光伏清洗桥接装置的制作方法
本技术涉及光伏清扫机器人,具体是涉及一种光伏清洗桥接装置。
背景技术:
1、目前光伏跟踪支架的桥接轨道,主要有硬连接和脱开连接两大类。硬连接的桥接轨道,在光伏跟踪之间出现故障时,需要第一时间关闭前后所有的跟踪支架的跟踪运行,稍有延迟,易造成成排的光伏跟踪支架损伤;脱开的桥接轨道,在轨道分离后,需要进行人工恢复,这样,就需要配备大量的运维人员,时时监测光伏跟踪支架的运行情况,且光伏跟踪支架的信息反馈应做到实时且准确,当不能及时反馈光伏跟踪支架的信息,清扫机器人进行清扫运动后,将在脱开处掉落,造成清扫机器人损坏。
2、中国专利cn111147011b公开了一种用于光伏跟踪支架的清扫机器人桥接轨道,涉及光伏跟踪支架清扫机器人的应用领域,包含第一支撑横梁、第一滑动套管组合、第一固定铰链组合、第一旋转铰链组合,第二支撑横梁、第二滑动套管组合、第二固定铰链组合、第二旋转铰链组合。
3、该设备在使用时,两端的滑动套管扭转角度较大,清扫机器人直接通过时倾斜可能导致一端与轨道分离,且对桥接轨道的压力过大,容易造成弯曲影响轨道的功能。
技术实现思路
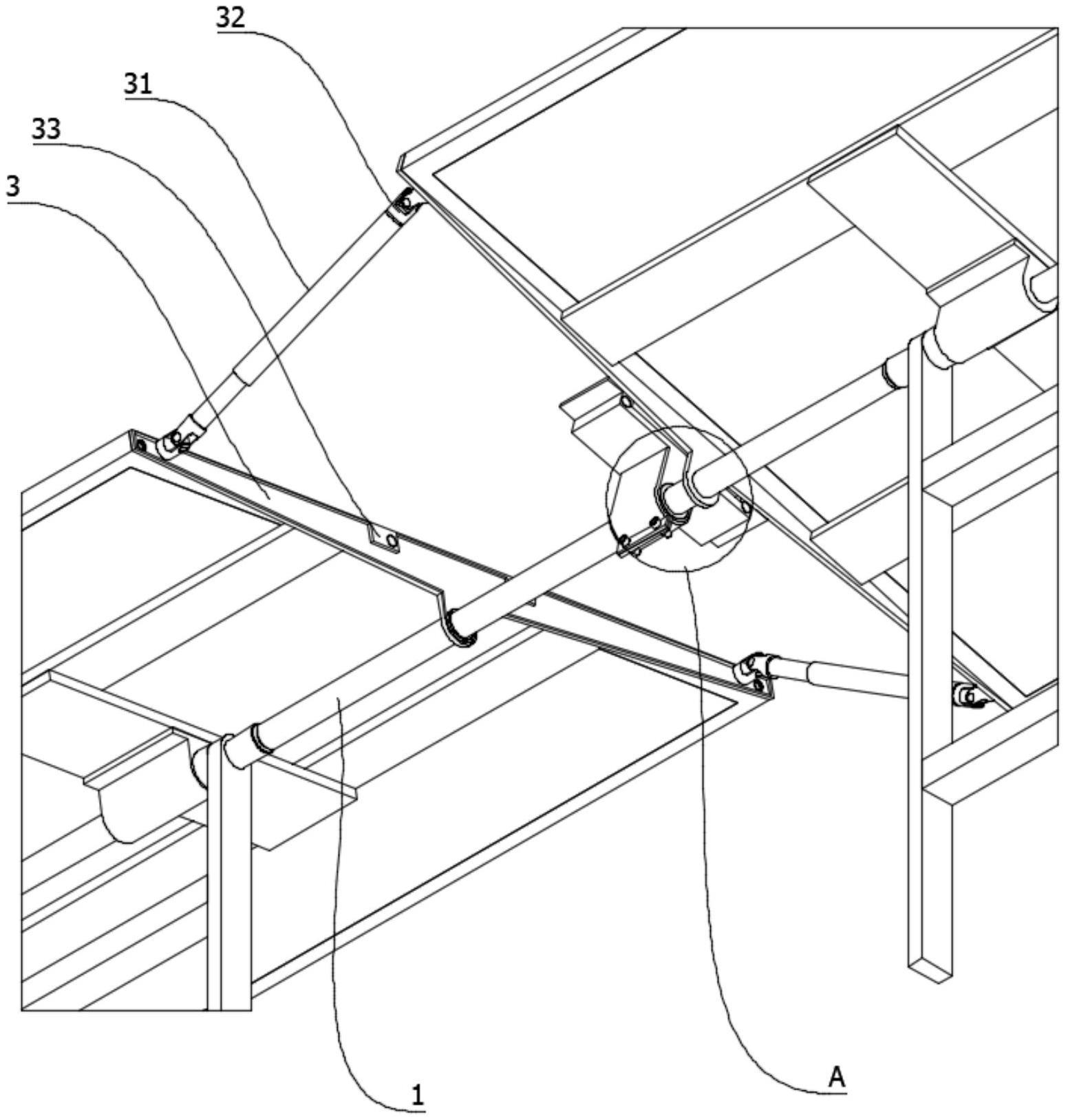
1、针对上述问题,提供了一种光伏清洗桥接装置。通过连接两侧光伏支架的伸缩杆组成桥接轨道,套设在固定轴杆上的支撑座在光伏清洁机器人移动时对光伏清洁机器人底部中部进行支撑,将光伏清洁机器人对伸缩杆的压力转移至固定轴杆上,对伸缩杆进行保护。
2、根据本公开的一个方面,提供了一种光伏清洗桥接装置,包括对相邻的两个光伏支架进行水平连接的固定轴杆,所述固定轴杆滑动安装有支撑座,所述支撑座位于光伏清洁机器人的中部并且跟随光伏清洁机器人移动,所述支撑座对所述光伏机器人进行支撑;
3、其中,所述固定轴杆上转动安装有两个调节板,所述两个调节板分别贴合至相邻两个光伏支架相对的一侧,所述两个调节板之间通过至少一个伸缩杆连接,所述至少一个伸缩杆的两端通过万向节分别铰接至所述两个调节板,所述光伏清洁机器人配置成能够沿所述伸缩杆从一个光伏支架向另一个光伏支架移动,并且所述支撑座跟随所述光伏清洁机器人移动发生倾斜。
4、根据本公开至少一个实施方式的光伏清洗桥接装置,所述固定轴杆的旋转轴与所述光伏支架的旋转轴处于同一直线上,所述支撑座套设在所述固定轴杆上,所述支撑座与所述固定轴杆的连接位置同轴设置有旋转轴承。
5、根据本公开至少一个实施方式的光伏清洗桥接装置,所述伸缩杆的上表面与所述光伏支架的表面处于同一水平高度。
6、根据本公开至少一个实施方式的光伏清洗桥接装置,所述支撑座设置两个支撑脚,所述两个支撑脚位于支撑座的旋转轴两侧,所述两个支撑脚的上表面与所述光伏支架的上表面处于同一平面。
