基于磁编码器的永磁同步电机初始位置校准方法与流程
本发明涉及电机驱动控制,特别涉及一种基于磁编码器的永磁同步电机初始位置校准方法。
背景技术:
1、随着永磁材料技术的发展、电力电子和驱动装置技术的进步,永磁同步电机目前广泛应用于工业制造、航空航天、机器人等领域。永磁同步电机一般采用转子磁场定向控制,转子实时位置信息是实现永磁同步电机精确控制的前提条件,目前多采用光电编码器或者旋转变压器来采集位置信息,其体积较大,成本较高。磁编码器具有体积小、成本低的显著优势,但受安装精度的影响,磁编码器反馈的位置角度存在一定误差,导致控制电机旋转时所输入的电角度与电机旋转至所需位置时的实际电角度之间存在偏差。现有永磁同步电机初始位置校准方法难以消除由于安装精度问题所导致的磁编码器反馈的转子位置不准问题,影响永磁同步电机控制精度。
技术实现思路
1、针对现有技术存在的问题,本发明的目的在于提供一种能够消除电机旋转时机械摩擦、齿槽转矩效应以及磁编码安装精度对编码器反馈位置影响,避免编码器反馈永磁同步电机转子位置不准问题的永磁同步电机初始位置校准方法及装置。
2、为实现上述目的,本发明的第一方面提供一种基于磁编码器的永磁同步电机初始位置校准方法,包括如下步骤:
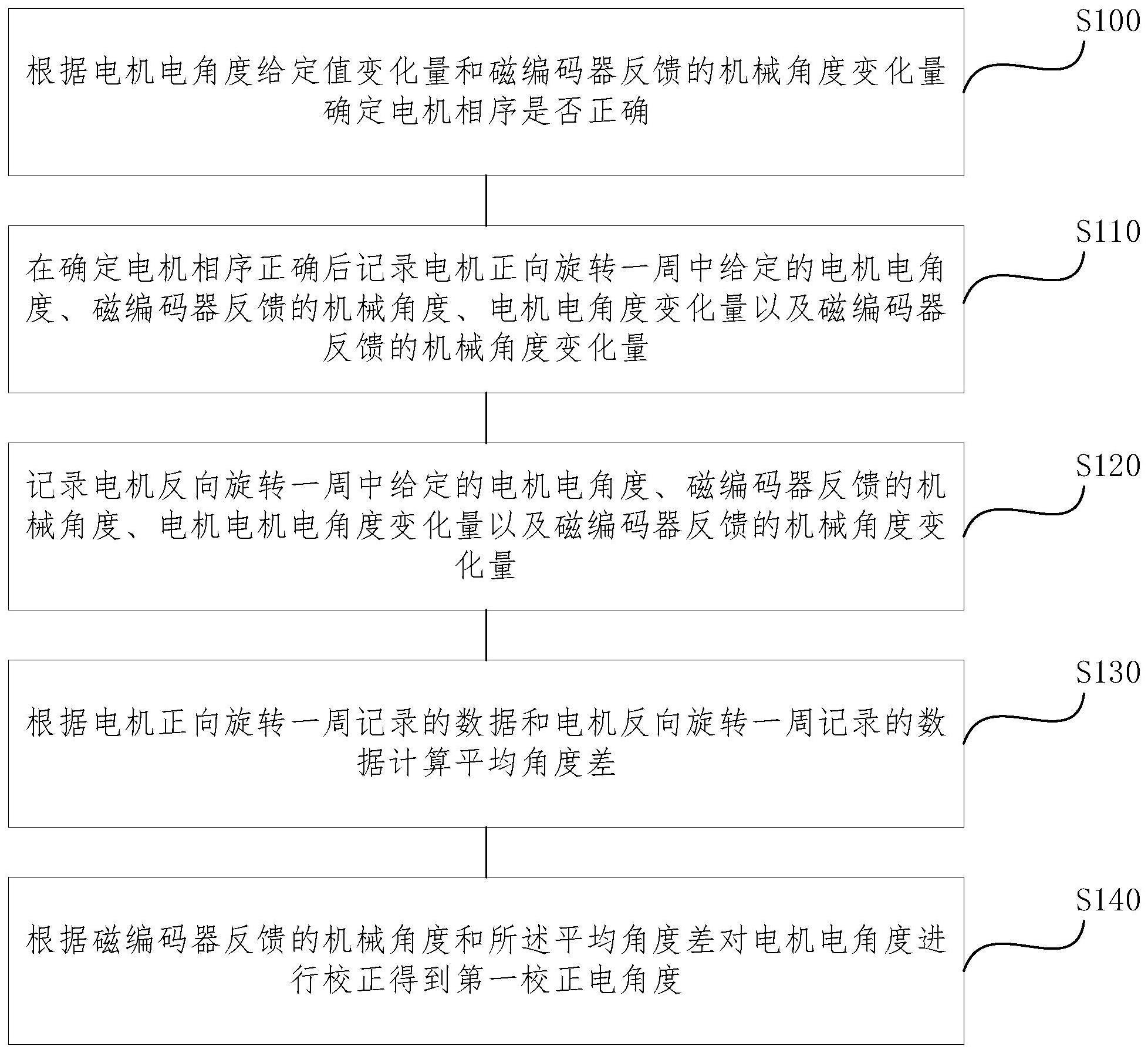
3、根据电机电角度给定值变化量和磁编码器反馈的机械角度变化量确定电机相序是否正确;
4、在确定电机相序正确后记录电机正向旋转一周中给定的电机电角度、磁编码器反馈的机械角度、电机电角度变化量以及磁编码器反馈的机械角度变化量;
5、记录电机反向旋转一周中给定的电机电角度、磁编码器反馈的机械角度、电机电机电角度变化量以及磁编码器反馈的机械角度变化量;
6、根据电机正向旋转一周记录的数据和电机反向旋转一周记录的数据计算平均角度差;
7、根据磁编码器反馈的机械角度和所述平均角度差对电机电角度进行校正得到第一校正电角度。
8、进一步,还包括:
9、对校正后的所述第一校正电角度进行滑动平均滤波得到第二校正电角度。
10、进一步,还包括:
11、对校正后的所述第二校正电角度采用电机正向旋转一周记录的数据和电机反向旋转一周记录的数据进行校正得到第三校正电角度。
12、进一步,记录电机正向旋转一周中给定的电机电角度、磁编码器反馈的机械角度、电机电角度变化量以及磁编码器反馈的机械角度变化量包括:
13、给定直轴电流id为电机的额定电流,交轴电流iq为0,给定电机电角度θref为0,并记录此时磁编码器反馈的机械角度θfb;
14、按照预定电机电角度变化量调增给定电机电角度直至电机正向旋转一周,记录每次给定电机电角度以及磁编码器反馈的机械角度以及机械角度变化量。
15、进一步,记录电机反向旋转一周中给定的电机电角度、磁编码器反馈的机械角度、电机电机电角度变化量以及磁编码器反馈的机械角度变化量包括:
16、按照预定电机电角度变化量调低给定电机电角度直至电机电角度减小为0°,记录每次给定电机电角度以及磁编码器反馈的机械角度以及机械角度变化量。
17、进一步,根据电机正向旋转一周记录的数据和电机反向旋转一周记录的数据计算平均角度差包括:
18、根据记录的电机电角度变化量和磁编码器反馈的机械角度变化量按照第一预定公式计算电机极对数p;
19、利用电机极对数p将磁编码器反馈的机械角度变换为编码器电角度;
20、根据变换的编码器电角度和给定的电机电角度计算电角度偏移量;
21、根据每次变换的编码器电角度和给定的电机电角度计算的电角度偏移量按照第二预定公式计算电角度平均角度差。
