一种传感器自选系统的制作方法
本申请涉及机器人传感器检测领域,尤其涉及一种传感器自选系统及控制方法。
背景技术:
1、目前,电力巡检机器人由于体积与重量的限制,只能装载固定类型的传感器进行巡检任务,无法满足不同的巡检需求,现有方案采取配备多台电力巡检机器人或人工更换传感器的技术方案,配备多台电力巡检机器人会增加巡检系统的设备成本,而人工更换传感器则频繁占用人工,并降低作业效率。
技术实现思路
1、为了解决这一技术问题,本申请提供了一种传感器自选系统,该系统能够根据实际巡检需要实现自动选择并更换传感器。
2、为实现本申请的目的,本申请通过以下技术方案实现:
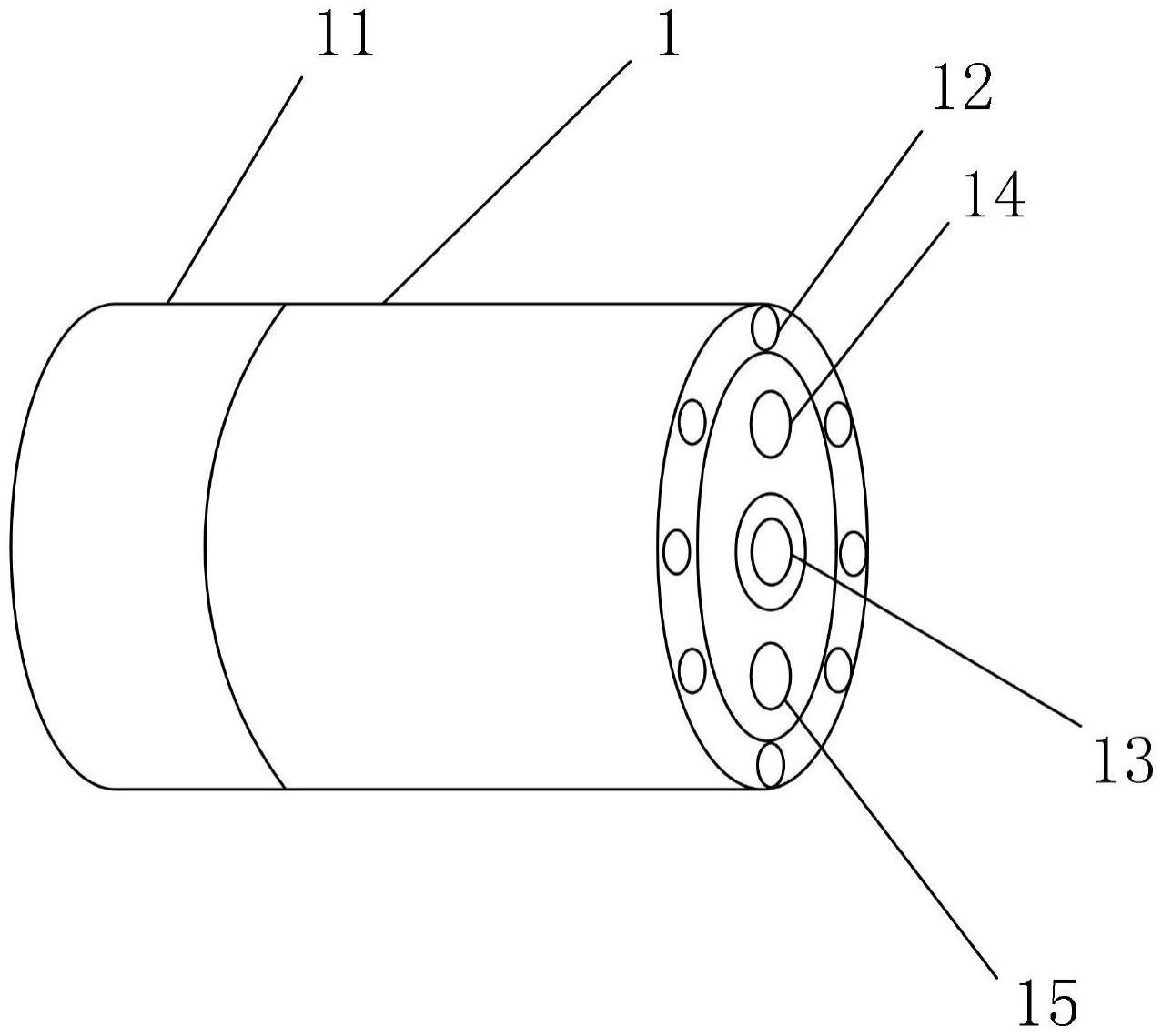
3、第一方面,本申请提供一种传感器自选系统,包括:设有移动模块、捕获模块的移动体,设有接口模块的多个传感器与根据捕获模块获取的位置信息控制移动模块移动的主控模块;
4、所述捕获模块包括:rfid定位传感器、电控自锁元件,设置在所述移动体的外壁,所述移动体的外壁包括所述移动体面向前进方向的外壁;所述接口模块包括:rfid标签、锁孔,设置在所述传感器的外壁,所述传感器的外壁包括面朝水平方向的外壁;
5、所述rfid标签具有唯一的rfid编码;所述rfid定位传感器用于获取所述rfid标签的位置信息;所述电控自锁元件用于自动伸入所述锁孔并卡合;所述主控模块设置在所述移动体的内部,并与所述捕获模块、接口模块、移动模块电连接。
6、可选的,所述接口模块与所述传感器可拆卸连接。
7、在一种可能的实现方式中,所述电控自锁元件包括:电控推杆、顶杆、顶球、球洞与顶块,设置于所述捕获模块中心且可伸出所述捕获模块的接口面;所述球洞直径小于所述顶球直径;所述电控推杆用于推动所述顶杆,所述顶杆用于顶压所述顶球与所述球洞卡合,所述顶块用于对顶球进行限位。
8、在一种可能的实现方式中,所述锁孔内部具有凸出部,用于卡合所述顶球伸出所述球洞的部分。
9、可选的,所述锁孔深度与所述电控自锁元件伸出捕获模块接口面的伸出端相等。
10、在一种可能的实现方式中,所述捕获模块还包括:设置于接口面的负压吸附器;所述接口模块还包括:设置于接口面的负压吸附面;所述负压吸附器用于与所述负压吸附面固定吸附连接。
11、在一种可能的实现方式中,所述捕获模块还包括:设置于接口面的第一电源端口;所述接口模块还包括:设置于接口面的第二电源端口;所述第一电源端口用于与所述第二电源端口连接,为所述传感器供电。
