自适应抗扰控制的高速永磁同步电机转矩纹波抑制方法
本发明属于高速永磁同步电机控制,涉及一种自适应抗扰控制的高速永磁同步电机转矩纹波抑制方法。
背景技术:
1、高速永磁同步电机转速高、体积小、功率密度高,转子和高速负载直接相连,降低了系统结构复杂性和冗余度,提高了系统集成度和可靠性,在军事、航空航天、工业、医疗、民用等领域具有重要的研究前景和广泛的应用价值。由于高速永磁同步电机磁饱和特性、装配误差、以及控制上的电流偏差、谐波等因素,导致高速永磁同步电机驱动系统产生转矩纹波。高速永磁同步电机的转矩纹波会降低设备的使用性能和使用寿命,例如转矩纹波会降低数控机床加工精度、电动汽车运行平稳性、机器人定位精度等。因此,抑制高速永磁同步电机驱动系统的转矩纹波,提高驱动系统转矩品质,是提高含高速永磁同步电机驱动系统的设备使用性能和延长使用寿命的关键。
2、目前,在高速永磁同步电机驱动系统转矩纹波抑制方法中,扩张状态观测器通过将系统中的非线性动态、参数不确定以及外部扰动视为系统总扰动,将系统总扰动作为系统的一个扩展状态变量对其进行观测,不依赖被控对象的精确数学模型,抗扰动能力强,因而得到了广泛的研究与应用。然而,扩张状态观测器具有低通滤波特性,并且转矩纹波中包含非周期的低频转矩纹波和周期转矩纹波,周期转矩纹波的频率随电机运行的频率的增加而增大,导致扩张状态观测器难以抑制周期转矩纹波。
技术实现思路
1、本发明的目的是提供一种自适应抗扰控制的高速永磁同步电机转矩纹波抑制方法,解决了现有扩张状态观测器难以抑制高速永磁同步电机驱动系统转矩纹波中周期转矩纹波的问题。
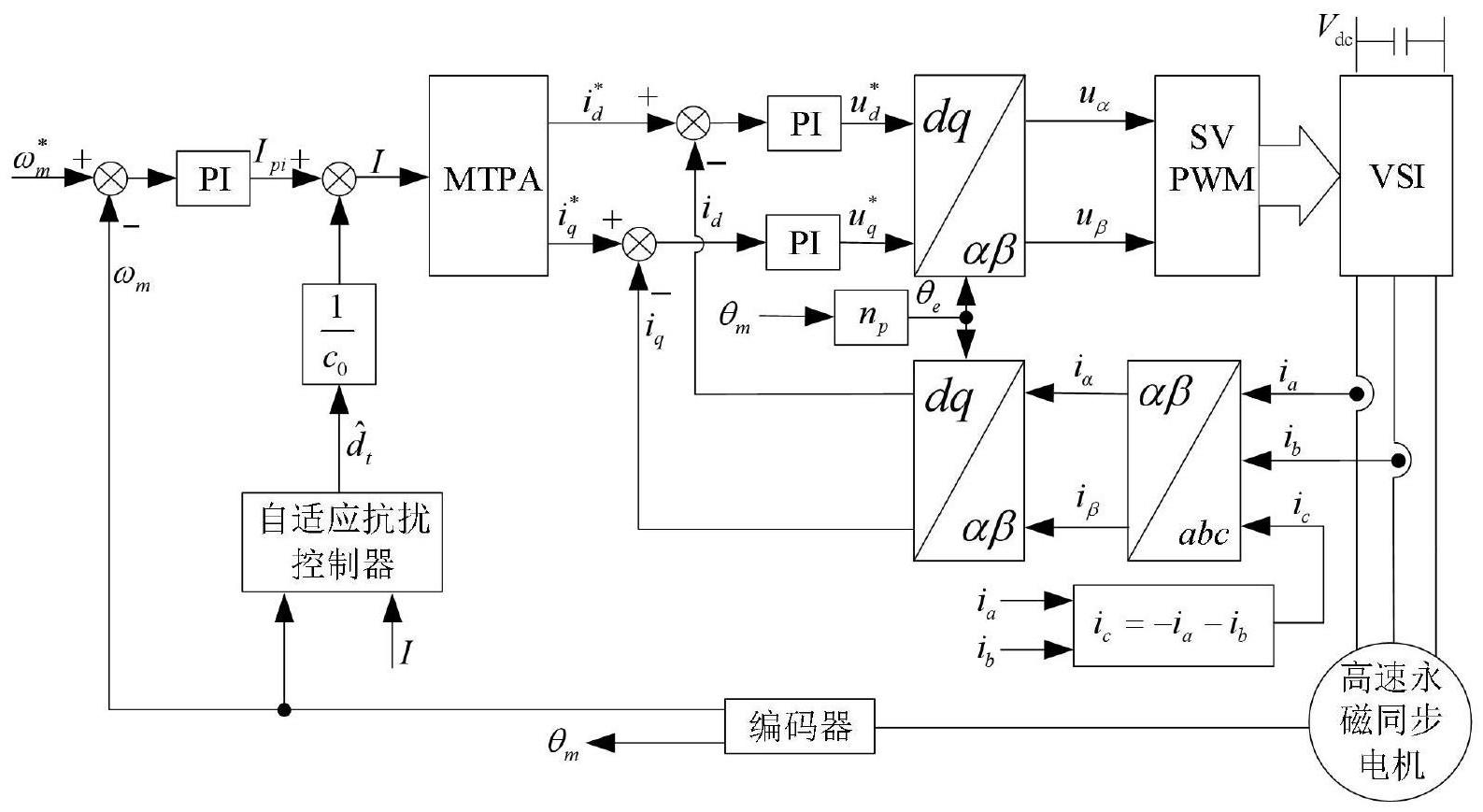
2、本发明所采用的技术方案是,自适应抗扰控制的高速永磁同步电机转矩纹波抑制方法,具体包括如下步骤:
3、步骤1,建立高速永磁同步电机驱动系统非理想因素引起的转矩纹波模型;
4、步骤2,通过步骤1得到的转矩纹波模型构建高速永磁同步电机驱动系统状态方程;
5、步骤3,由步骤2中得到的状态方程建立自适应抗扰控制器抑制转矩纹波。
6、本发明的特点还在于:
7、步骤1的具体过程为:
8、假设电流采样过程中只采样a相和b相电流,由电流采样直流偏置误差引起的转矩纹波如下公式(1)所示:
9、
10、其中,δt1是由电流采样直流偏置误差引起的转矩纹波,k是转矩系数,δia、δia分别为a相和b相电流采样直流偏置误差,ωr是电机运行角频率,是初相角;
11、由电流采样缩放误差引起的转矩纹波如下公式(2)所示:
12、
13、其中,δts是由电流采样缩放误差引起的转矩纹波,i是相电流的振幅,ka、kb分别是a相和b相电流采样缩放误差,
14、由齿槽转矩、磁链谐波、电压谐波引起的转矩纹波如下公式(3)所示:
15、
16、其中,δtq是由齿槽转矩、磁链谐波、电压谐波引起的转矩纹波,分别是由齿槽转矩、磁链谐波、电压谐波引起的6次和12次转矩纹波,分别是由齿槽转矩、磁链谐波、电压谐波引起的6次和12次转矩纹波的初相角,t6、t12分别是由齿槽转矩、磁链谐波、电压谐波引起的6次和12次转矩纹波的振幅。
17、步骤2的具体过程为:
18、高速永磁同步电机动力学方程如下公式(4)所示:
19、
20、其中,p是微分算子,ωm是机械角频率,b是粘滞摩擦系数,c=(3/2j)npψfsinβ,j是转动惯量,np是极对数,ψf是永磁体磁链,β是定子磁链和永磁体磁链的夹角,δte=(3/2j)np(ld-lq)i2sinβcosβ,ld是d轴电感,lq是q轴电感;
21、考虑公式(1)~(3)的转矩纹波,动力学公式(4)表示为如下公式(5)所示:
22、
23、其中,δc=c-c0,c0是取标称电机参数计算的c,d是未知非周期扰动;
24、根据扰动的频率特性公式(5)可以表示为如下公式(6)所示:
25、pωm=c0i+da+d1+d2+d6+d12 (6);
26、其中,是非周期扰动,是1次周期纹波,是2次周期纹波,是6次周期纹波,是12次周期纹波;
27、将公式(6)中的总扰动dt=da+d1+d2+d6+d12作为扩展状态变量,可以将具有总扰动的动力学方程(6)表示为扩展状态方程形式如下公式(7)所示:
28、
29、其中,z是总扰动dt的导数。
30、步骤3的具体过程为:
31、步骤3.1,通过步骤2得到的状态方程建立自适应抗扰控制器抑制转矩纹波;
32、步骤3.2,设计步骤3.1中自适应抗扰控制器中的非线性函数f;
33、步骤3.3,设计自适应抗扰控制器中的周期扰动估计器g1、g2、g6、g12。
34、步骤3.1的具体过程为:
35、通过公式(7)构建自适应抗扰控制器如下公式(8)所示:
36、
37、其中,是估计的机械角频率,δωm是估计的机械角频率与实际角频率的差,是估计的总扰动,β1、β2是可调参数,f是一个非线性函数,g1、g2、g6、g12分别是估计1次、2次、6次、12次转矩纹波的周期扰动估计器。
38、步骤3.2的具体过程为:
39、设计的自适应抗扰控制器中非线性函数f如下公式(9)所示:
40、
