一种带电作业机器人用绝缘杆的制作方法
本技术涉及一种带电作业机器人用绝缘杆,属于电力设备。
背景技术:
1、为减少配电网停电时间,提高供电可靠性,配电网带电作业已成为最直接、最有效的方法。机器人手臂在带电作业时需要保证一定的绝缘强度,现有的方法是在机器人手臂的末端安装绝缘杆。但是绝缘杆的长度会增加机器人手臂的负载,如何保证有效绝缘长度的同时减少绝缘杆的长度是需要解决的问题;
2、同时绝缘杆的长度产生变化后,考虑绝缘的同时考虑依附的气管的设置也是需要解决的问题。
技术实现思路
1、针对上述现有技术存在的问题,本实用新型提供一种带电作业机器人用绝缘杆,机器人与末端工具之间通过气路连接,利用绝缘子的设置,将气管缠绕在绝缘杆表面,在保证绝缘性的同时也保证了气管的有效安装。
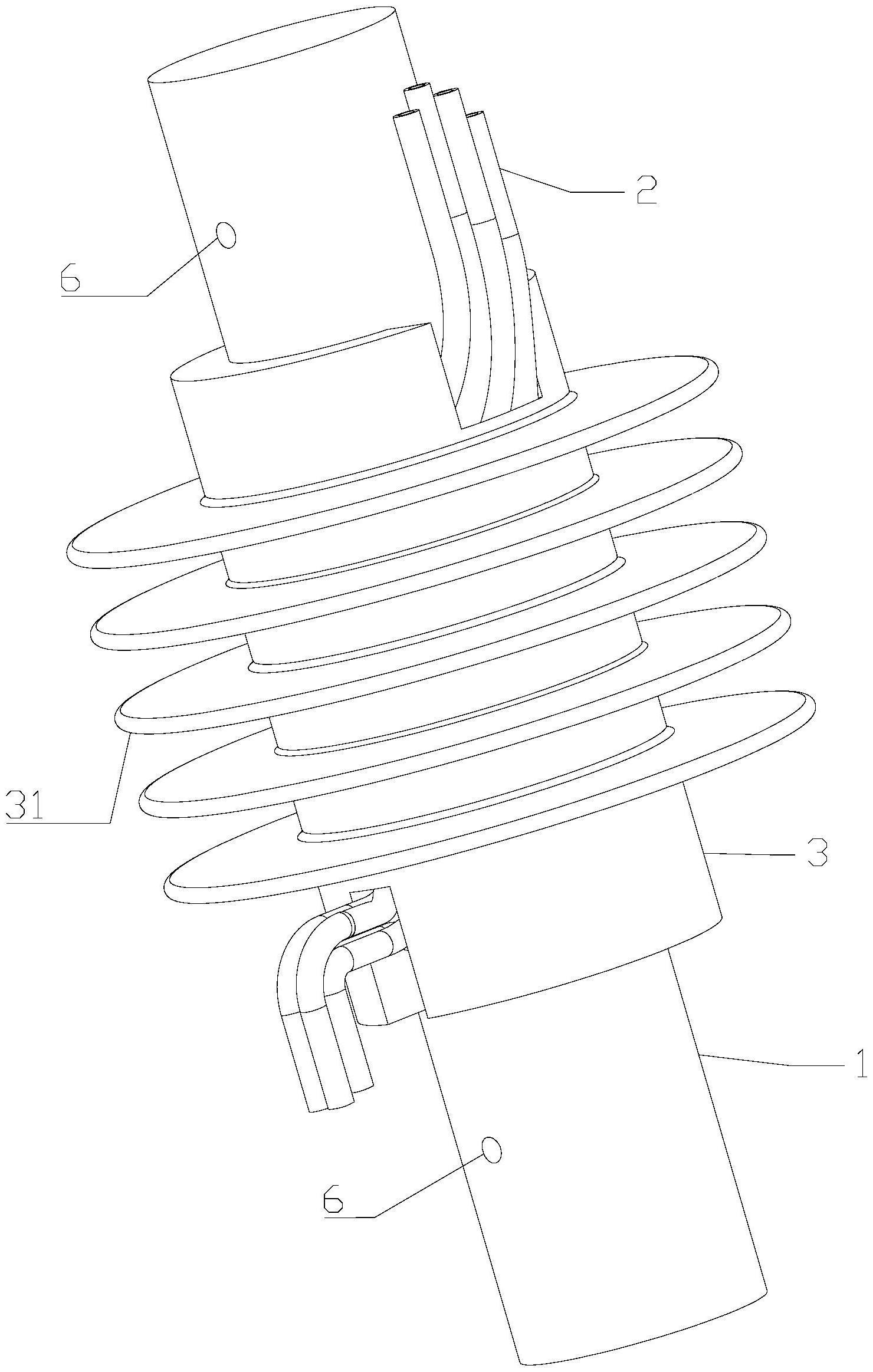
2、为了实现上述目的,本实用新型采用如下技术方案:一种带电作业机器人用绝缘杆,包括:
3、绝缘杆,所述绝缘杆安装在机器人手臂上;
4、绝缘子,所述绝缘子嵌套在所述绝缘杆上,且所述绝缘子上设置有裙边结构;
5、气管,所述气管缠绕在所述绝缘杆上,且缠绕的部分被所述绝缘子包覆,所述气管的两端分别从所述绝缘子的两端延伸出去。
6、优选的,所述气管有多个,所述绝缘子两端设有开口,所述气管从绝缘子开口处延伸出去。
7、优选的,所述裙边结构为多个环形结构。
8、优选的,位于所述绝缘子上的两个开口错位分布,且位于最外侧的两个环形结构均位于两个开口之间。
9、优选的,所述绝缘子为绝缘橡胶。
10、优选的,所述绝缘杆的一端固定在机器人手臂上,所述绝缘杆的另一端安装有快换装置;
11、所述气管的一端通过机器人手臂连接至气源处,所述气管的另一端与快换装置连接。
