一种新型的高压地线除冰机器人及其设计方法
本发明涉及一种可自行在高压输电线地线上移动,并清除地线表面覆冰的机器人,应用于高压输电线的覆冰清理、线路巡查等情景,避免由于极端天气、覆冰等原因造成的输电线断裂或电塔倒塌事故。
背景技术:
1、我国目前清除高压线覆冰主要采取人工高空作业的方式。这一方式效率低、人力物力消耗大,且存在较大的危险性。国内外针对高压地线除冰问题在机器人方面展开了广泛研究并已取得一定成果。
2、由于野外除冰作业的特殊性,除冰机器人需要具备除冰效率高、抗电磁干扰、耐低温大风等恶劣条件等特点。现有机器人采用的除冰方式比较成熟的有铣削除冰、拍打除冰等。采用机械方式除冰相对于使用化学药剂或电热方式更为安全可靠。但切削或拍打冰层需要消耗大量能量,导致该种类型机器人作业范围很有限。
3、在机器人的线上机动方面,已经出现了为巡查线路而设计的巡线机器人,且该技术已经较为成熟,即通过加装v型或弧形的行进轮保证轮子与圆柱状高压线紧密贴合,实现机器人在线上稳定且灵活的移动。但现有机器人普遍存在质量过大,结构复杂,能耗高、巡航范围小等弊端。
技术实现思路
1、本发明为解决公知技术中存在的技术问题而提供一种新型的高压地线除冰机器人及其设计方法,以解决现有技术中存在的问题。
2、为实现本发明目的而采用的技术方案是:
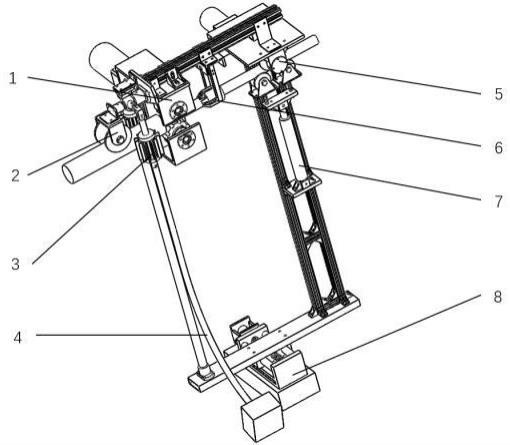
3、一种运用新型除冰机理的高压地线除冰机器人及其设计方法,其特征在于,所述高压地线除冰机器人主要由连接机构、行进机构及夹紧机构、滚刀除冰机构、铣削除冰机构、刮板除冰机构等部分组成。所述高压地线除冰机器人的连接机构主要采用的是欧标3030以及2020的铝合金型材,完成框架的搭建与设计,并且利用角码、法兰等一系列的连接件完成所述除冰机器人各项部分的连接。所述除冰机器人行进机构分为安装在所述除冰机器人前端的导向轮作为从动、安装在所述除冰机器人后端的行进轮作为驱动源。所述行进机构行进轮采用u型轮结构保证与电线紧密接触,所述行进轮轴系由自行设计的轴系连接所述行进轮,并且通过联轴器与电机连接,由电动机带动行进轮运动,从而完成所述除冰机器人在电线上的向前运行。
4、所述高压地线除冰机器人在综合考虑了续航里程和爬坡要求后,为了避免因爬坡能力不够而导致的停滞,或打滑空转影响续航和正常使用,所述高压地线除冰机器人夹紧机构提出增大行进轮和地线之间的摩擦力的方案,在行进轮的另一侧加装了夹紧轮。夹紧轮与地线之间的正压力可通过电推杆推动的弹簧加以控制。
5、所述高压地线除冰机器人最大的亮点在于:相对于以往利用电能驱动铣刀等切削装置进行机械除冰的机构,所述高压地线除冰机器人使用一种斜搭在地线上的滚刀,工作时滚刀将在冰层表面作纯滚动,利用所述滚刀自身及配重的重力分力对冰层进行压溃、切除,节约了一部分驱动所述除冰机器人切削机构的电能。针对所述滚刀刀刃对冰层压力不够大、除冰面积有限的情况,所述高压地线除冰机器人将两滚刀由同轴改为错开安装,同时在所述斜滚刀上安装向外侧弯曲的弯管,使所述斜滚刀更贴近竖直状态,增大了连接轴-滚刀-重物杠杆的力臂,配合重物增大所述斜滚刀对冰层的切削压力,将除冰区域由贴近地线上方扩大到地线侧面。
6、所述高压地线除冰机器人铣削除冰机构的设计,由于冰层情况经常变化,滚刀除冰效果可能不稳定,所述除冰机构在滚刀装置后方加装了铣削机构,在地线上下两侧布置了铣刀,对被滚刀切碎的残冰进行进一步切除。所述铣削机构铣刀采用直流无刷电机驱动,通过传动轴将转动传递到所述铣刀上。经过对冰层厚度及地线直径的测算,所述铣削除冰机构选定了两个所述铣刀之间的最佳中心距。所述铣刀机架上开有加装了滚动轴承的孔用来安装传动轴。
7、所述高压地线除冰机器人刮板除冰机构,主要是为了清除经过两道切削除冰程序后残留的碎冰。所述高压地线除冰机器人在铣削机构后面又加装了一套刮板装置,以保证除冰效果。所述刮板装置上设有周向分布的齿来对粘附在线上的碎冰进行剥离。所述刮板装置配有一个开合装置,可以实现刮板的开合运动,便于机构在地线上的安装。
