一种压电马达对焦模组的制作方法
本技术涉及压电马达相关,具体为一种压电马达对焦模组。
背景技术:
1、升级摄像头的工作原理大致为:景物通过镜头生成的光学图像投射到图像传感器表面上,然后转为电信号,经过模数转换后变为数字图像信号,再送到数字信号处理芯片中加工处理,再通过i0接口传到电脑或手机屏幕上,即可得到图像。
2、目前常见的手机压电马达模组主要包括有外壳、上弹片、镜头载体、盘绕镜头载体的线圈、下簧片以及底座,镜片载体的周侧设置有磁铁组以产生磁场,镜头载体由上弹片和下弹片悬挂在外壳和底座之间,当线圈通电时产生电磁力,带动镜头载体以及其上的镜头沿着光轴方向来回运动以实现对焦功能,这种手机压电马达模组的结构偏于复杂,当中需要使用的零件繁多,控制精度较低,对生产工艺要求比较高,因此从加工方面和组装方面来说都存在不小的难度。
3、因此,现需一种控制精度高,同时推力大、运动行程大的手机压电马达模组。
技术实现思路
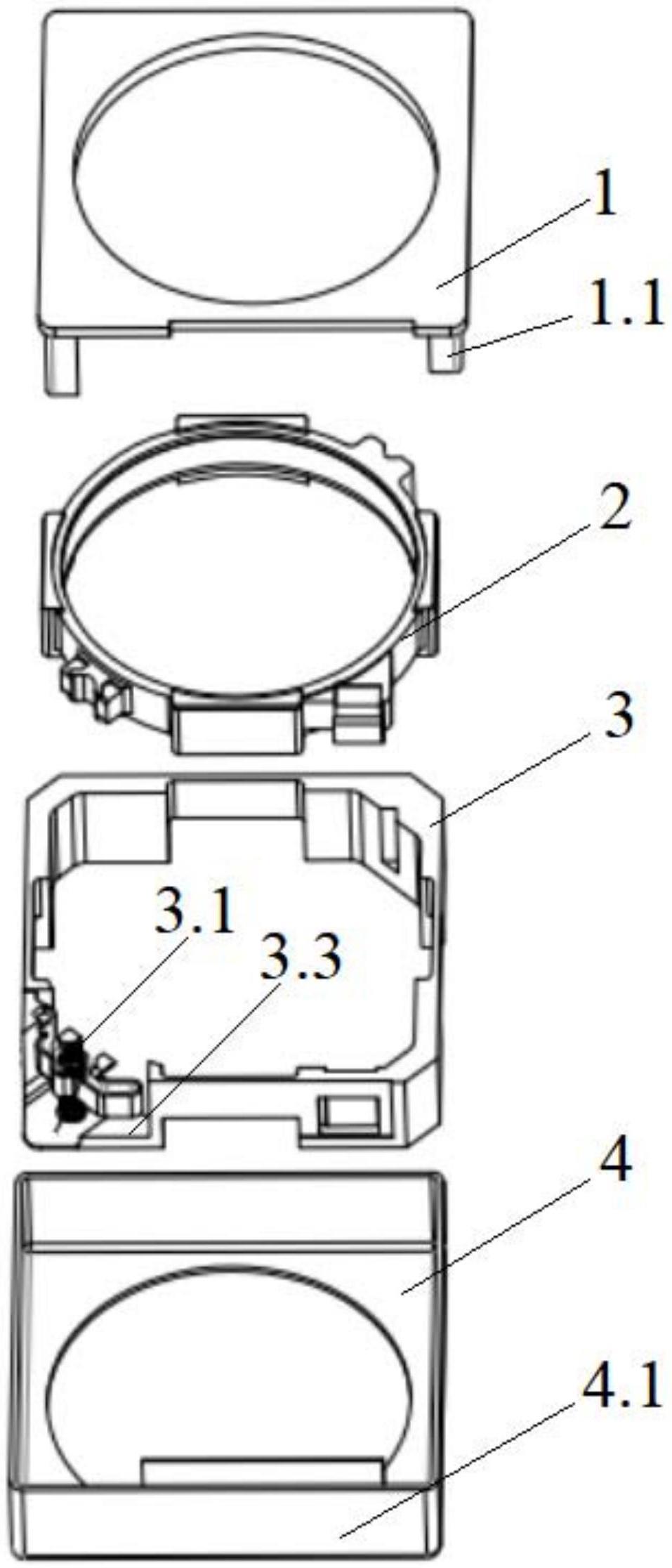
1、为解决现有的技术问题。本实用新型提供了一种压电马达对焦模组,包括:上盖、载体、压电载体、多层压电陶瓷、压电摩擦头、导向组件和底盒;所述上盖的周围设置有至少两个定位柱,所述底盒周围设置有与所述定位柱互相匹配的定位框;所述上盖与所述底盒形成容纳腔,所述压电载体、多层压电陶瓷、压电摩擦头、导向组件设置于所述容纳腔内部;所述多层压电陶瓷的底端与所述压电载体固定连接,所述压电摩擦头固定于所述多层压电陶瓷的上方,所述导向组件设置于所述多层压电陶瓷外部,用于限制所述多层压电陶瓷沿x轴方向伸缩振动。
2、优选或可选的,还包括控制电路,用于驱使所述压电载体、多层压电陶瓷、压电摩擦头、导向组件沿x轴方向平移。
3、优选或可选的,所述压电摩擦头为球径0.5~1.3微米的球形氧化锆。
4、优选或可选的,所述多层压电陶瓷通过20~60层厚度15~17微米的的陶瓷堆叠烧结制得。还包括至少一个用于轴承传导的滚珠,所述滚珠设置于所述多层压电陶瓷的侧面。
5、有益效果:本实用提供了一种压电马达对焦模组,通过多层压电陶瓷的伸缩运动,带动压电摩擦头所接触的金属弹片进行微米级的精确移动,可实现对焦和防抖的功能。本实用新型的多层压电陶瓷层数多,通过多层压电陶瓷不同区域的信号输入,可实现多层压电陶瓷x方向伸缩振动,带动摩擦头实现微米级移动,从而改变焦距以达到理想的对焦效果。与现有技术性比较,本实用新型的压电马达对焦模组零件设计更为简单、绕线工艺更为简洁,具有推力大、运动行程大及控制精度高的优点。
