电机和机器人的制作方法
本公开涉及电学,尤其涉及一种电机和机器人。
背景技术:
1、电机作为将电能转换为机械能的设备之一,在各领域应用广泛。在通电状态下,电机中定子的线圈内有电流通过,进而产生磁场,转子受该磁场的影响产生转动,实现电机的动力输出。在实际应用中往往希望在需要的时候限制电机的动力输出。因此,如何对电机进行锁定,使与电机的动力输出轴连接的执行部件保持在锁定前的位置,在实际应用中有重要作用。
技术实现思路
1、本公开提供一种电机和机器人。
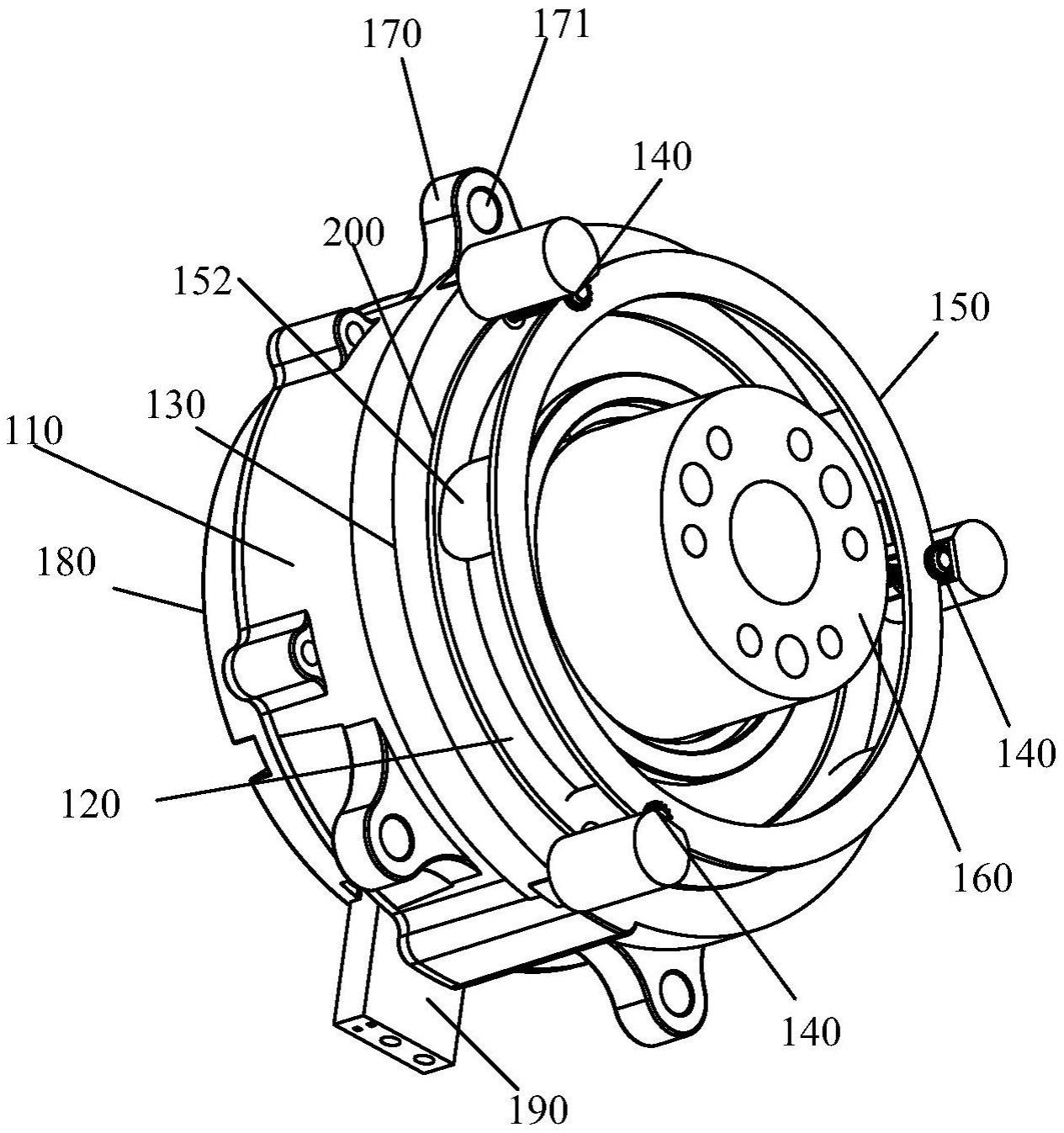
2、根据本公开第一方面实施例,提供了一种电机,所述电机包括:
3、壳体;
4、定子,安装在所述壳体上;
5、转子,与所述定子同轴设置;
6、丝杆组件,安装在所述壳体上;
7、锁刹件,具有导磁性,与所述丝杆组件连接;
8、所述丝杆组件驱动所述锁刹件至少具有:锁定位置和解锁位置;其中,所述锁定位置包括:所述锁刹件至少部分位于所述定子和所述转子之间的缝隙内,限制所述转子转动;所述解锁位置包括:所述锁刹件位于所述缝隙外,允许所述转子转动。
9、在一些实施例中,所述锁刹件包括:
10、支架部分,与所述丝杆组件连接;
11、锁刹部分,与所述支架部分连接,并朝向所述缝隙;
12、所述锁定位置包括:所述锁刹部分位于所述缝隙内;
13、所述解锁位置包括:所述锁刹部分位于所述缝隙外;
14、所述支架部分在所述锁定位置和所述解锁位置均位于所述缝隙外。
15、在一些实施例中,所述锁刹部分的数量为多个,多个所述锁刹部分间隔分布在所述支架部分上。
16、在一些实施例中,所述支架部分为环状,和/或,所述锁刹部分为片状。
17、在一些实施例中,所述转子位于所述定子的外侧。
18、在一些实施例中,所述电机还包括:
19、减速器,与所述定子同轴,并与所述转子连接。
20、在一些实施例中,所述电机还包括:
21、动力输出轴,安装在所述减速器上。
22、在一些实施例中,所述电机还包括:
23、控制器,安装在所述壳体上,并与所述减速器连接,至少用于控制所述减速器内的齿轮转动。
24、在一些实施例中,所述丝杆组件包括:
25、驱动马达,安装在所述壳体上;
26、丝杆,动力输入端与所述驱动马达连接,动力输出端与所述锁刹件连接。