12、可选的,所述第一电源端口用于与第二电源端口连接为接触时建立供电连接。
13、可选的,所述rfid标签具有充电电池,所述第一电源端口与所述第二电源端口连接还用于给rfid标签充电。
14、在一种可能的实现方式中,所述捕获模块还包括:设置于接口面的第一通讯端口,所述接口模块还包括:设置于接口面的第二通讯端口;所述第一通讯端口用于与第二通讯端口连接,通过主控模块控制所述传感器。
15、可选的,所述第一通讯端口用于与第二通讯端口连接为接触时建立通信连接。
16、可选的,所述第二通讯端口具有第二通讯端口左端端口与第二通讯端口右端端口,所述第二通讯端口左端端口用于与第一通讯端口连接,所述第二通讯端口右端端口用于与传感器连接。
17、在一种可能的实现方式中,所述顶块与所述顶球的接触面上还设有滑动导向槽。
18、在一种可能的实现方式中,所述传感器包括:红外摄像头、气体传感器、超声波传感器、温湿度传感器。
19、在一种可能的实现方式中,所述移动体为移动机器人。
20、可选的,所述移动体为电力巡检机器人。
21、第二方面,本申请提供一种用于上述传感器自选系统的控制方法,包括:
22、根据巡检任务判断需要使用的传感器,获取预先设定的传感器对应rfid标签信息;
23、通过rfid定位传感器获取与所述rfid标签信息对应rfid标签的信号强度;
24、根据信号强度控制移动机器人移动到传感器接口模块前方;
25、指示负压吸附器启动吸附抓取接口模块;
26、控制电控自锁元件伸入锁孔;
27、指示电控推杆启动,顶球紧密卡合锁孔凸出部,实现自锁;
28、指示负压吸附器关闭;
29、通过第一电源端口与第二电源端口完成供电;
30、通过第一通讯端口与第二通讯端口对传感器完成初始化。
31、可选的,设有接口模块的传感器放置高度为捕获模块接口面与接口模块借口面等高。
32、本申请提供的技术方案的技术效果如下:
33、本申请所述的一种传感器自选系统,能够使电力巡检机器人根据实际巡检任务内容自动选择并装载需要的传感器,不需要设置多个装载不同传感器的电力巡检机器人降低设备建设成本,也避免频繁进行人工更换,降低人工成本提高作业效率。
技术特征:
1.一种传感器自选系统,其特征在于,包括:
2.根据权利要求1所述的传感器自选系统,其特征在于,所述电控自锁元件(13)包括:电控推杆(134)、顶杆(131)、顶球(132)、球洞(133)与顶块(135),设置于所述捕获模块(1)中心且可伸出所述捕获模块(1)的接口面;所述球洞(133)直径小于所述顶球(132)直径;所述电控推杆(134)用于推动所述顶杆(131),所述顶杆(131)用于顶压所述顶球(132)与所述球洞(133)卡合,所述顶块(135)用于对顶球(132)进行限位。
3.根据权利要求2所述的传感器自选系统,其特征在于,所述锁孔(23)内部具有凸出部(231),用于卡合所述顶球(132)伸出所述球洞(133)的部分。
4.根据权利要求1所述的传感器自选系统,其特征在于,所述捕获模块(1)还包括:设置于接口面的负压吸附器(12);所述接口模块(2)还包括:设置于接口面的负压吸附面(22);所述负压吸附器(12)用于与所述负压吸附面(22)固定吸附连接。
5.根据权利要求1所述的传感器自选系统,其特征在于,所述捕获模块(1)还包括:设置于接口面的第一电源端口(14);所述接口模块(2)还包括:设置于接口面的第二电源端口(24);所述第一电源端口(14)用于与所述第二电源端口(24)连接,为所述传感器(3)供电。
6.根据权利要求1所述的传感器自选系统,其特征在于,所述捕获模块(1)还包括:设置于接口面的第一通讯端口(15),所述接口模块(2)还包括:设置于接口面的第二通讯端口(25);所述第一通讯端口(15)用于与第二通讯端口(25)连接,通过主控模块控制所述传感器(3)。
7.根据权利要求2所述的传感器自选系统,其特征在于,所述顶块(135)与所述顶球(132)的接触面上还设有滑动导向槽。
8.根据权利要求1所述的传感器自选系统,其特征在于,所述传感器包括:红外摄像头、气体传感器、超声波传感器、温湿度传感器。
9.根据权利要求1-8中任一项所述的传感器自选系统,其特征在于,所述移动体为移动机器人。
技术总结
本申请提供了本申请提供一种传感器自选系统,包括:设有移动模块、捕获模块的移动体,设有接口模块的多个传感器与根据捕获模块获取的位置信息控制移动模块移动的主控模块,采用本申请提供传感器自选系统及控制方法能够能够根据实际巡检需要实现自动选择并更换传感器。
技术研发人员:张英旭,易里坤,王正通,周明,吴文琦,张子巍,王天一,刘奕辰
受保护的技术使用者:华能清能通榆电力有限公司
技术研发日:20221206
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!