22、进一步,所述第一预定公式为:
23、
24、其中,∑δθref为记录的所有电机电角度变化量的和,∑δθfb为记录的所有磁编码器反馈的机械角度变化量的和,p为电机极对数。
25、进一步,所述第二预定公式为:
26、
27、其中,θ′fbn为磁编码器反馈的机械角度,θ′refn为给定的电机电角度,p×θ′fbn为变换的编码器电角度,n为编码器反馈的机械角度次数,θerr_dc为电角度平均角度差。
28、本发明的第二方面提供一种电子设备,包括:
29、一个或多个处理器;以及
30、存储装置,用于存储一个或多个程序,当所述一个或多个程序被所述一个或多个处理器执行时,使得所述一个或多个处理器执行如第一方面所述的方法。
31、本发明的第三方面提供一种计算机可读介质,其上存储有计算机程序,所述程序被处理器执行时实现如第一方面所述的方法。
32、本发明根据电机正向旋转一周和电机反向旋转一周记录的数据计算平均角度差,进而对永磁同步电机初始位置进行校准,能够消除电机旋转时机械摩擦、齿槽转矩效应以及磁编码安装精度对编码器反馈位置影响,避免编码器反馈永磁同步电机转子位置不准问题,提高永磁同步电机控制精度。
33、应当理解的是,以上的一般描述和后文的细节描述仅是示例性和解释性的,并不能限制本发明。
技术特征:
1.一种基于磁编码器的永磁同步电机初始位置校准方法,其特征在于,包括如下步骤:
2.如权利要求1所述的永磁同步电机初始位置校准方法,其特征在于,还包括:
3.如权利要求1所述的永磁同步电机初始位置校准方法,其特征在于,还包括:
4.如权利要求1所述的永磁同步电机初始位置校准方法,其特征在于,记录电机正向旋转一周中给定的电机电角度、磁编码器反馈的机械角度、电机电角度变化量以及磁编码器反馈的机械角度变化量包括:
5.如权利要求4所述的永磁同步电机初始位置校准方法,其特征在于,记录电机反向旋转一周中给定的电机电角度、磁编码器反馈的机械角度、电机电机电角度变化量以及磁编码器反馈的机械角度变化量包括:
6.如权利要求1所述的永磁同步电机初始位置校准方法,其特征在于,根据电机正向旋转一周记录的数据和电机反向旋转一周记录的数据计算平均角度差包括:
7.如权利要求6所述的永磁同步电机初始位置校准方法,其特征在于,所述第一预定公式为:
8.如权利要求6所述的永磁同步电机初始位置校准方法,其特征在于,所述第二预定公式为:
9.一种电子设备,其特征在于,包括:
10.一种计算机可读介质,其上存储有计算机程序,其特征在于,所述程序被处理器执行时实现如权利要求1-8任一项所述的方法。
技术总结
本发明公开了一种基于磁编码器的永磁同步电机初始位置校准方法,包括根据电机电角度给定值变化量和磁编码器反馈的机械角度变化量确定电机相序是否正确;在确定电机相序正确后记录电机正向旋转和反向旋转一周中给定的电机电角度、磁编码器反馈的机械角度、电机电角度变化量以及磁编码器反馈的机械角度变化量;根据电机正向和反向旋转一周记录的数据计算平均角度差;根据磁编码器反馈的机械角度和所述平均角度差对电机电角度进行校正得到第一校正电角度。本发明根据电机正向和反向旋转一周记录的数据计算平均角度差,进而对永磁同步电机初始位置进行校准,避免编码器反馈永磁同步电机转子位置不准问题,提高永磁同步电机控制精度。
技术研发人员:马宇,吴庆勋,王永舵,李如飞,刘昊,张利剑
受保护的技术使用者:北京机械设备研究所
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!