27、根据本公开第二方面实施例,提供了一种机器人,所述机器人包括:第一方面实施例所述的电机。
28、本公开的实施例提供的技术方案可以包括以下有益效果:
29、由上述实施例可知,本公开通过在电机的转子和定子之间插入锁刹件,利用磁力限制转子的转动,使转子保持在锁定前的位置。应用在机器人中,这种电机能够实现机器人的静态位置保持。而且,这种利用磁力锁定转子的方式,无需额外的能量支撑,有利于节省能耗。
30、应当理解的是,以上的一般描述和后文的细节描述仅是示例性和解释性的,并不能限制本公开。
技术特征:
1.一种电机,其特征在于,所述电机包括:
2.根据权利要求1所述的电机,其特征在于,所述锁刹件包括:
3.根据权利要求2所述的电机,其特征在于,所述锁刹部分的数量为多个,多个所述锁刹部分间隔分布在所述支架部分上。
4.根据权利要求2所述的电机,其特征在于,所述支架部分为环状,和/或,所述锁刹部分为片状。
5.根据权利要求1所述的电机,其特征在于,所述转子位于所述定子的外侧。
6.根据权利要求1所述的电机,其特征在于,所述电机还包括:
7.根据权利要求6所述的电机,其特征在于,所述电机还包括:
8.根据权利要求6所述的电机,其特征在于,所述电机还包括:
9.根据权利要求1所述的电机,其特征在于,所述丝杆组件包括:驱动马达,安装在所述壳体上;
10.一种机器人,其特征在于,所述机器人包括:权利要求1至9任一项所述的电机。
技术总结
本公开提供了一种电机和机器人,所述电机包括:壳体;定子,安装在所述壳体上;转子,与所述定子同轴设置;丝杆组件,安装在所述壳体上;锁刹件,具有导磁性,与所述丝杆组件连接;所述丝杆组件驱动所述锁刹件至少具有:锁定位置和解锁位置;其中,所述锁定位置包括:所述锁刹件至少部分位于所述定子和所述转子之间的缝隙内,限制所述转子转动;所述解锁位置包括:所述锁刹件位于所述缝隙外,允许所述转子转动。应用在机器人中,本公开实施例的电机能够实现机器人的静态位置保持。
技术研发人员:陈篡修,苏昂
受保护的技术使用者:北京小米移动软件有限公司
技术研发日:20221209
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!