一种应用于拖动的同步电动机的控制方法与流程
本发明属于同步电动机的控制方法,特别是涉及一种应用于拖动的同步电动机定转子的控制方法。
背景技术:
0、技术背景
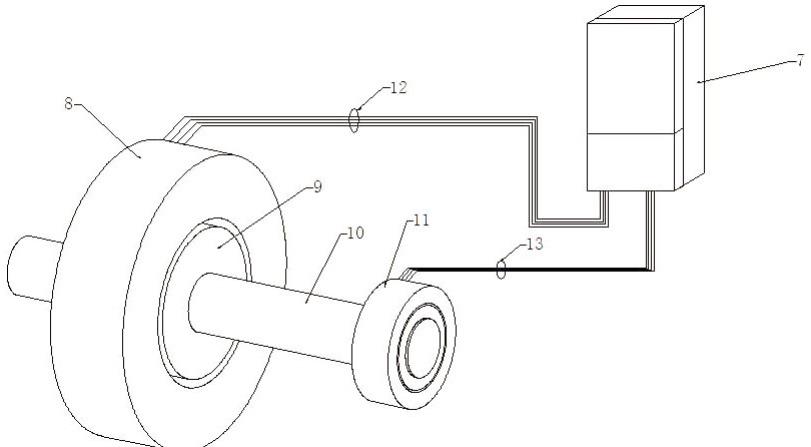
1、目前较为广泛应用于拖动的同步电动机主要有无刷直流电动机和开关磁阻电动机两类,其中无刷直流电动机的用量占据绝大多数。从图1可知,现有应用于拖动的同步电动机的控制系统大都由控制器7、转子位置编码器11和位置信号线13组成,控制器7通过位置信号线13接收来自转子位置编码器11的位置信号,该信号经过控制器7计算处理后,控制器7将励磁电流从控制器励磁电流输出线12送到电动机电枢8,各相励磁电流轮流在同步电动机电枢8中的定子磁极1中产生磁场,其转子磁极3在其定子磁极1所产生的磁场中产生转矩而发生旋转,转子位置编码器11与同步电动机转子9之间采用转子轴10刚性连接保证同步电动机转子9的实时位置能被转子位置编码器11实时读取并送到控制器7。下面分别介绍传统无刷直流电动机和传统开关磁阻电动机的工作原理,图2为三相4/6极传统无刷直流电动机的结构示意图,其转子有4个永磁块构成的转子磁极3和6个定子磁极1,每个定子磁极1仅包含一个定子齿,其转子任意相邻的两个转子磁极3的磁极性相反,定子磁极包含w v u三相定子磁极1,每相包含两个且通电后这两个磁极性相同,w v u三相定子磁极的励磁线圈构成星形连接,各相定子磁极的磁极性由该相励磁电流方向决定,该电动机的定子磁极1励磁后与转子磁极3产生力的作用而发生旋转。图3、图4分别为传统无刷直流电动机逆时针旋转过程中的连续两个换相状态的工作示意图,覆盖阴影的定子磁极表示处于通励磁电流工作中的定子磁极,可以看出传统无刷直流电动机在运行过程中只有2/3的定子磁极1牵引转子磁极3,而且运行过程中定子磁极1与转子磁极3的夹角一直在变化而不是始终维持最大转矩功角,该电动机运行过程中只有部分定子磁极在工作。
2、图5是三相4/6极传统开关磁阻电动机的结构示意图,传统开关磁阻电动机的定子磁极与转子磁极宽度相等,其转子磁极2圆弧对应最佳圆心角的算法:360度除以2倍定子磁极数,其转子有4个硅钢片凸极构成的转子磁极2,根据上述算法可计算出该电动机每个转子磁极2圆弧对应最佳圆心角为30度,其定子有6个定子磁极1,每个定子磁极1仅包含一个定子齿,定子磁极包含w v u三相定子磁极1,每相包含两个定子磁极1且通电后这两个磁极性相反,每个定子磁极1圆弧对应最佳圆心角为30度,所有定子磁极所对圆心角总和为π,仅利用了定子内侧面积的一半,每个转子磁极2圆弧所对圆心角最佳宽度为30度,所有转子磁极所对圆心角总和为2/3π,传统开关磁阻电动机运行过程中,线圈通电后定子磁极1产生磁场吸引转子磁极2而是转子发生旋转。图6、图7为传统开关磁阻电动机逆时针运行的连续两个换相状态的工作示意图,可以看出传统开关磁阻电动机在运行过程中只有1/3—2/3的定子磁极1牵引1/2—全部的转子磁极2,而且运行过程中定子磁极1与转子磁极2的夹角一直在变化而不是始终维持最大转矩功角。
3、可以看出,这两类电动机由于定子磁极与转子磁极数量不相等,在运行过程中的任意时刻都只有1/3—2/3的定子内侧面以及1/2左右的转子磁极工作,而且这些工作中的定子磁极与转子磁极并没有始终维持最大转矩功角,这样就没有充分利用同步电动机定子内侧面和转子磁极,使其转矩密度以及功率密度没得到充分发挥,严重地限制了同步电动机本体定子内侧面以及定转子磁极的利用率,导致现有同步电动机本体的转矩密度以及功率密度没得到充分发挥。
技术实现思路
1、本发明的目的在于提供一种同步电动机定转子的控制方法,使得同步电动机运行过程中,所有定子内侧面和所有的转子磁极同时工作,且定子磁极与转子磁极始终保持最大转矩功角,这样同步电动机定子内侧面和转子磁极得到充分利用,其转矩密度以及功率密度得到充分发挥。
2、本发明采用的技术方案是:一种应用于拖动的同步电动机的控制方法,电动机本体的定子磁极与转子磁极数量相等,且运行过程中所有的定子磁极全部驱动对应的转子磁极做功;每一个定子磁极包含不少于2个定子齿;每一个定子磁极的磁通量至少由两相励磁电流共同形成,定子磁极在定子内侧面所在的位置以及其磁感应强度由各相励磁电流的相位以及瞬时幅值共同决定。
