公司澄迈光伏电站
技术研发日:20221118
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!