马达的控制装置以及马达的控制方法与流程
本发明涉及通过速度反馈控制而旋转驱动具备对旋转角度进行限制的限位器(stopper)的旋转体的、马达的控制装置及其控制方法。
背景技术:
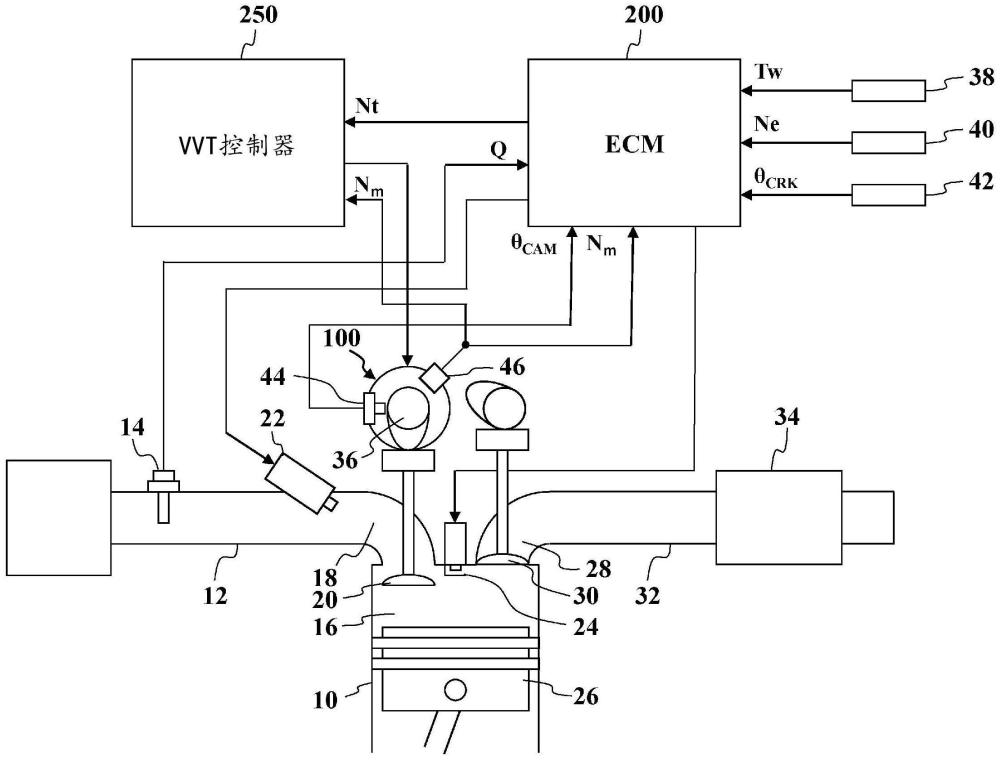
1、作为具备对由马达旋转驱动的旋转体的旋转角度进行限制的机械式的限位器的控制对象设备的一例,已知特开2018-123716号公报(专利文献1)所记载的那样的可变气门正时(vvt;variable valve timing)机构。在vvt机构中,通过马达改变凸轮轴(camshaft)相对于曲轴(crankshaft)的相对旋转角度,由此变更进气阀以及排气阀的至少一者的气门正时。
2、现有技术文献
3、专利文献
4、专利文献1:特开2018-123716号公报
技术实现思路
1、发明要解决的课题
2、在具备限位器的vvt机构的控制中,例如,将气门正时的基准角度的学习等作为目的,执行将由马达旋转驱动的旋转体按压在机械式的限位器上的处理。在执行该学习处理时,若基准角度的学习精度不充分,则尽管旋转体被按压在限位器上,但无法判断该情况而仍要将旋转体旋转驱动到目标角度,从而向电动马达供给过大的电流。
3、因此,本发明目的在于,提供在由机械式的限位器限制旋转体的旋转角度的状态下,使得不向通过速度反馈控制而旋转驱动旋转体的马达供给过大的电流的马达控制装置以及马达控制方法。
4、用于解决课题的手段
5、马达的控制装置通过速度反馈控制而旋转驱动具备对旋转角度进行限制的限位器的旋转体。此时,马达的控制装置在马达的目标旋转速度与其实际旋转速度的偏差的绝对值变成了规定范围内的状态持续了规定时间时,限制向马达供给的电流。
6、发明的效果
7、根据本发明,能够在由机械式的限位器限制了旋转体的旋转角度的状态下,使得不向通过速度反馈控制而旋转驱动旋转体的马达供给过大的电流。
技术特征:
1.一种马达的控制装置,其是通过速度反馈控制而旋转驱动具备对旋转角度进行限制的限位器的旋转体的马达的控制装置,
2.如权利要求1所述的马达的控制装置,其中,
3.如权利要求1所述的马达的控制装置,其中,
4.如权利要求3所述的马达的控制装置,其中,
5.如权利要求4所述的马达的控制装置,其中,
6.如权利要求4所述的马达的控制装置,其中,
7.如权利要求6所述的马达的控制装置,其中,
8.如权利要求3所述的马达的控制装置,其中,
9.如权利要求3所述的马达的控制装置,其中,
10.一种马达的控制方法,
11.如权利要求10所述的马达的控制方法,其中,
12.如权利要求10所述的马达的控制方法,其中,
13.如权利要求12所述的马达的控制方法,其中,
14.如权利要求13所述的马达的控制方法,其中,
15.如权利要求13所述的马达的控制方法,其中,
技术总结
VVT控制器的微型计算机通过速度反馈控制而旋转驱动具备对旋转角度进行限制的限位器的VVT机构的电动马达。此时,VVT控制器的微型计算机在电动马达的目标旋转速度与其实际旋转速度的偏差的绝对值变成了规定范围内的状态持续了规定时间时,判定为通过限位器而旋转体的旋转角度被限制。而且,VVT控制器的微型计算机若判定为通过限位器而旋转体的旋转角度被限制,则限制向电动马达供给的电流。
技术研发人员:实石真,羽野诚己
受保护的技术使用者:日立安斯泰莫株式会社
技术研发日:
技术公布日:2024/4/29
- 还没有人留言评论。精彩留言会获得点赞!