同步电动机的驱动装置和同步电动机的驱动方法与流程
本发明涉及对同步电动机进行驱动控制的驱动装置的结构及其控制,特别涉及有效应用于要求高响应性和高可靠性的汽车的电动制动用电动机的技术。
背景技术:
1、近年来,汽车的转向和制动装置等辅助机器类部件的电动化正在进展。通过辅助机器类部件的电动化,能够排除现有的液压系统,所以期待维护性提高和汽车的可操作性/可控性提高。这样的电动化辅助机器中,一般用逆变器等电力转换装置将辅助机器用电池的直流电功率转换为交流电功率,通过驱动同步电动机而使转向和制动等的致动器工作。
2、使转向和制动等汽车的重要部件电动化的情况下,为了能够在同步电动机和逆变器等电气部件中发生故障时也能够继续运转,而要求冗余化的结构。例如,使电动机从现有的三相绕组改为多重三相绕组,使逆变器也多重化,由此成为即使发生故障也继续运转的结构。
3、然而,能够从辅助机器用电池提供的电力具有限度,存在根据车辆设计决定转向和制动中消耗的电力的情况。这样的情况下,有时为了使从辅助机器用电池输出的直流电流不超过限制值而实施对策。
4、作为该对策,例如存在如专利文献1所述,设置检测直流电流的传感器,在直流电流超过限制值的情况下,降低逆变器输出而限制直流电流的输出的方法。
5、现有技术文献
6、专利文献
7、专利文献1:日本特开2012-175770号公报
技术实现思路
1、发明要解决的课题
2、上述专利文献1中,公开了通过使用传感器等检测电池状态,基于该电池状态控制同步电动机,来进行电池的电力分配的技术。
3、然而,因为需要传感器和硬件滤波器等追加结构,所以存在导致成本增大和装置大型化的风险。
4、另外,上述多重绕组的结构中,需要对各个绕组系统设置传感器,所以进一步导致成本增大。
5、防止成本增大并限制直流电流的一种方法中,作为一般公知的技术,存在根据逆变器的输出电压和输出电流运算有效电功率、对有效电功率除以电池电压而求出直流电流的方法。
6、但是,因为没有考虑逆变器的效率,所以产生直流电流的推算误差,存在不能适当地推算而超过限制值的可能性。
7、于是,本发明的目的在于提供一种不需要专用的电流检测用传感器等追加结构而能够进行高精度的直流电流的推算和限制的、可靠性高的同步电动机的驱动装置和使用它的同步电动机的驱动方法。
8、用于解决课题的技术方案
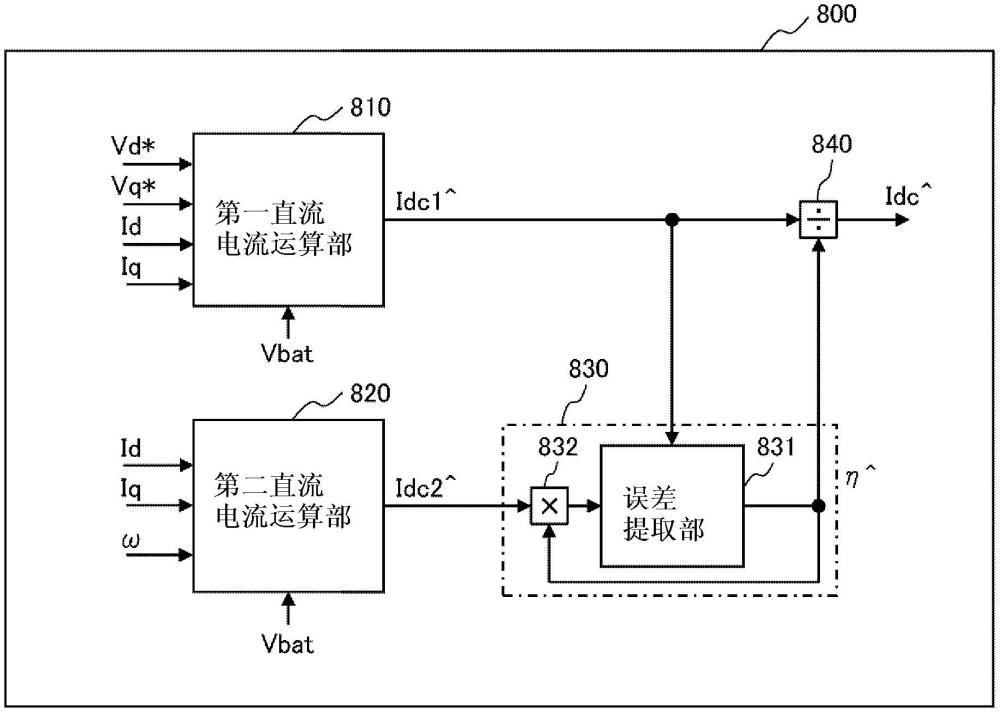
9、为了解决上述课题,本发明特征在于,包括:第一直流电流运算部,其基于第一电压指令值、同步电动机的绕组的电流值和电池电压来运算第一直流电流;第二直流电流运算部,其基于所述同步电动机的绕组的电流值、所述同步电动机的转速和所述同步电动机的规定的电动机特性来运算第二直流电流;模型误差提取部,其基于所述第一直流电流和所述第二直流电流来运算逆变器效率;直流电流修正部,其基于所述第一直流电流、所述第二直流电流和所述逆变器效率来运算推算直流电流;和直流电流限制部,其基于所述推算直流电流和预先决定的直流电流限制值来修正所述绕组的电流指令值。
