一种光伏逆变器VSG协同自适应控制方法与流程
本公开涉及电力电子领域,具体地,涉及一种光伏逆变器vsg协同自适应控制方法。
背景技术:
1、在面对越来越多的分布式电源接入电网的背景下,如何实现分布式电源的友好接入,减小电源、负载、电网或者微网间的消极影响是当前分布式能源方向的研究热点。光伏逆变器vsg技术可有效的解决分布式电源渗透率高引起系统欠阻尼、低惯性问题,促进电源和负载的协调性。
2、在光伏逆变器vsg并网运行时,时常出现给定功率变化、电网频率波动的情况,极易造成系统频率不稳定,使光伏逆变器vsg难以满足运行性能指标。
技术实现思路
1、本公开的目的是提供一种光伏逆变器vsg协同自适应控制方法,能够使光伏逆变器vsg在并网运行的过程中,提高系统频率的稳定性。
2、为了实现上述目的,本公开提供一种光伏逆变器vsg协同自适应控制方法,包括:
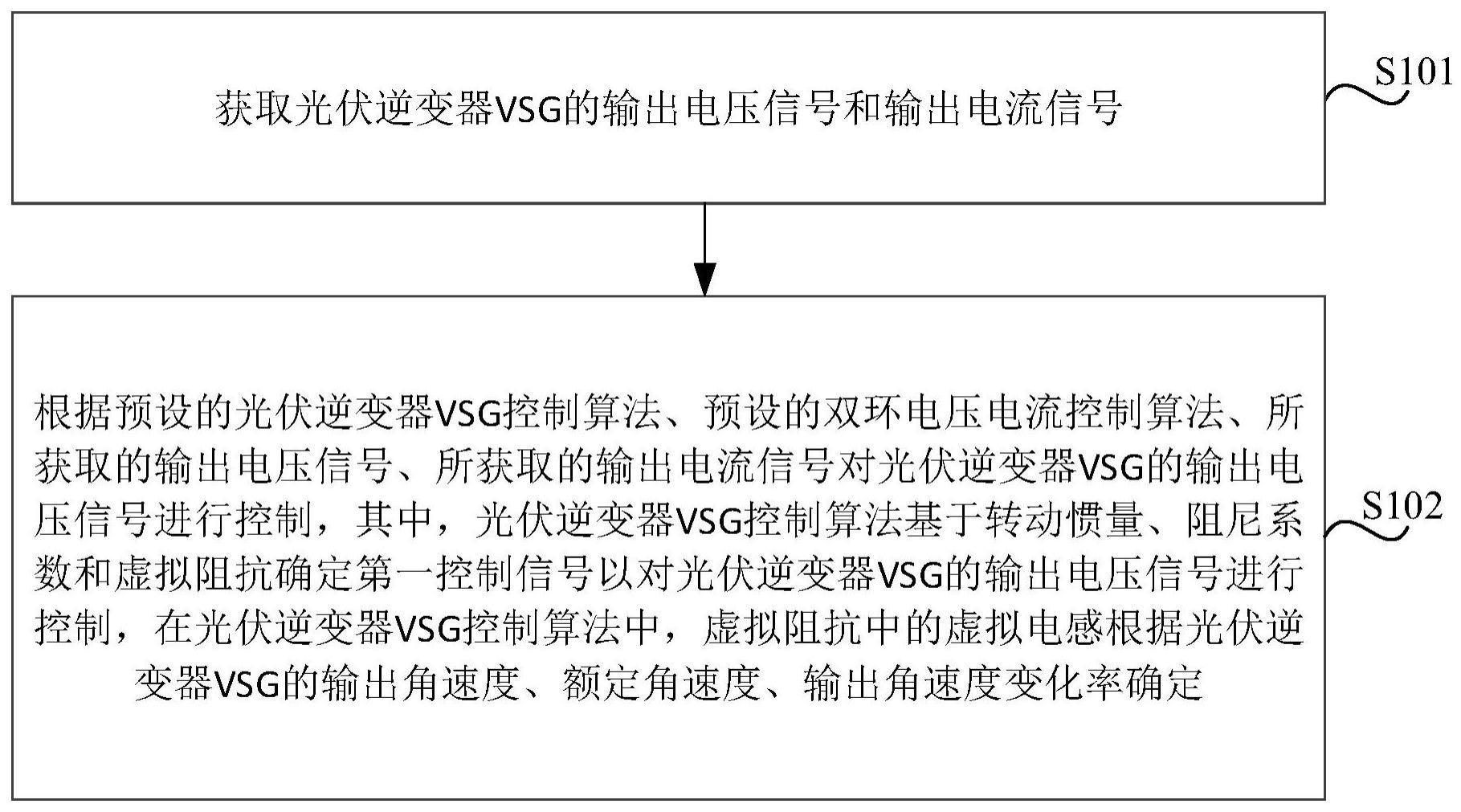
3、获取所述光伏逆变器vsg的输出电压信号和输出电流信号;
4、根据预设的光伏逆变器vsg控制算法、预设的双环电压电流控制算法、所获取的输出电压信号、所获取的输出电流信号对所述光伏逆变器vsg的输出电压信号进行控制,其中,所述光伏逆变器vsg控制算法基于转动惯量、阻尼系数和虚拟阻抗确定第一控制信号以对所述光伏逆变器vsg的输出电压信号进行控制,在所述光伏逆变器vsg控制算法中,所述虚拟阻抗中的虚拟电感根据所述光伏逆变器vsg的输出角速度、额定角速度、输出角速度变化率确定。
5、可选地,所述虚拟阻抗中的所述虚拟电感根据所述输出角速度与所述额定角速度之差、所述输出角速度变化率、预设的虚拟阻抗调节系数以及所述光伏逆变器vsg的初始虚拟电感确定。
6、可选地,所述转动惯量根据所述光伏逆变器vsg的所述输出角速度、所述额定角速度、所述输出角速度变化率确定。
7、可选地,所述阻尼系数根据所述光伏逆变器vsg的所述输出角速度、所述额定角速度、所述输出角速度变化率确定。
8、可选地,所述转动惯量根据所述输出角速度与所述额定角速度之差、所述输出角速度变化率、预设的转动惯量调节系数以及所述光伏逆变器vsg的初始转动惯量确定。
9、可选地,所述阻尼系数根据所述输出角速度与所述额定角速度之差、所述输出角速度变化率、预设的阻尼系数调节系数以及所述光伏逆变器vsg的初始阻尼系数确定。
10、可选地,在所述光伏逆变器vsg控制算法中,所述转动惯量根据以下公式确定:
11、
12、其中,j为所述转动惯量,j0为所述初始转动惯量,a为所述转动惯量调节系数,δω为所述输出角速度与所述额定角速度之差,为所述输出角速度变化率,a1为第一角速度变化率阈值。
13、可选地,在所述光伏逆变器vsg控制算法中,所述阻尼系数根据以下公式确定:
14、
15、其中,d为所述阻尼系数,d0为所述初始阻尼系数,b为所述阻尼系数调节系数,δω为所述输出角速度与所述额定角速度之差,为所述输出角速度变化率,a2为第二角速度变化率阈值。
16、可选地,所述虚拟阻抗中的虚拟电感根据以下公式确定:
17、
