一种机器人的线束支架的制作方法
本技术属于线束支架,尤其涉及一种机器人的线束支架。
背景技术:
1、随着科技的发展,机器人普遍运用在制造业中,例如机器人焊接,机器人搬运等,通过使用机器人提高制造业的生产效率,在使用机器人时,机器人内的内壁可能会有较多的线路,为了防止机器人在工作时,电缆限制机器人的工作,可能使用线束对机器人内部的电缆进行限制,并且通过支架将线束固定在机器人的壳体上,从而便于电缆进行整理限制,因此可知现有的线束支架基本上满足人们的实用需求,但仍然存在以下问题。
2、在使用线束对机器人内的电缆进行限制时,通过将线束夹夹持在若干组电缆表面,从而对电缆进行夹持,当线束夹夹持完毕后,为了避免夹持完成的电缆随意移动,可能会使用支架,通过支架将线束夹固定在机器人上,当机器人在工作的过程中,机器人中的部分零件接口可能会与电缆进行连接,机器人在移动时可能会带动电缆移动,使机器人中的零部件中的接口拉动电缆移动,由于支架通常通过螺纹安装或卡扣连接的方式将线束夹固定在机器人内壁上,可能使得电缆受到线束夹的限制,使电缆无法进行移动,从而可能造成机器人中的零部件拉扯电缆移动,当机器人中的零部件长期拉动电缆移动后,可能造成电缆断裂,为此我们提出一种机器人的线束支架。
技术实现思路
1、本实用新型提供一种机器人的线束支架,通过滑块在滑槽内进行滑动,便于电缆带动线束夹移动,并且转块在转槽内进行转动,便于电缆带动线束夹进行转动,使线束夹可以跟随电缆移动而移动,提高电缆使用的稳定性。
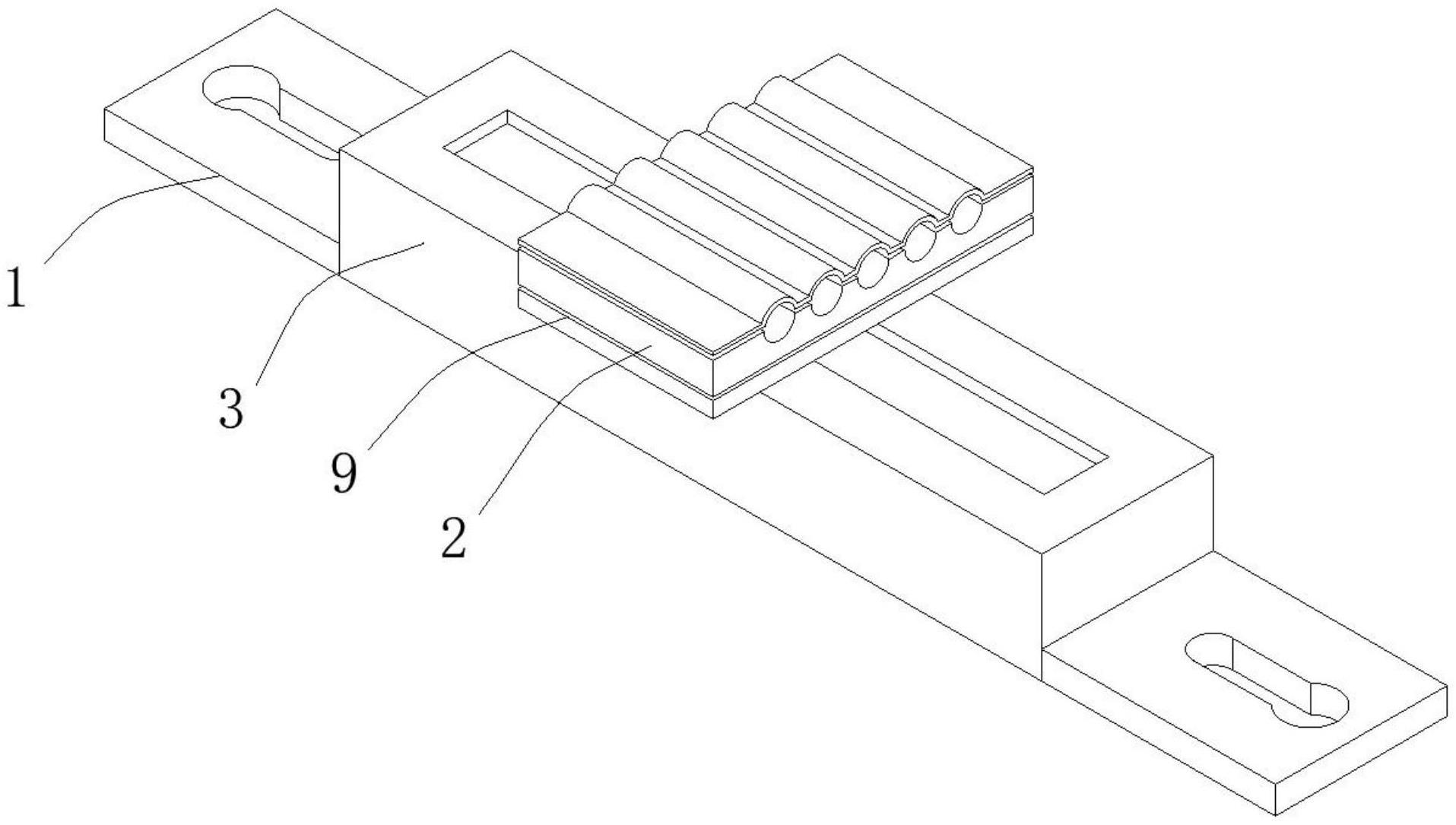
2、为实现上述目的,本实用新型提供如下技术方案:一种机器人的线束支架,包括挂耳和线束夹,所述挂耳中部固定有滑槽,且滑槽中部内嵌有滑块,所述滑块表面固定有转槽,且转槽内嵌有转块,所述转块末端固定有安装板,且安装板表面卡扣连接有线束夹。
3、进一步的,所述安装板两侧端部皆固定有弹簧槽,且弹簧槽中部皆贯穿有插销,所述插销表面皆套设有第二弹簧,所述第二弹簧两侧端部分别抵接在弹簧槽内壁和限位块表面之间,且限位块皆固定在插销上,所述插销一侧端部皆固定有拉把,所述插销末端皆套设有开设在定位杆中部的销槽,所述定位杆末端皆固定有贯穿安装板的线束夹。
4、进一步的,所述滑块中部皆贯穿有固定在滑槽内壁的滑杆,且滑杆表面皆套设有第一弹簧,所述第一弹簧两侧端部分别抵接在滑槽内壁和滑块表面之间。
5、进一步的,所述滑块中部皆开设有圆孔,所述滑杆皆设置为滑块中部开设的圆孔相互匹配的圆柱形。
6、进一步的,所述第一弹簧皆以滑块为中心点对称套设在滑杆表面,两组所述第一弹簧的弹力相等。
7、进一步的,所述拉把皆设置为“l”形,且拉把表面皆开设有若干组波浪形凹槽。
8、进一步的,所述弹簧槽两侧端部皆开设有矩形通孔,且限位块两侧的宽度大于弹簧槽两侧开设的矩形通孔内壁宽度。
9、本实用新型的有益效果是:
10、1、该机器人的线束支架设置有滑槽、滑块、转块和转槽,通过电缆带动线束夹移动后,线束夹通过安装板带动转块在转槽内进行转动,使线束夹可能跟随电缆进行转动,并且线束夹带动滑块在滑槽内进行滑动,便于线束夹跟随电缆移动而移动,避免机器人在工作的过程的中,机器人带动电缆移动后,电缆受到线束夹的限制后,使得电缆可能无法跟随机器人工作而移动,提高线束夹夹持电缆的稳定性。