技术特征:
1.一种压电马达对焦模组,其特征在于,包括:上盖、载体、压电载体、多层压电陶瓷、压电摩擦头、导向组件和底盒;所述上盖的周围设置有至少两个定位柱,所述底盒周围设置有与所述定位柱互相匹配的定位框;所述上盖与所述底盒形成容纳腔,所述压电载体、多层压电陶瓷、压电摩擦头、导向组件设置于所述容纳腔内部;所述多层压电陶瓷的底端与所述压电载体固定连接,所述压电摩擦头固定于所述多层压电陶瓷的上方,所述导向组件设置于所述多层压电陶瓷外部。
2.根据权利要求1所述的压电马达对焦模组,其特征在于,还包括控制电路,用于驱使所述压电载体、多层压电陶瓷、压电摩擦头、导向组件沿x轴方向平移。
3.根据权利要求1所述的压电马达对焦模组,其特征在于,所述压电摩擦头为球径0.5~1.3微米的球形氧化锆。
4.根据权利要求1所述的压电马达对焦模组,其特征在于,所述多层压电陶瓷通过20~60层厚度15~17微米的陶瓷堆叠烧结制得。
5.根据权利要求1所述的压电马达对焦模组,其特征在于,所述导向组件用于限制所述多层压电陶瓷沿x轴方向伸缩振动。
6.根据权利要求1所述的压电马达对焦模组,其特征在于,还包括至少一个用于轴承传导的滚珠。
7.根据权利要求6所述的压电马达对焦模组,其特征在于,所述滚珠设置于所述多层压电陶瓷的侧面。
技术总结
本技术公开了一种压电马达对焦模组,属于压电马达相关技术领域。本技术压电马达对焦模组包括上盖、载体、压电载体、多层压电陶瓷、压电摩擦头、导向组件和底盒;上盖的周围设置有至少两个定位柱,底盒周围设置有与定位柱互相匹配的定位框;压电载体、多层压电陶瓷、压电摩擦头、导向组件设置于上盖与底盒的内部;多层压电陶瓷的底端与压电载体固定连接,压电摩擦头固定于多层压电陶瓷的上方,导向组件设置于多层压电陶瓷外部,用于限制多层压电陶瓷沿x轴方向伸缩振动,多层压电陶瓷通过20~60层厚度15~17微米的的陶瓷堆叠烧结制得。本技术的压电马达对焦模组零件设计更为简单、绕线工艺更为简洁,推力大、运动行程大及控制精度高。
技术研发人员:于东方,张秀琴,高峰,徐一丹,吴逸飞
受保护的技术使用者:江苏波速传感器有限公司
技术研发日:20221230
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!