18、其中,lv为所述虚拟电感,lv0为所述初始虚拟电感,α为所述虚拟阻抗调节系数,δω为所述输出角速度与所述额定角速度之差,为所述输出角速度变化率,a3为第三角速度变化率阈值。
19、可选地,所述转动惯量调节系数满足以下条件:
20、
21、其中,jmax为所述光伏逆变器vsg的最大转动惯量,[δω(dω/dt)]max为所述输出角速度与所述额定角速度之差与所述输出角速度变化率乘积的最大值。
22、通过上述技术方案,光伏逆变器vsg控制算法中包括虚拟阻抗反馈回路,虚拟阻抗反馈回路中的虚拟阻抗根据光伏逆变器vsg的输出角速度、额定角速度、输出角速度变化率确定,实现功率解耦的同时提高光伏逆变器vsg输出频率的响应速度,提高光伏逆变器vsg运行的稳定性。
23、本公开的其他特征和优点将在随后的具体实施方式部分予以详细说明。
技术特征:
1.一种光伏逆变器vsg协同自适应控制方法,其特征在于,包括:
2.根据权利要求1所述的方法,其特征在于,所述虚拟阻抗中的所述虚拟电感根据所述输出角速度与所述额定角速度之差、所述输出角速度变化率、预设的虚拟阻抗调节系数以及所述光伏逆变器vsg的初始虚拟电感确定。
3.根据权利要求1所述的方法,其特征在于,所述转动惯量根据所述光伏逆变器vsg的所述输出角速度、所述额定角速度、所述输出角速度变化率确定。
4.根据权利要求1所述的方法,其特征在于,所述阻尼系数根据所述光伏逆变器vsg的所述输出角速度、所述额定角速度、所述输出角速度变化率确定。
5.根据权利要求3所述的方法,其特征在于,所述转动惯量根据所述输出角速度与所述额定角速度之差、所述输出角速度变化率、预设的转动惯量调节系数以及所述光伏逆变器vsg的初始转动惯量确定。
6.根据权利要求4所述的方法,其特征在于,所述阻尼系数根据所述输出角速度与所述额定角速度之差、所述输出角速度变化率、预设的阻尼系数调节系数以及所述光伏逆变器vsg的初始阻尼系数确定。
7.根据权利要求5所述的方法,其特征在于,在所述光伏逆变器vsg控制算法中,所述转动惯量根据以下公式确定:
8.根据权利要求6所述的方法,其特征在于,在所述光伏逆变器vsg控制算法中,所述阻尼系数根据以下公式确定:
9.根据权利要求2所述的方法,其特征在于,所述虚拟阻抗中的虚拟电感根据以下公式确定:
10.根据权利要求7所述的方法,其特征在于,所述转动惯量调节系数满足以下条件:
技术总结
本公开涉及一种光伏逆变器VSG协同自适应控制方法,所述方法包括:获取所述光伏逆变器VSG的输出电压信号和输出电流信号;根据预设的光伏逆变器VSG控制算法、预设的双环电压电流控制算法、所获取的输出电压信号、所获取的输出电流信号对所述光伏逆变器VSG的输出电压信号进行控制,其中,所述光伏逆变器VSG控制算法基于转动惯量、阻尼系数和虚拟阻抗确定第一控制信号以对所述光伏逆变器VSG的输出电压信号进行控制,在所述光伏逆变器VSG控制算法中,所述虚拟阻抗中的虚拟电感根据所述光伏逆变器VSG的输出角速度、额定角速度、输出角速度变化率确定。
技术研发人员:赵重阳,柴伟,陈琳,芮蓓蓓
受保护的技术使用者:国家能源集团谏壁发电厂
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!