11、2、该机器人的线束支架设置有定位杆、插销和销槽,通过线束夹带动定位杆穿过线束夹后,再将插销插入在销槽内,从而便于将线束夹安装在安装板上,便于对线束夹进行安装,在对线束夹进行安装时,不再需要使用螺栓对线束夹进行安装,提高操作者安装线束夹的便捷性。
技术特征:
1.一种机器人的线束支架,包括挂耳(1)和线束夹(2),其特征在于:所述挂耳(1)中部固定有滑槽(3),且滑槽(3)中部内嵌有滑块(5),所述滑块(5)表面固定有转槽(7),且转槽(7)内嵌有转块(6),所述转块(6)末端固定有安装板(9),且安装板(9)表面卡扣连接有线束夹(2)。
2.根据权利要求1所述的一种机器人的线束支架,其特征在于:所述安装板(9)两侧端部皆固定有弹簧槽(12),且弹簧槽(12)中部皆贯穿有插销(14),所述插销(14)表面皆套设有第二弹簧(11),所述第二弹簧(11)两侧端部分别抵接在弹簧槽(12)内壁和限位块(13)表面之间,且限位块(13)皆固定在插销(14)上,所述插销(14)一侧端部皆固定有拉把(10),所述插销(14)末端皆套设有开设在定位杆(16)中部的销槽(15),所述定位杆(16)末端皆固定有贯穿安装板(9)的线束夹(2)。
3.根据权利要求1所述的一种机器人的线束支架,其特征在于:所述滑块(5)中部皆贯穿有固定在滑槽(3)内壁的滑杆(8),且滑杆(8)表面皆套设有第一弹簧(4),所述第一弹簧(4)两侧端部分别抵接在滑槽(3)内壁和滑块(5)表面之间。
4.根据权利要求3所述的一种机器人的线束支架,其特征在于:所述滑块(5)中部皆开设有圆孔,所述滑杆(8)皆设置为滑块(5)中部开设的圆孔相互匹配的圆柱形。
5.根据权利要求3所述的一种机器人的线束支架,其特征在于:所述第一弹簧(4)皆以滑块(5)为中心点对称套设在滑杆(8)表面,两组所述第一弹簧(4)的弹力相等。
6.根据权利要求2所述的一种机器人的线束支架,其特征在于:所述拉把(10)皆设置为“l”形,且拉把(10)表面皆开设有若干组波浪形凹槽。
7.根据权利要求2所述的一种机器人的线束支架,其特征在于:所述弹簧槽(12)两侧端部皆开设有矩形通孔,且限位块(13)两侧的宽度大于弹簧槽(12)两侧开设的矩形通孔内壁宽度。
技术总结
本技术公开了一种机器人的线束支架,属于线束支架技术领域,包括挂耳和线束夹,所述挂耳中部固定有滑槽,且滑槽中部内嵌有滑块,所述滑块表面固定有转槽,且转槽内嵌有转块,所述转块末端固定有安装板,且安装板表面卡扣连接有线束夹;机器人带动电缆移动后,电缆受到线束夹的限制后,使得电缆可能无法跟随机器人工作而移动,提高线束夹持电缆的稳定性,在对线束夹进行安装时,不再需要使用螺栓对线束夹进行安装,提高操作者安装线束夹的便捷性。
技术研发人员:张瑞
受保护的技术使用者:十堰兰岳汽车部件有限公司
技术研发日:20221201
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!