41、其中,χ是可调参数,χ越大,同样的δωm输入下,非线性函数f的值越大,估计扰动的快速性越好,然而过大的χ易导致系统失稳;λ是可调参数。
42、步骤3.3的具体过程为:
43、设计的周期扰动估计器g1、g2、g6、g12如下公式(10)所示:
44、
45、其中,k是可调参数;η是可调参数,是中心频率的宽度,调节方法如下公式(11)所示:
46、
47、本发明的有益效果是,与传统扩张状态观测器抑制转矩纹波方法相比,本发明采用的自适应抗扰控制器不但能抑制非周期转矩纹波还可以抑制周期转矩纹波,即使高速永磁同步电机在高速运行时也可以有效抑制快速变化的周期转矩纹波,并且设计的周期扰动估计器可以通过自适应调整可调参数提高估计周期转矩纹波的稳定性和快速性。同时,设计的非线性函数f对大误差具有鲁棒作用,可以有效抑制转矩纹波的同时不增加系统失稳得风险。解决了现有扩张状态观测器难以抑制高速永磁同步电机驱动系统转矩纹波中周期转矩纹波的问题。
技术特征:
1.自适应抗扰控制的高速永磁同步电机转矩纹波抑制方法,其特征在于:具体包括如下步骤:
2.根据权利要求1所述的自适应抗扰控制的高速永磁同步电机转矩纹波抑制方法,其特征在于:所述步骤1的具体过程为:
3.根据权利要求2所述的自适应抗扰控制的高速永磁同步电机转矩纹波抑制方法,其特征在于:所述步骤2的具体过程为:
4.根据权利要求3所述的自适应抗扰控制的高速永磁同步电机转矩纹波抑制方法,其特征在于:所述步骤3的具体过程为:
5.根据权利要求4所述的自适应抗扰控制的高速永磁同步电机转矩纹波抑制方法,其特征在于:所述步骤3.1的具体过程为:
6.根据权利要求5所述的自适应抗扰控制的高速永磁同步电机转矩纹波抑制方法,其特征在于:所述步骤3.2的具体过程为:
7.根据权利要求6所述的自适应抗扰控制的高速永磁同步电机转矩纹波抑制方法,其特征在于:所述步骤3.3的具体过程为:
技术总结
本发明公开了一种自适应抗扰控制的高速永磁同步电机转矩纹波抑制方法,具体包括如下步骤:步骤1,建立高速永磁同步电机驱动系统非理想因素引起的转矩纹波模型;步骤2,通过步骤1得到的转矩纹波模型构建高速永磁同步电机驱动系统状态方程;步骤3,由步骤2中得到的状态方程建立自适应抗扰控制器抑制转矩纹波。解决了现有扩张状态观测器难以抑制高速永磁同步电机驱动系统转矩纹波中周期转矩纹波的问题。
技术研发人员:张彦平,尹忠刚,张昱,闵文斌
受保护的技术使用者:西安理工大学
技术研发日:
技术公布日:2024/1/11
- 还没有人留言评论。精彩留言会获得点赞!