3、控制器根据位置传感器的实时数据预算出最大转矩功角位置,再由最大转矩功角位置计算出各相励磁电流的相位以及幅值,并按照计算结果输出各相励磁电流,各相励磁电流在预算出的最大转矩功角位置处形成定子磁极,所述定子磁极沿转矩方向与转子磁极始终维持最大转矩的功角。
4、控制器通过转矩方向指令来控制励磁电流的相序,从而控制定子磁极旋转的方向。
5、所述同步电动机为多相动电机,电动机电枢的各相线圈均为独立线圈。
6、电动机电枢的各相线圈通过正弦波电流,且任意相邻两相之间的相位差相等,各相电流瞬时值在定子铁芯中所产生的磁通量进行矢量合成而在定子中形成等宽的偶数个定子磁极,且任意相邻两个定子磁极的磁极性相反,且定子磁极随着各相励磁电流瞬时值变化而沿着定子内侧面发生位移。
7、本发明应用于磁阻电动机时其转子每个转子磁极圆弧所对最佳圆心角的为360度除以2倍转子磁极数,机轴每旋转单个转子磁极圆弧所对最佳圆心角2倍角度,位置编码器将输出固定数量的位置数据,且每个位置数据对应上述2倍转子磁极圆弧所对最佳圆心角空间范围内唯一的转子位置。
8、本发明的有益效果:
9、应用本发明后的无刷直流电动机在其运行过程中,其定子内侧面和转子磁极的利用率90/100以上,且运行过程中这些定子磁极与转子磁极始终维持最大转矩功角,使其转矩密度比传统开关磁阻电动机增加1倍以上,等转速情况下功率密度也增加1倍以上。应用本发明后的磁阻电动机,最佳宽度转子磁极所对圆心角总和可以增加至π,在其运行过程中其定子内侧面和转子磁极的利用率为90/100左右,且运行过程中这些定子磁极与转子磁极始终维持最大转矩功角,使其在安匝数相同的前提下转矩密度比传统开关磁阻电动机增加1—2倍,同转速情况下功率密度也增加1—2倍。
10、本发明可以大幅提升同步电动机的转矩密度和功率密度,这样即可在同等功率前提下大幅减少电机本体体积和重量,从而大幅降低生产成本从而大幅提升同步电动机本体的性价比,可广泛应用于工业中的电力拖动,电动机车如高速列车和电动汽车的牵引以及家用电器中
技术特征:
1.一种应用于拖动的同步电动机的控制方法,其特征在于:电动机本体的定子磁极与转子磁极数量相等,且运行过程中所有的定子磁极全部驱动对应的转子磁极做功;每一个定子磁极包含不少于2个定子齿;每一个定子磁极的磁通量至少由两相励磁电流共同形成,定子磁极在定子内侧面所在的位置以及其磁感应强度由各相励磁电流的相位以及瞬时幅值共同决定。
2.根据权利要求1所述的一种应用于拖动的同步电动机的控制方法,其特征在于:控制器根据位置传感器的实时数据预算出最大转矩功角位置,再由最大转矩功角位置计算出各相励磁电流的相位以及幅值,并按照计算结果输出各相励磁电流,各相励磁电流在预算出的最大转矩功角位置处形成定子磁极,所述定子磁极沿转矩方向与转子磁极始终维持最大转矩的功角。
3.根据权利要求1所述的一种应用于拖动的同步电动机的控制方法,其特征在于:控制器通过转矩方向指令来控制励磁电流的相序,从而控制定子磁极旋转的方向。
4.根据权利要求1所述的一种应用于拖动的同步电动机的控制方法,其特征在于:所述同步电动机为多相动电机,电动机电枢的各相线圈均为独立线圈。
5.根据权利要求4所述的一种应用于拖动的同步电动机的控制方法,其特征在于:所述同步电动机为二相动电机或三相动电机。
技术总结
本发明公开了一种应用于拖动的同步电动机的控制方法,电动机本体的定子磁极与转子磁极数量相等,且运行过程中所有的定子磁极全部驱动对应的转子磁极做功;每一个定子磁极包含不少于2个定子齿;每一个定子磁极的磁通量至少由两相励磁电流共同形成,定子磁极在定子内侧面所在的位置以及其磁感应强度由各相励磁电流的相位以及瞬时幅值共同决定。本发明使得同步电动机运行过程中,所有定子内侧面和所有的转子磁极同时工作,且定子磁极与转子磁极始终保持最大转矩功角,可以大幅提升同步电动机的转矩密度和功率密度,在同等功率前提下大幅减少电机本体体积和重量,提升同步电动机本体的性价比,可广泛应用于工业中的电力拖动,电动机车如高速列车和电动汽车的牵引以及家用电器中。
技术研发人员:刘翔鹏,刘邦杰,刘超群
受保护的技术使用者:刘翔鹏
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!