12、与现有技术相比,本实用新型采用具有裙边结构的绝缘子,在保证有效绝缘长度的同时减少绝缘杆的长度,能够增大爬电距离;有利于充分发挥机器人手臂的负载能力;
13、另外将绝缘子与绝缘杆的结合,使得气管得到有效的安装,并且也保证了绝缘性。
技术特征:
1.一种带电作业机器人用绝缘杆,其特征在于,包括:
2.根据权利要求1所述的一种带电作业机器人用绝缘杆,其特征在于,所述气管有多个,所述绝缘子两端设有开口,所述气管从绝缘子开口处延伸出去。
3.根据权利要求2所述的一种带电作业机器人用绝缘杆,其特征在于,所述裙边结构为多个环形结构。
4.根据权利要求3所述的一种带电作业机器人用绝缘杆,其特征在于,位于所述绝缘子上的两个开口错位分布,且位于最外侧的两个环形结构均位于两个开口之间。
5.根据权利要求1所述的一种带电作业机器人用绝缘杆,其特征在于,所述绝缘子为绝缘橡胶。
6.根据权利要求1所述的一种带电作业机器人用绝缘杆,其特征在于,所述绝缘杆的一端固定在机器人手臂上,所述绝缘杆的另一端安装有快换装置;
技术总结
本技术公开了一种带电作业机器人用绝缘杆,包括绝缘杆、绝缘子和气管,绝缘杆安装在机器人手臂上;绝缘子嵌套在所述绝缘杆上,且绝缘子上设置有裙边结构;气管缠绕在所述绝缘杆上,且缠绕的部分被所述绝缘子包覆,气管的两端分别从所述绝缘子的两端延伸出去。本技术采用裙边结构的绝缘子,在保证有效绝缘长度的同时减少绝缘杆的长度,能够增大爬电距离;有利于充分发挥机器人手臂的负载能力;另外,将绝缘子与绝缘杆的结合,使得气管得到有效的安装,并且也保证了绝缘性。
技术研发人员:衣晓波,梁好
受保护的技术使用者:南京汉启智能科技有限公司
技术研发日:20221212
技术公布日:2024/1/11
- 还没有人留言评论。精彩留言会获得点赞!