7、根据本公开至少一个实施方式的光伏清洗桥接装置,所述支撑脚的上侧设置有第一吸附磁铁,所述支撑座通过所述第一吸附磁铁吸附所述光伏清洁机器人的底部。
8、根据本公开至少一个实施方式的光伏清洗桥接装置,所述调节板的一侧设置有对接块,所述对接块朝向所述支撑座的一侧设置有至少一个第三吸附磁铁;
9、所述支撑座朝向调节板的两侧分别设置有第二吸附磁铁,所述第二吸附磁铁与所述第三吸附磁铁吸附以保持所述支撑座贴合调节板。
技术特征:
1.一种光伏清洗桥接装置,其特征在于,包括对相邻的两个光伏支架进行水平连接的固定轴杆,所述固定轴杆滑动安装有支撑座,所述支撑座位于光伏清洁机器人的中部并且跟随光伏清洁机器人移动,所述支撑座对所述光伏清洁机器人进行支撑;
2.根据权利要求1所述的光伏清洗桥接装置,其特征在于,所述固定轴杆的旋转轴与所述光伏支架的旋转轴处于同一直线上,所述支撑座套设在所述固定轴杆上,所述支撑座与所述固定轴杆的连接位置同轴设置有旋转轴承。
3.根据权利要求2所述的光伏清洗桥接装置,其特征在于,所述伸缩杆的上表面与所述光伏支架的表面处于同一水平高度。
4.根据权利要求3所述的光伏清洗桥接装置,其特征在于,所述支撑座设置两个支撑脚,所述两个支撑脚位于支撑座的旋转轴两侧,所述两个支撑脚的上表面与所述光伏支架的上表面处于同一平面。
5.根据权利要求4所述的光伏清洗桥接装置,其特征在于,所述支撑脚的上侧设置有第一吸附磁铁,所述支撑座通过所述第一吸附磁铁吸附所述光伏清洁机器人的底部。
6.根据权利要求5所述的光伏清洗桥接装置,其特征在于,所述调节板的一侧设置有对接块,所述对接块朝向所述支撑座的一侧设置有至少一个第三吸附磁铁;
技术总结
本技术提供了一种光伏清洗桥接装置,包括对相邻的两个光伏支架进行水平连接的固定轴杆,所述固定轴杆滑动安装有支撑座,所述支撑座位于光伏清洁机器人的中部并且跟随光伏清洁机器人移动,所述支撑座对所述光伏机器人进行支撑;其中,所述固定轴杆上转动安装有两个调节板,所述两个调节板分别贴合至相邻两个光伏支架相对的一侧,所述两个调节板之间通过至少一个伸缩杆连接,所述至少一个伸缩杆的两端通过万向节分别铰接至所述两个调节板,所述光伏清洁机器人配置成能够沿所述伸缩杆从一个光伏支架向另一个光伏支架移动,并且所述支撑座跟随所述光伏清洁机器人移动发生倾斜。
技术研发人员:孟庆超,梁帅,张军,纪伟
受保护的技术使用者:北京京能国际控股有限公司华北分公司
技术研发日:20221230
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!