10、另外,本发明特征在于,包括:(a)基于第一电压指令值、同步电动机的绕组的电流值和电池电压来运算第一直流电流的步骤;(b)基于所述同步电动机的绕组的电流值、所述同步电动机的转速和所述同步电动机的规定的电动机特性来运算第二直流电流的步骤;(c)基于所述第一直流电流和所述第二直流电流来运算逆变器效率的步骤;(d)基于所述第一直流电流、所述第二直流电流和所述逆变器效率来运算推算直流电流的步骤;(e)基于所述推算直流电流和预先决定的直流电流限制值来修正所述绕组的电流指令值的步骤。
11、发明的效果
12、根据本发明,能够实现一种不需要专用的电流检测用传感器等追加结构而能够进行高精度的直流电流的推算和限制的、可靠性高的同步电动机的驱动装置和使用它的同步电动机的驱动方法。
13、由此,能够抑制成本增大并有助于提高同步电动机和搭载它的汽车用电动制动的可靠性。
14、上述以外的课题、结构和效果将通过以下实施方式的说明而说明。
技术特征:
1.一种同步电动机的驱动装置,其特征在于,包括:
2.如权利要求1所述的同步电动机的驱动装置,其特征在于:
3.如权利要求1所述的同步电动机的驱动装置,其特征在于,具有:
4.如权利要求1所述的同步电动机的驱动装置,其特征在于:
5.如权利要求4所述的同步电动机的驱动装置,其特征在于:
6.一种同步电动机的驱动方法,其特征在于,包括以下步骤:
7.如权利要求6所述的同步电动机的驱动方法,其特征在于:
8.如权利要求6所述的同步电动机的驱动方法,其特征在于:
技术总结
本发明提供一种不需要专用的电流检测用传感器等追加结构而能够进行高精度的直流电流的推算和限制的、可靠性高的同步电动机的驱动装置。特征在于,包括:第一直流电流运算部,其基于第一电压指令值、同步电动机的绕组的电流值和电池电压来运算第一直流电流;第二直流电流运算部,其基于所述同步电动机的绕组的电流值、所述同步电动机的转速和所述同步电动机的规定的电动机特性来运算第二直流电流;模型误差提取部,其基于所述第一直流电流和所述第二直流电流来运算逆变器效率;直流电流修正部,其基于所述第一直流电流、所述第二直流电流和所述逆变器效率来运算推算直流电流;和直流电流限制部,其基于所述推算直流电流和预先决定的直流电流限制值来修正所述绕组的电流指令值。
技术研发人员:佐藤弘明,后藤大辅,岩崎克也
受保护的技术使用者:日立安斯泰莫株式会社
技术研发日:
技术公布日:2024/2/25
- 还没有人留言评论。精彩留言会获得点赞!