8、所述高压地线除冰机器人运行在高压地线上,故我们将所述除冰机器人的主要重量安排在所述除冰机器人的下方,这样有利于降低所述除冰机器人整体的重心,保障所述除冰机器人在线上行进时的稳定。所述除冰机器人下方安有配重箱,所述配重箱上配有一套滚珠丝杠,以便调整所述配重箱在水平方向的位置,保持所述除冰机器人的左右平衡。
技术特征:
1.一种运用新型除冰机理的高压地线除冰机器人及其设计方法,其特征在于,所述高压地线除冰机器人主要由连接机构、行进机构及夹紧机构、滚刀除冰机构、铣削除冰机构、刮板除冰机构等部分组成。所述高压地线除冰机器人的连接机构主要采用的是欧标3030以及2020的铝合金型材,完成框架的搭建与设计,并且利用角码、法兰等一系列的连接件完成所述除冰机器人各项部分的连接。所述除冰机器人行进机构分为安装在所述除冰机器人前端的导向轮作为从动、安装在所述除冰机器人后端的行进轮作为驱动源。所述行进机构行进轮采用u型轮结构保证与电线紧密接触,所述行进轮轴系由自行设计的轴系连接所述行进轮,并且通过联轴器与电机连接,由电动机带动行进轮运动,从而完成所述除冰机器人在电线上的向前运行。
2.所述高压地线除冰机器人在综合考虑了续航里程和爬坡要求后,为了避免因爬坡能力不够而导致的停滞,或打滑空转影响续航和正常使用,所述高压地线除冰机器人夹紧机构提出增大行进轮和地线之间的摩擦力的方案,在行进轮的另一侧加装了夹紧轮。夹紧轮与地线之间的正压力可通过电推杆推动的弹簧加以控制。
3.所述高压地线除冰机器人最大的亮点在于:相对于以往利用电能驱动铣刀等切削装置进行机械除冰的机构,所述高压地线除冰机器人使用一种斜搭在地线上的滚刀,工作时滚刀将在冰层表面作纯滚动,利用所述滚刀自身及配重的重力分力对冰层进行压溃、切除,节约了一部分驱动所述除冰机器人切削机构的电能。针对所述滚刀刀刃对冰层压力不够大、除冰面积有限的情况,所述高压地线除冰机器人将两滚刀由同轴改为错开安装,同时在所述斜滚刀上安装向外侧弯曲的弯管,使所述斜滚刀更贴近竖直状态,增大了连接轴-滚刀-重物杠杆的力臂,配合重物增大所述斜滚刀对冰层的切削压力,将除冰区域由贴近地线上方扩大到地线侧面。
4.所述高压地线除冰机器人铣削除冰机构的设计,由于冰层情况经常变化,滚刀除冰效果可能不稳定,所述除冰机构在滚刀装置后方加装了铣削机构,在地线上下两侧布置了铣刀,对被滚刀切碎的残冰进行进一步切除。所述铣削机构铣刀采用直流无刷电机驱动,通过传动轴将转动传递到所述铣刀上。经过对冰层厚度及地线直径的测算,所述铣削除冰机构选定了两个所述铣刀之间的最佳中心距。所述铣刀机架上开有加装了滚动轴承的孔用来安装传动轴。
5.所述高压地线除冰机器人刮板除冰机构,主要是为了清除经过两道切削除冰程序后残留的碎冰。所述高压地线除冰机器人在铣削机构后面又加装了一套刮板装置,以保证除冰效果。所述刮板装置上设有周向分布的齿来对粘附在线上的碎冰进行剥离。所述刮板装置配有一个开合装置,可以实现刮板的开合运动,便于机构在地线上的安装。
6.所述高压地线除冰机器人运行在高压地线上,故我们将所述除冰机器人的主要重量安排在所述除冰机器人的下方,这样有利于降低所述除冰机器人整体的重心,保障所述除冰机器人在线上行进时的稳定。所述除冰机器人下方安有配重箱,所述配重箱上配有一套滚珠丝杠,以便调整所述配重箱在水平方向的位置,保持所述除冰机器人的左右平衡。
技术总结
本发明提供一种可自行在高压输电线地线上移动,并清除地线表面覆冰的机器人设计方法,应用于高压输电线的覆冰清理、线路巡查等情景,可以有效避免由于极端天气、覆冰等原因造成的输电线断裂或电塔倒塌事故,具有广阔的应用前景。
技术研发人员:宋智斌,张禹泽,赵竞夫,詹毓靖,陈丁源,刘国辰,侯振民,戴建生
受保护的技术使用者:天津大学
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!